
天光一号预放大器自动准直技术研究
2019-06-14 03:58胡凤明高智星田宝贤
原子能科学技术 2019年6期
李 静,王 钊,胡凤明,高智星,田宝贤
(中国原子能科学研究院 核物理研究所,北京 102413)
天光一号是我国最大型的高功率准分子激光系统,工作波长为248 nm,其角多路系统光束传输方向的准确控制能力决定了放大器的几何填充和能量提取水平。天光一号装置的光路中包含多台放电泵浦激光器、电子束泵浦放大器及大量的光学元件、组件,尤其是激光分成多路后,在空间形成交错,使得光路极为复杂。为了避免各路光束相互之间发生串扰产生靶前预脉冲,保证系统运行时将从振荡器发出的种子光经角多路系统传输、放大后,稳定精确地照射到靶面上,必须采用光路全自动化准直方法,这是确保光束稳定精确地照射到靶面上的唯一途径[1-4]。
国内神光Ⅱ、神光Ⅲ等大型激光装置均先后开展了自动准直技术的研究工作[5-16],进行了相关计算并搭建了局部光路平台进行实验研究。他们多采用引入辅助光源并选取近场点与远场点的方法,进行光路自动准直。远场点取在光路的焦点处相当于无穷远的位置,利用远场图像来监测光束的方向,再在主光路中选取一特定位置作为近场点,利用近场图像来监测光束的方位。
本文选取光程较长、组件较多的预放大器光路作为关键控制对象对天光一号装置自动准直方法进行研究。根据准分子激光的特点,采用主光路光源作为准直光源,并利用判断光斑缺损的方法进行准直,在预放大器的角多路传输光路上实现三束光的自动准直。
1 自动准直方法建立
1.1 基准光源选取
天光一号KrF高功率准分子激光装置的光路系统较为复杂,为了确定适合其实际光路系统自动准直的方案,首先选取单路预放大器输入、输出作为控制对象。对于角多路编码光束在预放大器中的放大,光束传输方向决定了几何填充和能量提取水平,保证光束按预定方向通过预放大器至关重要;为保证光束的均匀性,在像传递过程中像面位置不能发生变化。曾尝试采用国内外较通用的利用辅助准直光源的远场点和近场点实现光路自动准直的方法。实验结果发现,由于主光源(波长248 nm)与辅助光源(He-Ne,波长632 nm)的波长不同,导致主光源的光束传输路径与辅助准直光源的光路无法精确重合。此外,在实验中还发现,用于监测近场点和远场点反射的辅助光路和整个复杂的主振荡功率放大器(MOPA)系统在空间上很难错开。综上考虑,需要开展直接利用主光路光源进行定位的可行性研究。
1.2 预放大器输入、输出自动准直方案
在天光一号装置的角多路系统中,前端种子光经分束光路分为3束,通过三腔放大器放大后的激光照射到预放大器的输入全反镜上。预放大器单束光路如图1所示,光束通过入射透镜后,注入预放大器,通过预放大器前窗镜、后窗镜、后腔镜进行振荡双程放大后输出,再经过输出透镜,照射到输出全反镜上。
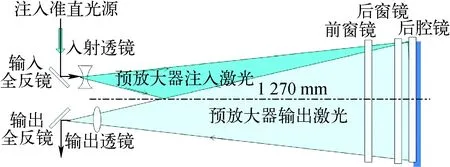
图1 预放大器单束光路示意图Fig.1 Scheme of beam propagation through preamplifier
为验证直接监测光束传输方法的可行性,根据光传输原理和实际光路情况,制定了监测调节实验方案。最初的考虑是,利用CCD监测后腔镜上光斑图像获得的反馈信号控制调节预放大器输入全反镜,完成第1段光路准直;再通过CCD监测预放大器输出全反镜获得反馈信号来控制后腔镜的调节,完成整个预放大器光路的自动准直。但调研中发现此方案难点较多:首先,直径φ135 mm后腔镜及支撑架的质量为6 kg,其四维调节平台需改为电动控制平台,由于载质量问题四维调节平台设计难度和造价均较高;其次,后腔镜上的光斑直径较大,监测点空间局限等问题造成后腔镜监测CCD安装位置较难解决。
预放大器光路较长,即使入射光偏移很小,远程镜面上的位移量也会较大。因此,选择直接用CCD监测预放大器输出全反镜上的光斑、反馈信号控制调节预放大器入射全反镜角度的方案,对此方案进行实验验证。选用稳定的红光模拟注入光光源,在保证注入入射全反镜上光斑位置近场分布不变的条件下,调节输入全反镜的入射角度,确定入射角度变化的调节范围,即在多大调节范围内,像面位置无明显变化,光斑几何填充无缺损,能量提取达到最大。进而确定输入全反镜角度旋转范围及步进电机控制的最小步长。

