
基于多传感器测量的航天器舱段自动对接位姿调整方法
2019-06-26 09:02陈冠宇成群林张解语洪海波何军
北京航空航天大学学报 2019年6期
陈冠宇,成群林,*,张解语,洪海波,何军
(1.上海航天精密机械研究所,上海201600; 2.西安电子科技大学 机电工程学院,西安710071)
舱段对接是影响航天器整体质量的关键因素之一,目前国内仍大多采用人工方式,效率低、精度差、可靠性难以保证,难以满足迫切的市场需求。因此,研发整套的高效、高精、柔性的自动舱段对接系统迫在眉睫[1-3]。在舱段自动对接过程中,需要对舱段的位姿进行精确、快速地测量以得到其相对位姿误差,并针对该误差进行有效的调整。舱段位姿测量和调整是保证对接效率、精度和质量的关键,具有重要的研究意义和应用价值。
目前,国内外已有多家机构对位姿的测量和调整方法进行了研究。大多数工程案例[4-7]都采用激光跟踪系统(Laser Tracker System,LTS)作为位姿测量的手段,该方法测量精度高,测量范围广,在大型舱段如飞机[8]的对接过程中应用较多。此外,金贺荣等[9]将双目视觉测量技术应用于航天器的水平对接过程,该方法通过双目相机测量并匹配被测舱段表面预先喷涂的靶点,完成对接舱段位姿的测量。但以上2种技术均需要在被测物表面安装或喷涂相应的靶标,因此增加了人工成本,降低了生产效率,对于导弹等需成批生产的航天器来说,该问题极大地限制了此类技术的应用。此外,安装或喷涂靶标时并不能保证靶标位置达到完全准确,因此可能会引入新的误差。除了以上2种技术,也可通过机器视觉识别被测物几何基元的方式完成对零件位姿的测量[10-11],或通过匹配相应的 CAD模型完成测量[12],但零件的实际尺寸相对CAD模型具有差异,可能引入误差,鲁棒性较差。随着测量技术的发展,激光轮廓传感器——亦即线结构光三角法的出现为该问题提供了新的解决思路,如 Nguyen和Lee[13]通过激光轮廓传感器对焊缝进行扫描,提取相应的几何特征和参数,对焊接质量进行评价。Rahayem和Kjellander[14]将机械臂和激光轮廓传感器结合使用,进行零件的参数测量和计算,并根据激光轮廓传感器的测量特性研究了回转体椭圆轮廓线拟合的精度问题。Schalk等[15]对线结构光三角法获得的截面进行了分析。以上研究大多集中在物体形貌特征的测量,对位姿测量问题涉及较少,但其高精度、高抗干扰能力的特点使其具有解决该问题的潜质,如 Bellandi等[16]将工业相机和激光轮廓传感器共同安装于机械手的末端构成机器人手眼系统,对待测物体进行识别并确定其位置,完成机器人的抓取动作,但该方法不适用于本文所述的航天器对接情景。
本文提出了一种基于多传感器协同测量的舱段位姿估计和调整方法,该方法采用激光轮廓传感器和CCD图像传感器对舱段进行测量,结合了激光轮廓传感器的可靠性和机器视觉的灵活性,通过传感器对舱段进行扫描,测得其除自转角外5个自由度的位姿,并通过机器视觉确定舱段绕轴线的转角。在此基础上,采用了改进的最小二乘法对被测舱段位姿进行求解,结果将反馈至控制系统进行调姿和对接。
1 舱段位姿多传感器协同测量
1.1 测量原理
任意状态的舱段位姿可以用六维向量(XC,YC,ZC,α,β,γ)来唯一表示,如图 1所示。其中,XC、YC和ZC为舱段端面中心点OC在标定架坐标系O0(实际测量坐标系)中的位置,β和γ分别为舱段轴线在X0O0Y0和X0O0Z0平面中投影的倾斜角,α为舱段绕自身轴线的自转角。

