
模态参数识别和输入整形相结合的抑振方法*
2019-06-24 10:25胡锡钦邹焱飚
振动、测试与诊断 2019年3期
李 琳, 胡锡钦, 邹焱飚
(华南理工大学机械与汽车工程学院 广州,510641)
引 言
自动化技术的发展促使工业机器人被广泛应用在生产制造领域,随着生产要求的提高,实现机器人高速高精度的运动变得尤为重要。然而,高速运动会使机械臂产生较大的残余振动,实际生产中,通常需要等到残余振动消失或者衰减到允许范围之后才能进行位置精度要求高的工序,这就很难满足生产的要求。为了消除这种振动带来的副作用,提高工作效率,研究人员进行了大量的研究工作。近年来,输入整形技术成为振动控制领域的研究热点。文献[1-3]对输入整形技术进行了深入的研究,分析了整形器的鲁棒性以及对模态参数的敏感性,并在不同应用实例中验证了其有效性。董明晓等[4-5]针对弹性机构中的单模态和多模态振动问题,提出将输入整形引入到比例-微分(proportion derivative,简称PD)反馈控制中,通过合理的设计控制器,使其具有较强的参数鲁棒性和抗外界干扰能力。赵志刚等[6]提出了改进型负输入整形和最优控制结合的方法,引入线性二次型调节器反馈以应对模型参数不精确的问题。贾鹏霄等[7]将PD自适应控制与输入整形技术相结合,考虑系统模型存在参数不匹配的影响,利用输出信息进行PD自适应控制器的设计,保证跟踪参考模型的输出以获得满意的性能。然而,这些方法都是以简化、理想化的动力学模型为基础,这使得获取到的模态参数与实际系统的模态参数不匹配。