图2 预放大器单束光路尺寸Fig.2 Spatial parameter of beam propagation through preamplifier
预放大器单束激光输入、输出全反镜与窗镜的中心呈轴对称分布,预放大器单束光路尺寸如图2所示,AM为输入全反镜到前窗镜的距离,AB为入射光的光轴,CB为输入、输出全反镜到后腔镜的距离,MF为前窗镜有效面积的半径,HE为入射到前窗镜上光斑的半径。已知D=CB=12 700 mm,D1=FB=730 mm,d=MF=AC=60 mm,d1=HE=55 mm,设前窗镜上光斑中心与前窗镜中心的距离EF为h,光斑最大可移动的距离HM为Δd,所对应的最大可偏移的角度∠MAH为α,AB与AC的夹角为θ,由三角形公式可得:
则:
Δd=d-d1-h=
60-55-3.45=1.55 mm
由于输入全反镜到输入透镜的距离为1.5 m,调节过程中,注入光束在入射透镜上的位移远小于1 mm,可忽略不计。
根据上述计算结果可知,光斑的最大偏移角度小于0.007°时,注入预放大器的光斑则不会被切。将光路偏移角度换算为调节镜架的偏转角度。预放大器输入、输出调节镜架的尺寸如图3所示,调节镜架顶丝与固定点之间的距离为44 mm,设调节镜架旋转角度为β,顶丝移动距离为L,当入射光束偏转α角度时,根据平面几何可知2β等于α,则:
L=44sin(0.003 5°)=2.7×10-3mm

图3 预放大器输入、输出调节镜架的尺寸Fig.3 Sketch drawing of mirror holder for input/output beam of preamplifier
二维镜架的调节是由控制器驱动步进电机,进而带动顶丝旋转实现的。顶丝螺纹间距为0.25 mm,转动1圈需200个驱动脉冲。控制器可将驱动脉冲信号细分为2的倍数,选择控制器为4细分时,顶丝每行进1步的位移R为:
设调节镜架螺杆移动1步长R时,前窗镜上光斑移动的距离为2Δx,由近似三角形公式可得:
则:
0.085 mm
由此可得,调节镜架移动1步长前窗镜上光斑移动的距离2Δx=0.085×2=0.17 mm,精度远高于用目视方法手工调节时的精度(约2 mm)。
2 预放大器输入、输出自动准直系统的建立
自动准直系统光路控制流程如图4所示。准直光源采用实际光路光源,CCD监测预放大器输出全反镜上的光斑,图像传送到计算机从而判断光斑是否缺损,由计算机软件利用重心法计算偏移量,计算机按照计算值控制步进电机控制器,再由控制器控制步进电机的调节步长及方向,即达到控制预放大系统输入全反镜的目的。反复上述调节过程,直至计算机判断监测光斑无缺损位置,即完成此段光路的自动准直。图5为CCD监测预放大器输出光斑的图像。

图4 自动准直系统光路控制流程Fig.4 Flow chart of automatic collimation system

图5 预放大器输出光斑的图像Fig.5 Beam profile on output mirror of preamplifier
3 预放大器输入、输出自动准直系统的测试结果
根据预放大器输入、输出特性,完成了其自动准直系统设计,建立了一套光路自动准直装置。该装置输入端选用步长为1.0 μm步进电机,电动调节镜架的顶丝选用0.25 mm的细牙螺纹。控制器调节精度选用4细分,预放大器输入、输出的调节镜架移动1步长的距离为0.085 mm时,前窗镜上光斑移动的距离为0.17 mm。
考虑到国产步进电机控制系统的回程差较大,对搭建的系统进行了整体测试。在输入全反镜旋转、俯仰角度调节角度<0.3°时,系统相对误差小于5%,调节精度满足精确调节的实验要求。
4 结论
为了保障六束激光聚焦叠加并稳定精准地照射到靶面上,在天光一号装置上开展了适合其激光参数及光路特性的自动准直技术研究。研究发现,采用传统的光路自动准直方法,由于主光路光源的波长与引入的辅助光源的波长相差过大,造成光束传输路径无法精确重合。
本文建立了预放大器光路自动准直系统,实现了快速、高精度光束的调节,验证了自动准直方案的可行性,调节精度达到0.17 mm,系统相对误差小于5%,实现了快速、高精度光束调节的目标。本文为天光一号KrF准分子激光装置后期开展MOPA光路全自动化准直系统提供了可行的实验方案与思路。
猜你喜欢
阅读(科学探秘)(2022年5期)2022-06-07
小资CHIC!ELEGANCE(2021年18期)2021-07-28
奥秘(2021年3期)2021-04-12
中国眼镜科技杂志(2020年11期)2020-11-20
理科考试研究·初中(2017年5期)2018-03-07
中学生数理化·八年级物理人教版(2017年10期)2018-01-22
中国眼镜科技杂志(2017年14期)2017-07-24
红领巾·探索(2014年1期)2015-03-16
汽车维护与修理(2015年6期)2015-02-28
英语学习·新锐空间(2013年2期)2013-05-23
