喷涂机器人伺服系统建模与仿真
2019-06-24 06:23鲁凤明谭晓东
科技创新与应用 2019年13期
关键词:仿真分析
鲁凤明 谭晓东

摘 要:伺服系统常用于机器人的关节机构,由于转矩变化和负载扰动等因素的影响,需要伺服系统有很好的跟踪精度和控制性能。为了使伺服系统达到理想性能,使用理想的控制策略与控制方法,文章建立了电流环、速度环、位置环控制的伺服电机仿真模型,仿真实验结果表明:使用基于位置控制的伺服系统后,位置跟踪误差小,提高了电机的控制精度,验证了系统设计的正确性和可行性,为系统的软硬件设计及实验分析奠定基础。
关键词:喷涂机器人;伺服;仿真分析
中图分类号:TP242.3 文献标志码:A 文章编号:2095-2945(2019)13-0108-03
Abstract: Servo system is often used in the joint mechanism of robot. Due to the influence of torque change and load disturbance, servo system is needed to have good tracking accuracy and control performance. In order to make the servo system achieve ideal performance and use the ideal control strategy and control method, the servo motor simulation model of current loop, speed loop and position loop control is established in this paper. The simulation results show that the position tracking error is small, the control accuracy of the motor is improved, and the correctness and feasibility of the system design are verified by using the servo system based on position control. It lays a foundation for the software and hardware design and experimental analysis of the system.
Keywords: spraying robot; servo; simulation analysis
引言
动车车体喷涂机器人主要是对动车车体进行腻子喷涂,由于车体尺寸非常大,普通的喷涂机器人尺寸并不直接适用于车体喷涂,需要重新设计一种末端执行器工作空间足够大的自动喷涂机器人。机器人工作时需增设上升下降轴和左右移动轴两个轴,以实现车体上下弧度的垂直喷涂,在机器人外部加设Y轴方向长距离驱动装置,伺服系统驱动上升下降轴和左右移动轴两个轴按上位机规划好的轨迹运动到指定位置,实现整个车体的喷涂。而车体对机器人的喷涂质量要求較高,机器人末端执行器位置控制精度将直接影响机器人喷涂精度,所以对伺服系统定位精度要求严格。为了保证喷涂装备能达到规定的精度的要求,喷涂装备的伺服驱动系统的定位精度一定要合理,使其误差小于规定要求。而永磁同步电机伺服驱动系统的性能直接影响机器人关节运行过程中的性能,从而影响到最终的定位精度。所以,以机器人关节伺服驱动系统为例,建立永磁同步电机伺服系统建模数学模型,对整个伺服系统仿真,确定合理的参数,从而保证整个系统能够达到控制需求。