鉴于在设计输入整形器时,整形器脉冲序列中各脉冲的幅值和作用时刻的求解要求精确的动力学模型,且对模型参数的变化很敏感,而采用鲁棒输入整形器虽然扩大了带宽,但却要消耗大量的调节时间。为此,既考虑到输入整形器对系统振动模态参数的敏感度很高,也考虑到输入整形器会带来延时,影响机器人的工作效率,笔者提出一种基于模态参数识别和无延时整形相结合的复合方法来抑制机械臂的残余振动。
1 输入整形原理
输入整形是将初始指令与特定的脉冲序列进行卷积,生成的整形指令作为控制系统运动的输入信号[6]。其基本原理可以由图1来描述,在t1=0时刻输入幅值为A1的脉冲信号,系统响应在图中用实线表示,为了抑制由第1个脉冲激起的振动,在t2=ΔT时刻输入幅值为A2的脉冲信号,其响应在图中用虚线表示。由线性系统的叠加性可知,两个脉冲引起的系统响应如图中点画线所示,当t≥ΔT时,两个脉冲激起的振动相互抵消,达到抑振的目的。
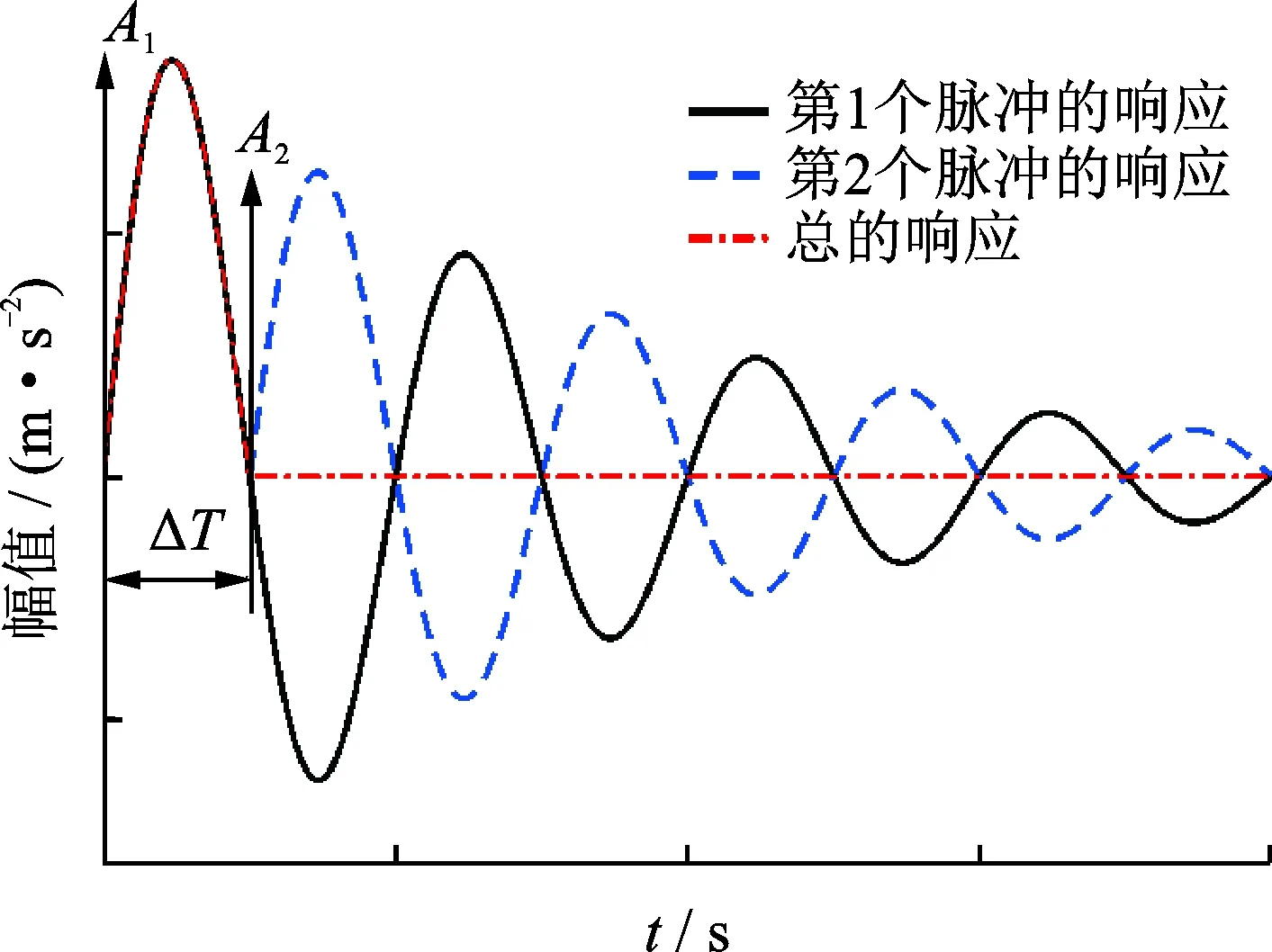
图1 输入整形法原理Fig.1 Principle of input shaping
下面通过二阶线性系统来引出输入整形器的设计过程,假设二阶线性系统的传递函数为G
(1)
其中:ωn为自然频率;ζ为阻尼比;k为增益。
二阶线性系统的单位脉冲响应为
(2)
假设整形器由n个脉冲组成,那么整形器可表示为