图1 舱段位姿示意图Fig.1 Schematic diagram of cabin position and pose
对于舱段对接来说,不同舱段间的位姿偏差主要为沿 Y0、Z0轴的平移偏差 Δy、Δz以及绕 X0、Y0、Z0轴的旋转偏差 Δα、Δβ和 Δγ。一般来说,舱段对接采用间隙配合,要想成功对接,舱段之间的位姿误差不能高于0.1 mm。因此,整个测量系统的设计精度为0.1 mm,重复精度不低于0.03 mm。通常来说,激光测量能够进行三维测量,精度高、可靠性好,但效率较低,而视觉测量速度快、灵活性强,但往往用于二维场合,并受到视场的限制。为了满足高精度、高效率位姿三维测量的需求,将采用激光轮廓扫描与工业相机局部拍摄协同的测量方式,如图 2所示,即 Δy、Δz、Δβ和 Δγ通过激光轮廓传感器测得,Δα通过工业相机测得。激光轮廓传感器本质上是一种基于光学三角测量法的二维激光测距传感器,可以获得激光扇面内的光带上若干离散点相对于传感器的深度信息,通过扇面移动可以拟合出舱段轴线及端面位姿信息。工业相机可以通过拍照获取销孔位置,通过图像处理可以测出不同舱段绕轴自转的角度与目标角度之间的差异。多传感器协同测量既体现了激光轮廓传感器测量的可靠性,又发挥了机器视觉测量的灵活性。

图2 舱段位姿多传感器测量系统Fig.2 Cabin section position and pose multi-sensor measurement system
1.2 位姿求解算法
1.2.1 轴线及端面位姿求解
根据激光轮廓传感器获得的物体轮廓点云数据进行求解就可以得到被测物的位姿。扫描过程中,同时记录传感器的X0坐标,令 X0=xi,可取得若干平行平面上的轮廓数据,即一组相似的椭圆圆弧链(L1,L2,…,LN),如图 3所示。

图3 通过若干椭圆圆弧估计轴线参数的过程示意图Fig.3 Schematic diagram for estimating axis parameters through several elliptical arcs
这些轮廓数据从微观上来看为一系列离散的点,因此,对于每个圆弧链(L1,L2,…,LN),取其具有最大 Y0坐标的点(Pb1,Pb2,…,PbN),根据几何关系可知,(Pb1,Pb2,…,PbN)为圆柱的一条母线,因此其倾角即圆柱轴线的倾角。对其在平面X0O0Y0上的投影通过最小二乘拟合算法进行拟合,就可以求得 β。同时,对椭圆圆弧链进行拟合,所得圆心记为(C1,C2,…,CN),对其在平面X0O0Z0上的投影通过最小二乘拟合算法进行拟合,就可以求得γ。再根据β和γ的值对舱段进行调平。调平后,再次采用激光轮廓传感器进行扫描,得到椭圆圆弧(L′1,L′2,…,L′N)。此时,β和γ约等于零,因此(L′1,L′2,…,L′N)接近正圆圆弧,对其进行正圆 拟合,得 到对应圆 心 (C′1,C′2,…,C′N),进行空间直线拟合,得到零件轴线的方向向量以及其与平面Y0O0Z0的交点。根据投影关系可知,此时端面在平面 X0O0Z0上的投影为一条直线,因此可对该直线进行拟合,得到端面中心X0的坐标XC,根据轴线的空间位姿,计算端面中心的坐标(XC,YC,ZC),平移完成对零件进行位姿测量和调整。
对椭圆圆弧(L1,L2,…,LN)进行最小二乘拟合选取目标函数为

式中:a为椭圆一般方程的六维系数向量,满足a=[A,B,C,D,E,F]T;M为每个椭圆上拟合点的个数;G(xi,yi,a)为椭圆方程的一般形式,即

对式(2)的求解方法较多,Rahayem等[17]对各种拟合算 法 进 行 了讨论,并 认 为 由 Halírˇ[18]和Ahn[19]等提出的改进直接最小二乘拟合算法在效率、准确度和抗噪等方面性能优异。该算法是对Fitzgibbon等[20]提出的椭圆直接最小二乘算法的改进,避免了约束矩阵的奇异性[21-23]给计算带来的不便,相比其他迭代算法效率更高。
该算法中,最小二乘可表述为一个最优化问题:

式中:a1和a2为对应椭圆代数方程中的系数向量,其中 a1=[A B C],a2=[D E F];参数矩阵D1和D2分别为

其中:(xi,yi)为拟合点的坐标。对于椭圆代数拟合问题来说,约束条件4AC-B2=1可写作如下矩阵形式:

其中:R为一个3×3的约束矩阵,即

在式(5)情况下,式(2)即是一个约束最优化问题,根据文献[18]有

式中:λ为拉格朗日乘数。对式(7)进行求解,可得椭圆一般方程的6个系数A~F,进而可解出椭圆的几何参数,即椭圆长、短半轴 a、b,椭圆的圆心坐标(xC,yC)以及椭圆的旋转角 φ。再对圆心(C′1,C′2,…,C′N)进行空间直线拟合,选取目标函数为
式中:拟合的空间直线与平面 Y0O0Z0的交点为P0(0,y0,z0),该空间直线的一个方向向量为 T=(1,p,q)。对式(8)进行求解,可得直线与平面Y0O0Z0的交点 P0(0,y0,z0)以及直线的一个方向向量T=(1,p,q)。根据该方向向量求出对应轴线的姿态角γ,同样的,通过拟合母线的方式得到轴线姿态角β。由于舱段调平后端面在平面X0O0Z0和 X0O0Y0上的投影为一条直线,因此可通过图形学的方式求取端面中心XC,根据轴线的空间位姿[24]计算端面中心的坐标(XC,YC,ZC)。
1.2.2 销孔角度偏差求解
工业相机测量目的是测出舱段实际绕轴自转的角度与目标角度之间的差异,即实现舱段端面1上定位孔和与之对应端面2上定位销位置(x3,y3,z3)、(x4,y4,z4)以及销和孔之间夹角 Δα测量,并驱动旋转机构补偿该误差。以舱段端面O1为例,如图4所示,采用工业相机对孔进行拍摄,经图像处理测得孔圆心在标定板坐标系O3X3Y3Z3中的坐标是(x33,y33,z33)。为了方便与端面O2上的销进行比对,需要将孔坐标转换到世界坐标系O0X0Y0Z0中,即

同理,采用另一台CCD相机对端面2进行拍摄。若端面 O2上的标定板坐标系是 O4X4Y4Z4,则销在世界坐标系O0X0Y0Z0中的坐标为

经过姿态的多次测量和调整,当两舱段轴线的对中误差小于装配公差时,就认为两舱段轴线已经调成水平,此时由激光轮廓传感器测得的端面 O1和端面 O2的圆心坐标分别为(x1,y1,z1)和(x2,y2,z2),则孔和销之间的夹角为

综上,通过以上步骤,可分别求出舱段轴线的3个姿态角α、β和 γ,以及端面圆心的空间坐标(XC,YC,ZC)。考虑到最小二乘法对离群值的敏感性,可通过 M-估计[19,25]对以上最小二乘拟合算法的鲁棒性进行增强。
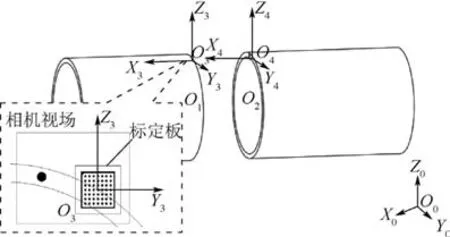
图4 舱段端面销、孔位置测量原理Fig.4 Principle for measuring position of cabin end face pin and hole
2 舱段位姿调整
舱段位姿调整机构如图5所示,每个舱段采用2个托架支撑,舱段自动对接平台通过一套调姿托架(含2个托架)与一套基准托架(含2个托架)来实现舱段对接过程的协同调姿,2个基准托架用于托举第一段舱段,作为对接基准,2个调姿托架托举待对接的舱段,可实现舱段偏摆、俯仰以及绕轴线旋转3种姿态调姿,与基准舱段完成对接,托架具有一定柔性,用于补偿对接误差以完成对接。详细的舱体位姿测量及调整流程如图6所示。首先,通过激光轮廓传感器测得舱段倾角β、γ,并驱动调姿平台沿 Y0、Z0方向运动,将舱段调平;其次,通过激光轮廓传感器测量拟合出舱段前端面的中心位置(XC,YC,ZC),再次驱动调姿平台沿Y0、Z0方向运动,将需要对接的舱段调整到同一高度。接下来,采用工业相机对舱段对接销、孔位置进行拍照,获取角度偏差并驱动舱体自转。只要销、孔位置达到装配公差,就驱动舱段沿X0方向移动XC距离,完成对接。需要说明的是,对接的2个舱段,一个为基准舱段,只需要执行流程中的步骤①~④即可,另一个为对接舱段,以基准舱段为基准进行姿态调整和对接。

图5 舱段位姿调整机构原理图和设计图Fig.5 Schematic diagram and design drawing of cabin position and pose adjustment mechanism

图6 位姿测量调整流程图Fig.6 Position and pose measurement and adjustment flowchart
3 实验验证与分析
项目研制的舱段自动对接装置如图7所示,位姿测量系统采用了Gocator 2350激光轮廓传感器,该传感器测量范围400 mm,视场FOV为158~365 mm,Z方向分辨率为0.019~0.060 mm,X方向分辨率为0.15~0.3 mm,视觉系统采用2套大恒MER-1810-21U3C工业相机,分辨率为4 912像素×3 684像素,像素尺寸为1.25μm×1.25μm,分别配备 M2514-MP2百万像素定焦镜头,焦距为25 mm。系统采用了 Holcon机器视觉软件对视觉系统进行标定及二维测量图像处理。因此,该配置完全满足了舱体位姿测量的精度需求。