1 永磁同步电机伺服系统建模
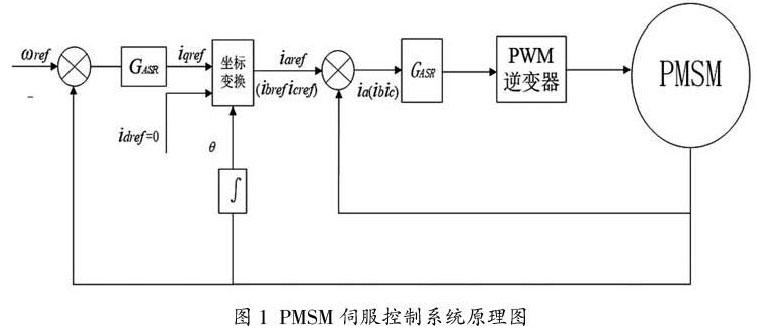
交流伺服系统通常是由电流环、速度环、位置环构成的三闭环系统[1]。在设计中首先确定电流环结构,然后将电流环作为速度环的一个结构,接着是位置环。PMSM伺服控制系统原理图如图1所示。
1.1 电流环设计
在伺服系统控制中,电流环是一个重要的环节,电流环位于伺服控制系统的内环,主要实现d、q轴电流的快速并准确跟随及电流限幅,就可以快速响应转矩的变化,所以电流的反馈必不可少,电流环的采样频率远高于速度环的采样频率。电流环主要由电流调节器、逆变器以及电流检测装置组成。
1.3 位置环设计
位置环是伺服控制系统的最外环,主要实现输出位置信号对位置指令的复现,它实现伺服电机的定位,由于位置环的特殊性, 一般不能出现超调, 故伺服控制系统的位置环控制器一般采用P控制。
因为位置伺服控制系统是高阶动态系统,所以必须对位置调节器降阶,系统速度环的响应远快于位置环,所以可以将速度环近似等效成一阶惯性环节。位置环结构框图如图4所示。
2 仿真验证
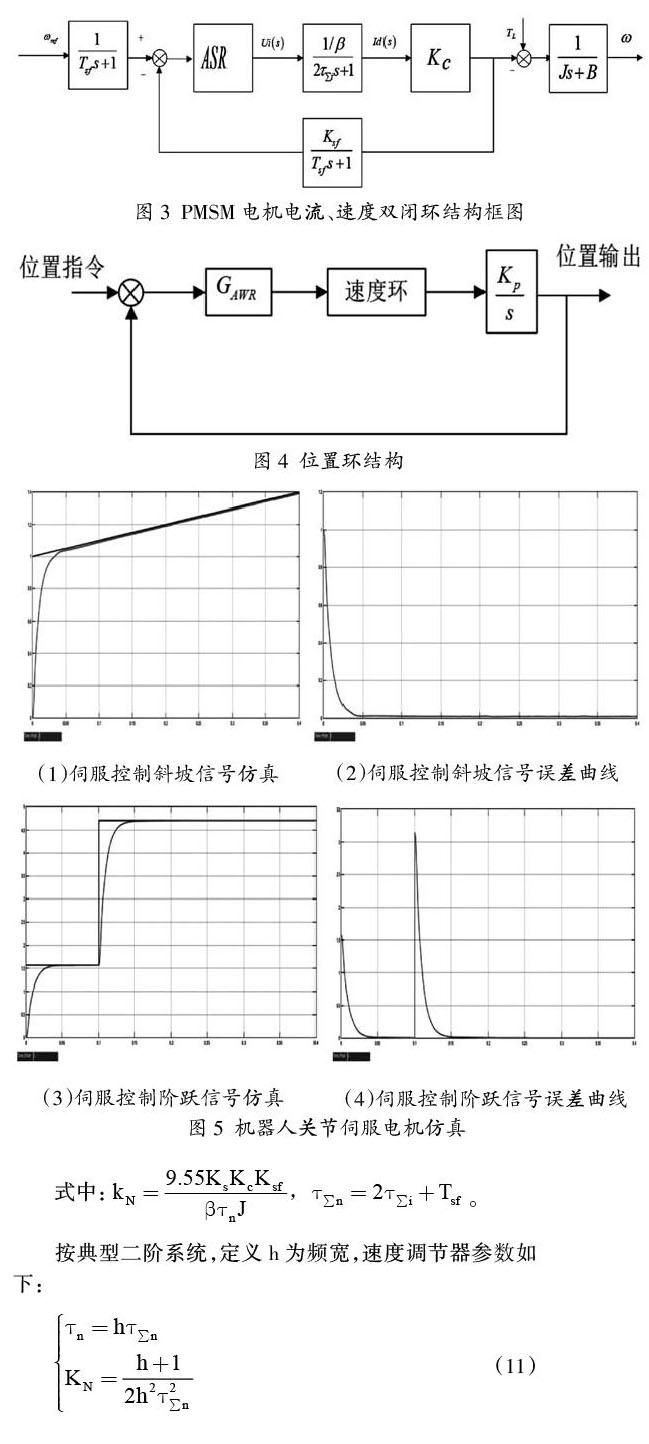
在交流伺服三闭环控制系统中,位置环采用比例控制,速度环和电流环采用比例积分控制。伺服控制系统采用永磁同步电机,功率1.5kW,额定电流9.3A,额定转矩4.8N·m,定子电阻0.836Ω,定子电感5.13mH,额定转速3000r/min,使用17位绝对编码器作为位置反馈。
在Matlab/Simulink中使用阶跃信号和斜坡信号对控制系统进行位置指令的跟踪仿真,结果如图5所示。从图5中可以看出,使用PID控制可以使控制系统的指令跟踪误差很小,满足机器人定位要求。
3 结论
本文在先确定使用PI调节的电流控制器,在此基础上设计出采用PI调节的速度控制器,最后基于电流闭环、速度闭环以及方法进行机器人交流伺服系统的定位控制。通过仿真验证了证明了在使用电流环、速度环、位置环控制的基础上,控制系统可以有效提高系统的快速跟踪性能,能够实现对交流伺服系统的准确定位控制,同时保证伺服系统快速响应,说明位置控制在实际的机器人控制中非常重要,可以用于点到点以及插补等轨迹规划中。
参考文献:
[1]陈鹏展.交流伺服系统控制参数自整定策略研究[D].华中科技大学,2010.
[2]舒志兵,周玮.交流伺服运动控制系统[M].清华大学出版社,2006.
[3]胡静.基于多轴机器人的自适应伺服系统研究[D].中国航天科工集团第二研究院,2017.
[4]庄丽.机器人系统中交流伺服电机控制研究[J].制造业自动化,2015,04(37):61-83.
[5]朱中卫.基于DSA的伺服系统速度环建模与PI参数整定[D].广西大学,2014.
猜你喜欢
科学与财富(2016年18期)2016-12-22
中小企业管理与科技·下旬刊(2016年10期)2016-11-18
中小企业管理与科技·上旬刊(2016年10期)2016-11-15
科技视界(2016年15期)2016-06-30
科技视界(2016年8期)2016-04-05
科技视界(2016年7期)2016-04-01
中国市场(2016年8期)2016-03-07
光学仪器(2015年1期)2015-07-30