(3)
以包含n个脉冲的脉冲序列作为系统的输入信号,则系统响应为
V2cos(ωd(t-ti))]
(4)
(5)
(6)
其中:Ai,ti分别为第i个脉冲的幅值和作用时刻;tn为输入整形器的总长度。
对于某一确定的系统,其自然频率ωn、阻尼系数ζ是确定的,根据上述约束条件可以解出Ai和ti
(7)
其中
最简单的输入整形器是包含两脉冲的整形器,称之为ZV整形器,由式(7)可得其数学表示形式为
(8)

2 模态参数的识别
整形器的设计需要预先获知系统的两个模态参数:自然频率ωn和阻尼比ζ。传统的方法主要有3种:a.建立系统的动力学模型,通过求解动力学方程来获得[8-9];b.通过锤击法等进行模态实验获得[10];c.有限元分析法[11]。这3种方法都能得到系统的各阶模态,但不能直接确定在实际情况下起主要作用的模态,通常的做法是取第1阶模态或者前2阶模态来设计整形器。
笔者通过对机械臂末端的残余振动信号进行快速傅里叶变换(fast fourier transform,简称FFT),分析其主要模态,来识别系统的模态参数[12]。具体步骤如下:
1) 对采集到的残余振动信号进行FFT计算,绘制残余振动信号的功率谱;
2) 设定频谱幅度比较阈值Av和频率变化阈值ωv,筛选幅值大于Av的峰值频率ωi,再比较相邻的峰值频率ωi,若ωi+1-ωi<ωv,则当成同一阶模态频率,如此确定在系统振动中起主要作用的模态;