图7 舱段自动对接平台Fig.7 Cabin automatic docking platform
对舱段进行位姿测量、调整及对接实验,首先采用激光轮廓传感器对舱体进行扫描,扫描获取的图像及处理结果如图8所示。实验中,分别对直径为125、200和340 mm 3种舱段进行了测量,每个舱段测量3次,并采用第2节的位姿求解方法,求得 XC、YC、ZC、β和 γ的绝对测量误差以及重复误差,如表1所示。可以看出,该测量系统远远满足了绝对测量误差0.1 mm,重复测量误差0.03 mm的要求。
采用激光轮廓传感器进行一次测量后,将位姿求解结果反馈到控制系统中进行位姿调整,调整后再采用激光轮廓传感器进行测量,某型号航天器调整前后的测量结果如表2所示。可以看出,通过一次调整,XC、YC、ZC、β和 γ的位姿已经满足对接的要求。在保证测量精度的前提下,一次扫描时间在30 s以内,也能满足快速测量的要求。

图8 激光轮廓传感器扫描及处理结果Fig.8 Laser profile sensor scanning and processing results

表1 舱段位姿测量误差Tab1e 1 Measurement error of cabin position and pose

表2 各舱段调整前后位姿数据Tab1e 2 Each cabin position and pose data before and after adjustment
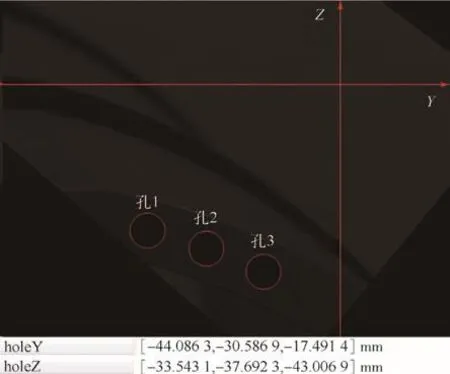
图9 舱体对接孔位置图像处理结果Fig.9 Image processing results of cabin docking hole position
在此基础上,采用经过标定的大恒相机对舱段端面上的3个孔的两两夹角进行测量,测量和图像处理结果如图9所示。为验证孔位测量的精度,引入API(美国自动精密工程公司)激光跟踪仪对相机拍照测量的精度进行验证,相机测量结果与API激光跟踪仪的测量结果进行比对,如表3所示。可以看出,相机和API激光跟踪仪夹角测量最大的误差为0.015 29°,满足了测量的精度要求。
采用相机进行一次测量后,将角度偏差求解结果反馈到控制系统中进行调整,调整完后再进行测量,调整前后的测量结果如表4所示。可以看出,通过一次调整,对接角度偏差Δα已经满足对接的要求。在此基础上,经过多次实验验证,3个舱段均能顺利完成对接,对接成功率为100%。此外,该系统将对接时间从原来手工操作1 h缩短至10 min,极大地提高了航天器舱段对接的效率。

表3 舱段孔之间夹角测量Tab1e 3 Measurement of ang1e between cabin ho1es (°)

表4 调姿前后相邻舱段相对自转角测量数据Tab1e 4 Re1ative segment ang1e measurement of adjacent cabins before and after posture adjustment
4 结 论
本文针对舱段自动对接装配中的位姿测量及调整问题,提出了一种基于多传感器测量的舱段测量及位姿调整方法:
1)该方法采用了激光轮廓传感器和CCD图像传感器对多个舱段的位姿分别进行测量,并采用改进的最小二乘法对被测舱段位姿进行求解,位姿求解结果将反馈至控制系统中进行调姿和对接。
2)实验结果表明,舱段位姿测量及调整精度满足了对接需求。该方法有效提高了自动对接系统的精度、效率和稳定性,提高了装配一致性,满足航天器舱段自动对接的要求。
3)多传感器测量技术对航天器舱段自动对接进行了具有重要意义的探索,具有广阔的推广应用前景。
猜你喜欢
橡塑技术与装备(2022年10期)2022-10-03
装备环境工程(2022年4期)2022-05-06
太空探索(2022年3期)2022-03-28
国际太空(2021年8期)2021-11-05
云南画报(2021年12期)2021-03-08
导弹与航天运载技术(2020年1期)2020-03-27
少林与太极(2020年7期)2020-02-04
中国建筑金属结构(2018年6期)2018-08-31
意林·少年版(2018年23期)2018-01-05
科技创新导报(2016年29期)2017-03-15