3) 根据步骤2中识别到的主振频率ωi,设置带通滤波器,对残余振动信号进行滤波,得到该模态下的振动时域信号;
4) 通过对数衰减法求解阻尼比[13]。
对数衰减法的计算原理如图2所示。
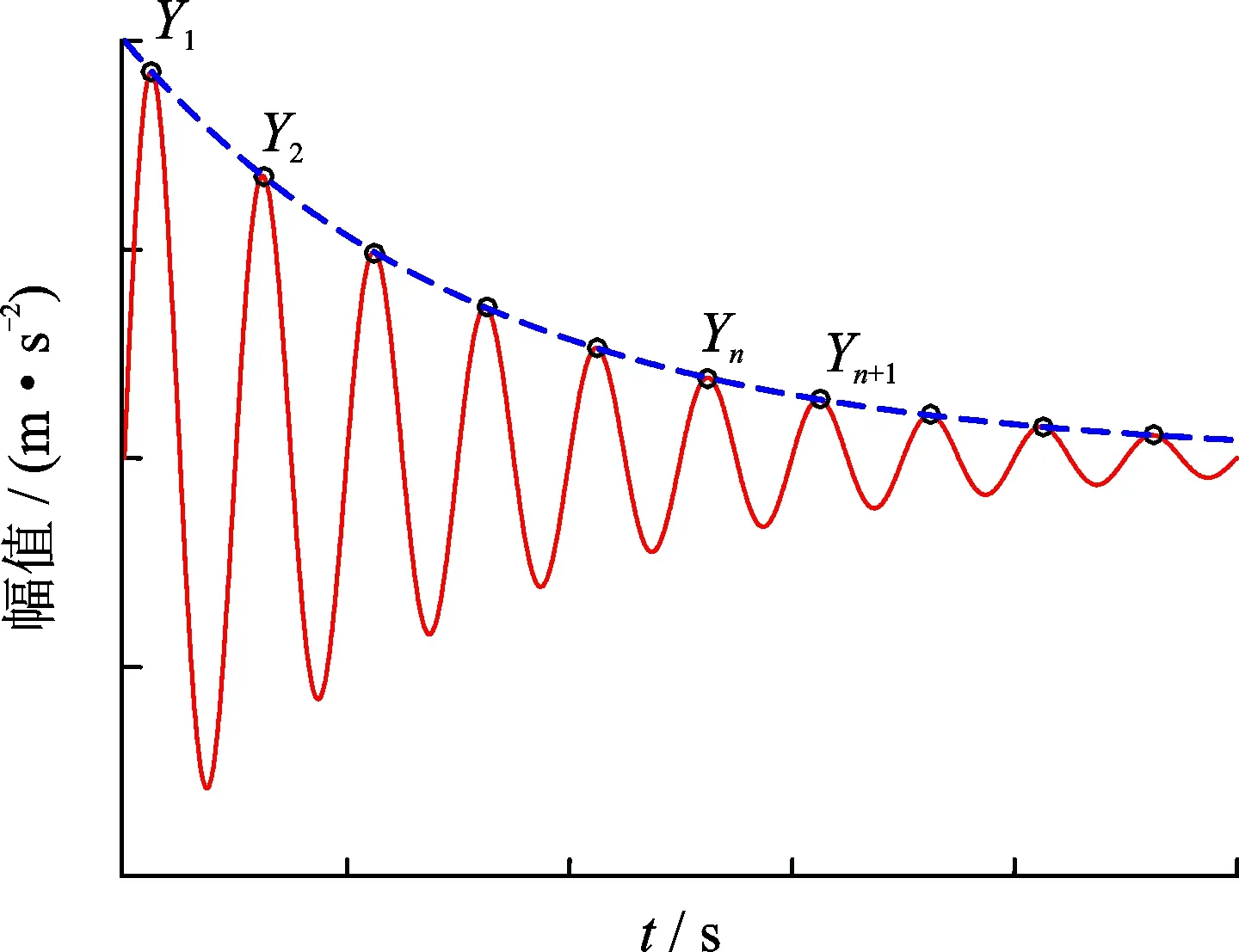
图2 对数衰减法原理Fig.2 Principle of logarithmic decrement method
由式(2)可知,第i阶模态下的振动信号为
(9)
其中:i为主振模态序号;N为主振模态的数量。
由式(9)可知,振动信号为衰减的正弦信号,其包络线为
(10)
设振动信号中两个连续的峰值为Yn和Yn+1,那么
为提高计算的准确率,可以选择多个峰值计算出阻尼比ζ之后再取平均值。
3 无延时整形的设计方法
传统的输入整形器会引入延时,如果采用鲁棒性强的整形器,就不得不增加整形器中脉冲的数量,这将使延时更加严重。为了消除延时带来的副作用,笔者采用一种对输入轨迹进行加速设计实现无延时的方法,具体设计思路如下。
1) 典型的整形器可表示为
其中:n为脉冲数;tn为整形器的长度,对输入轨迹整形后会使得轨迹时长增加tn。
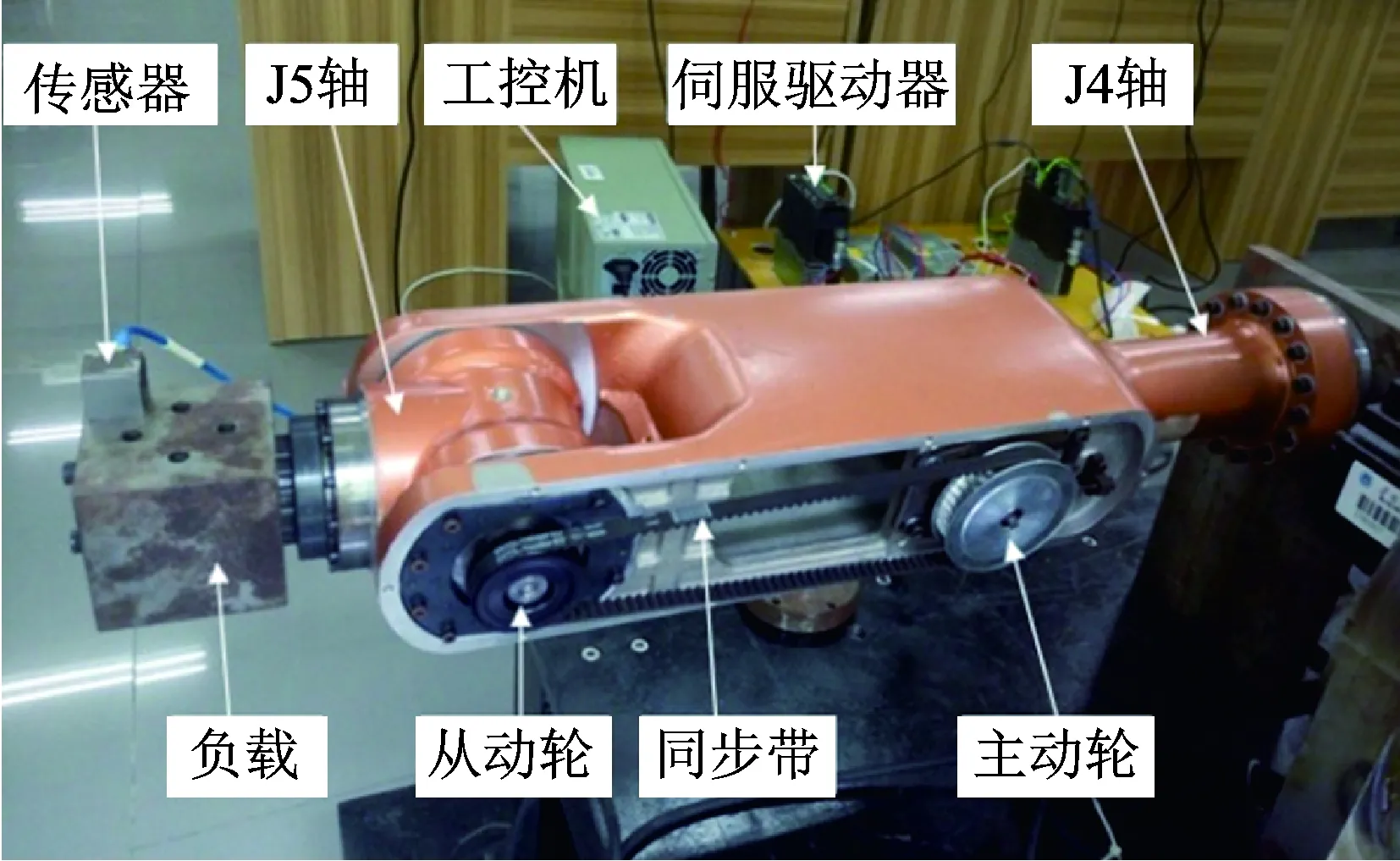
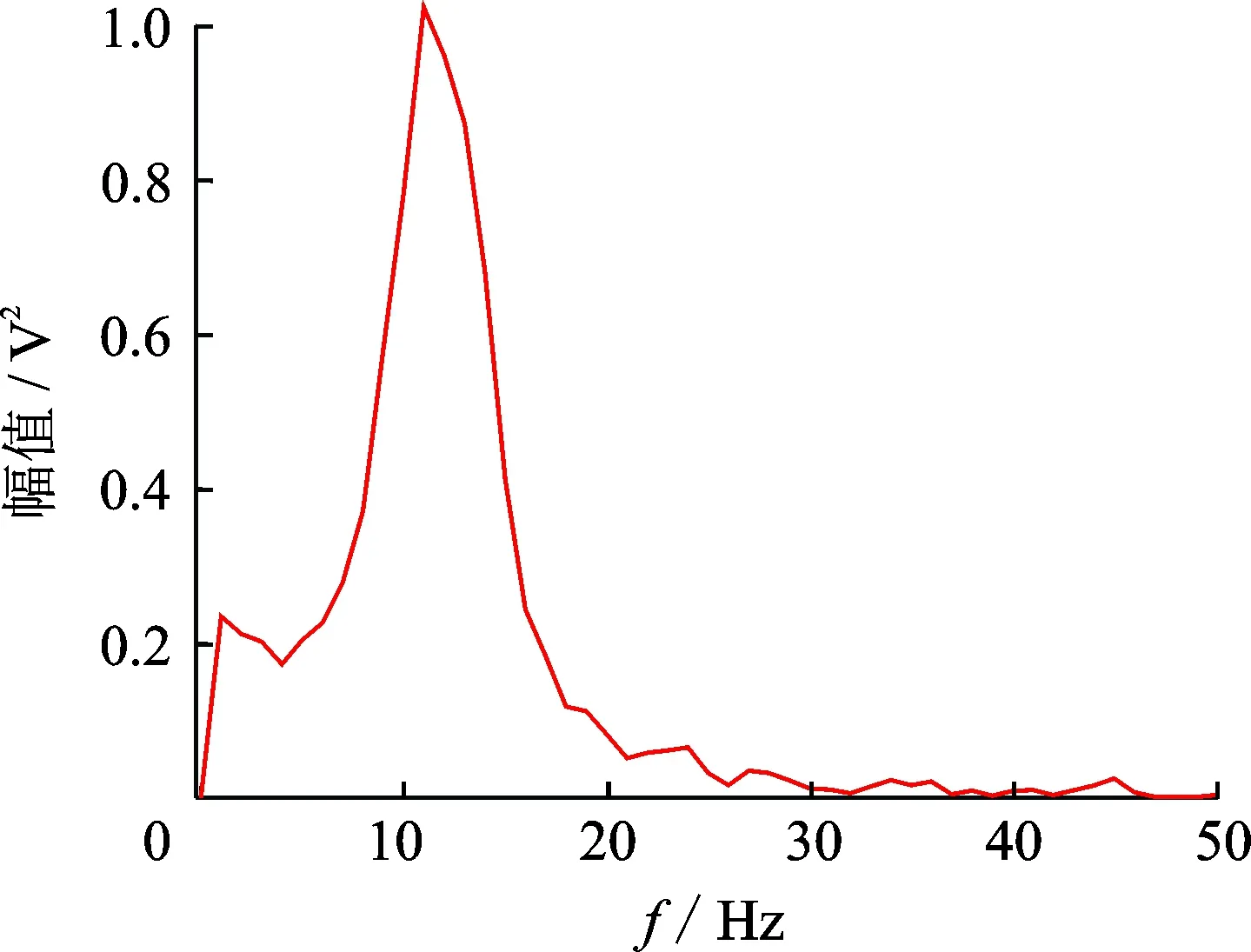
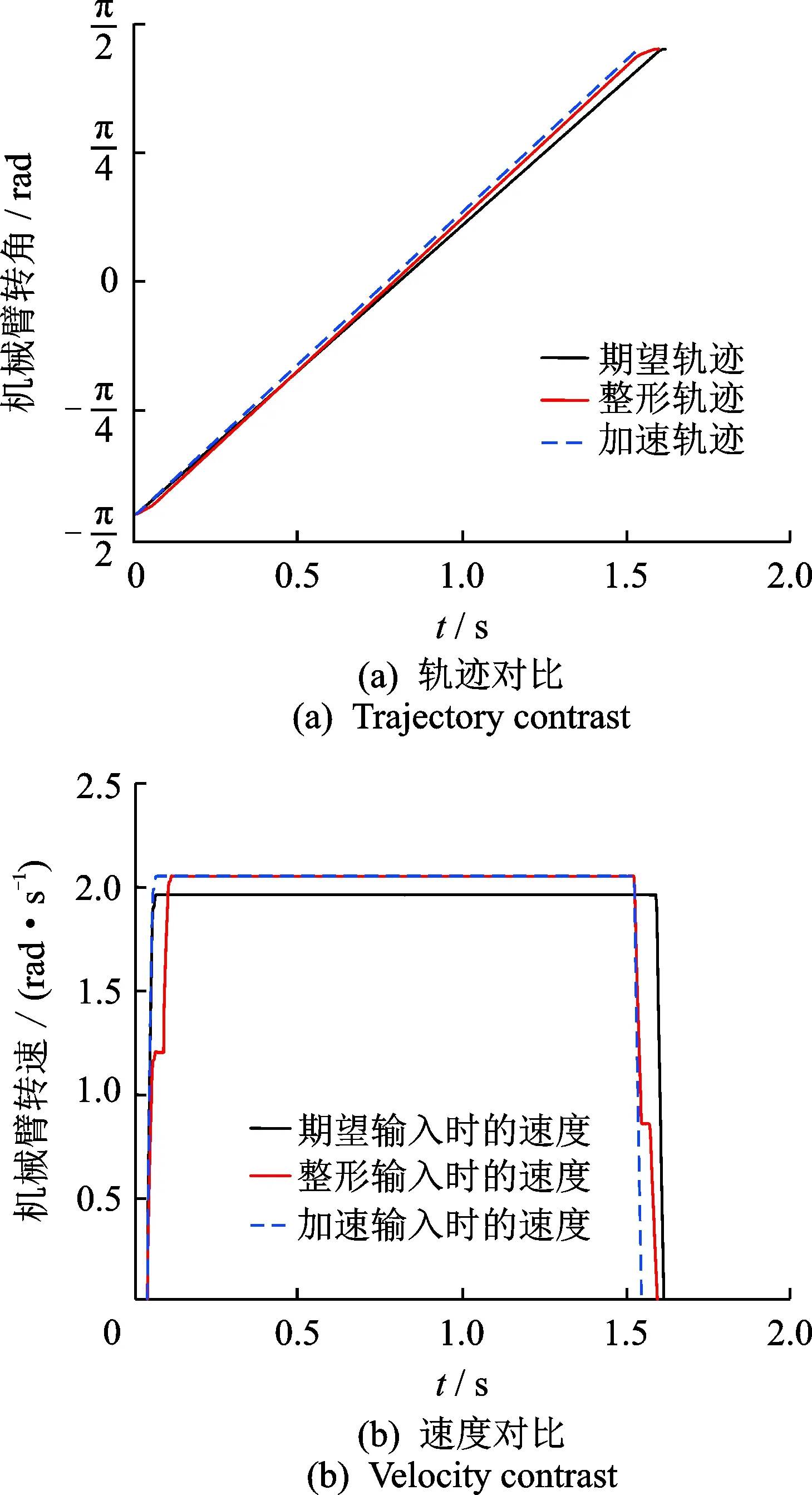
2) 对期望的输入轨迹S(t)(t∈[0,T])进行加速设计得到Sacc(τ)(τ∈[0,T-tacc]),即按时间变量对轨迹均匀加速,使轨迹时长缩短tacc。其中tn≤tacc 则Sacc(τ)=Sacc(kt)=S(t),t∈[0,T]。如此,确保加速设计后的轨迹与原轨迹保持形状不变,即轨迹曲线的各阶导数的连续性特性不变,而只改变运行速度。 3) 对加速后的轨迹Sacc(τ)进行整形,得到整形后的轨迹SIS=fIS*Sacc。假设整形器包含n个脉冲,则整形后的轨迹为 (t∈[0,T-tacc+tn]) S'acc(t)是对Sacc(t)的扩展,即 其中:u(t)为单位阶跃函数 其目的是确保整形后机械臂能运行到与未整形时同样的位置,即机械臂运动的起止点相同。 比较原期望的轨迹s(t),t∈[0,T]与整形后的加速轨迹SIS(t),t∈[0,T-tacc+tn]可知,由于tn 为了验证上述方法的有效性,搭建了单自由度机械臂的实验平台,并进行了间歇-间歇实验来测试抑振效果。 实验平台如图3所示,机械臂实体采用广州数控设备有限公司生产的六自由度工业机器人的J4和J5轴,其中J4轴固定在基座上,J5轴由交流伺服电机通过同步带驱动。驱动模块采用台达公司的ASD-A2 Ether-CAT通讯型交流伺服驱动器和ECMA-CA0604SS型交流伺服电机,电机额定功率为400W,额定转速为3kr/min。传感器采用的是德国KISTLER公司的三维加速度传感器,测量范围为-300 ~ +300m/s2。信号处理模块为华研 IPC-510嵌入式工控机,配置主频3.4GHz的Intel i7-3770四核处理器。实验中输入控制信号为机械臂的位移轨迹,输入指令间隔为1ms,模态参数识别的计算过程在Matlab中完成。 图3 抑振测试实验平台Fig.3 Experiment platform for vibration suppression control 本实验中输入轨迹为典型的S型曲线,机械臂按照规划的轨迹运行,通过加速度传感器采集机械臂末端残余振动的电压信号,将原始振动信号进行低通滤波,滤除高频噪声,再进行快速傅里叶变换得到的功率谱如图4所示。 图4 振动信号功率谱Fig.4 Power spectrum of residual vibration 根据前述参数识别法,本实验中系统的主振频率为11Hz,此处分别用波峰值和波谷值进行对数衰减法求解阻尼比,再取平均值以提高准确性,结果为ζ=0.11。 根据4.1节中所得模态参数设计输入整形器,由式(8)可知ZV整形器的数学表达式为 根据前述无延时设计的方法,对原始期望轨迹进行整形,结果如图5所示。由图5(a)可知,加速设计后的轨迹与原期望轨迹形状相同而时长缩短,整形轨迹较贴合期望轨迹。由图5(b)可知,整形后实际的运行时间为1.6s,而预先期望轨迹的运行时间为1.62s,这说明通过对轨迹加速设计可以实现无延时的目的。 图5 无延时设计Fig.5 Zero time delay method 首先令机械臂按照期望的轨迹运行,通过加速度传感器采集末端的残余振动信号,如图6(a)所示。起始时间为期望轨迹运行完的时刻,总时长为1s。 图6 抑振效果Fig.6 Effect of vibration suppression 设整形前后残余振动信号分别为y1(t)和y2(t)。为方便讨论,此处将振动数据按整形前残余振动的最大幅值max(|y1(t)|)做归一化处理(量纲为1) 其中:max(|y1(t)|)=12.7m/s2。 考虑到噪音以及加速度传感器可能存在的信号波动的影响,设定|y1*(t)|≤0.2时(图中用虚线标出),认为振动已经稳定下来,则整形前系统的稳定时间为0.118s。 图6(b)所示为机械臂按无延时整形轨迹运行时,从加速度传感器采集到的振动信号y2*(t)。起始时间为机械臂运动停止时刻,总时长为1s。此处仍按整形前振动的最大幅值max(|y1(t)|)做归一化处理(量纲为1) 整形后系统残余振动的最大幅值仅为整形前的31%,稳定时间为0.043 s。 对比整形前后机械臂的运行时间和稳定时间,如表1所示。其中总时间为运行时间(即轨迹时长)与稳定时间之和,残余振动的稳定时间由整形前的0.118 s缩短到整形后的0.043 s,稳定时间大大缩短,说明输入整形器设计合理,抑振效果非常理想。 表1 实验结果对比 利用输入整形技术抑制机械系统的残余振动时,通常难以获取系统的模态参数,致使参数不匹配,从而影响抑振效果。同时,输入整形器不可避免地给系统带来延时,影响工作效率。笔者提出了一种基于模态参数识别和无延时输入整形相结合的复合方法来抑制机械臂的残余振动,并且在单自由度机械臂系统上进行实验以验证其有效性。实验结果显示,整形后机械臂末端残余振动的最大振幅降低到整形前的31%,稳定时间由整形前的0.118 s缩短到整形后的0.043 s,表明通过该方法识别到的振动模态参数准确性较高,设计的输入整形器合理。同时,机械臂的运行时间由1.62 s降低为1.6 s,说明无延时设计方法有效地补偿了输入整形器所带来的延时,运动控制的总时间由整形前的1.738 s降低到1.643 s,保证了机器人的工作效率。
4 实 验
4.1 模态参数识别
4.2 整形器设计
4.3 抑振效果


5 结束语
猜你喜欢
有色设备(2021年4期)2021-03-16读友·少年文学(清雅版)(2020年4期)2020-08-24读友·少年文学(清雅版)(2020年3期)2020-07-24电子制作(2019年14期)2019-08-20现代装饰(2018年5期)2018-05-26中成药(2017年12期)2018-01-19中国三峡(2017年2期)2017-06-09电子制作(2017年19期)2017-02-02对联(2015年22期)2015-06-11弹箭与制导学报(2015年1期)2015-03-11
