
基于PSD三角测距的车辆避障系统设计
2019-07-16 03:17陈龙彪谌雨章邹鹏
电脑知识与技术 2019年14期
关键词:障碍物
陈龙彪 谌雨章 邹鹏

摘要:针对目前市面上出现的大部分新型智能避障系统结构复杂、制造难度高、制造成本高等问题,本文自主设计了一套全新的车辆避障系统。该装置通过使用PSD三角测距的方式来采集障碍物位置信息,并将其送入以AT89C52为数据采集与控制的模块,最后在LCD屏幕上显示障碍物信息,能够实现精准探测障碍物位置,具有很高的应用价值。
关键词:PSD三角测距;车辆避障;障碍物
中图分类号:TP301 文献标识码:A
文章编号:1009-3044(2019)14-0205-02
Abstract: In view of the complex structure, high manufacturing difficulty and high manufacturing cost of most of the new intelligent obstacle avoidance systems currently on the market, this paper independently designed a new vehicle obstacle avoidance system. The device collects the obstacle position information by using PSD triangle ranging, and send it to the data acquisition and control module based on AT89C52. Finally the obstacle information will display on the LCD screen, which can accurately detect the position of the obstacle. And this system is very high Application value.
Key words: PSD triangle ranging; vehicle obstacle avoidance; obstacles
随着人民生活水平的日益提高,人们对汽车这种交通工具的需求量越来越大,这也导致城市交通的负荷不断增加,与此同时,也引发了一系列行车安全问题【1~2】。许多驾驶员在行车过程中与其他车辆或者障碍物发生碰撞摩擦的原因,都是对其他车辆或者障碍物的位置判断不够准确,如果司机能够提前知道其他车辆或障碍物的方位以及距离,将会很大程度的减少甚至避免交通事故的发生。
1 系统设计
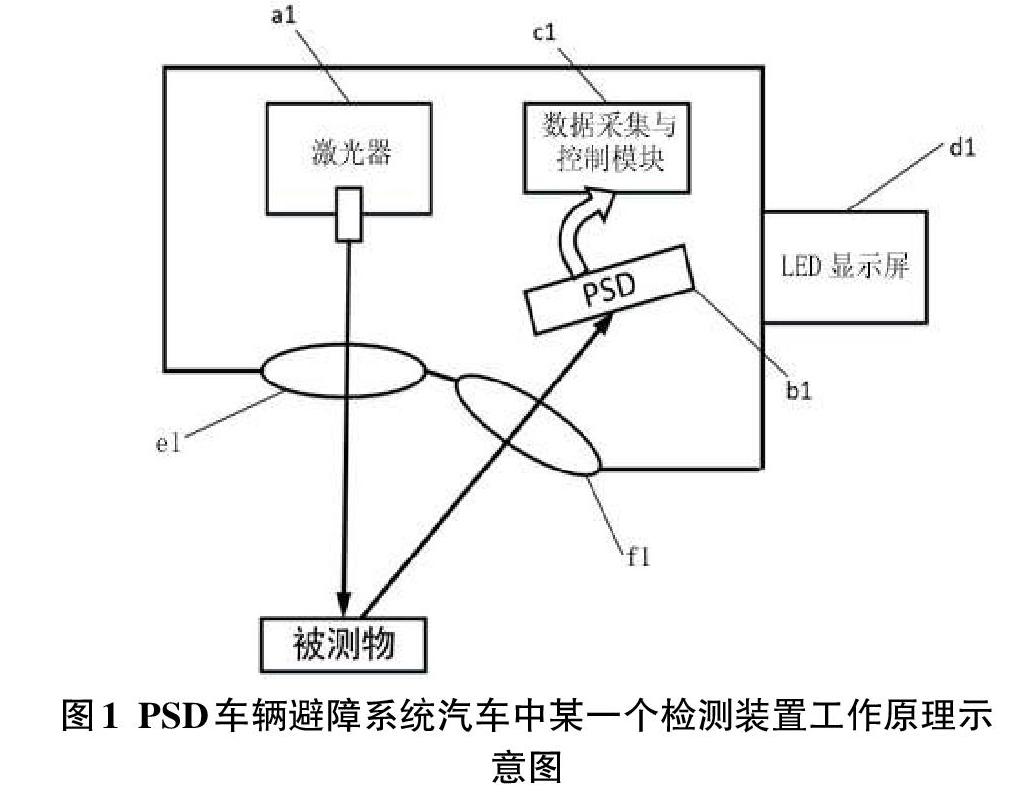
本系统由PSD探测模块、信号放大和处理模块、数据采集与控制模块、AD转换模块以及显示模块五大模块组成。激光器模块a1发射的激光经准直透镜准直后,射到被测目标上形成漫反射,反射的光斑作为传感信号,再通过接收透镜会聚,在PSD模块b1上形成光斑,被测目标和传感器之间的距离决定光斑的中心位置,而模块b1 输出的电信号准确地反映了传感器与被测目标之间的距离信息。当车周边出现障碍物时,被测目标变成了障碍物,PSD 上所形成的光斑的中心位置也会因此而改变,根据光斑位置所发生的改变, 便能测出是否有障碍物。PSD模块b1检测到的信息将会传入数据的采集与控制模块c1,c1会经过分析得到障碍物的准确信息,PSD输出电流信号,该电流信号经过电流电压转换电路,被转换为合适的小电压信号,然后进行放大处理,接着由单片机控制进行AD转换,最终的数据会通过单片机控制LCD显示屏模块d1来显示,通过d1显示屏便可读取障碍物的距离方位值。具体的工作原理图如图1所示。
2 模块工作原理
2.1 PSD探测模块
该模块由激光器、发射透镜、接收透镜以及PSD组成,激光器的中心轴线、PSD和接收透镜的中心光轴三者位于同一平面,与PSD形成三角测距。
由于直射式激光三角测距法[3~6]在减小仪器体积方面优于斜射式, 具体表现在直射式的激光器垂直于照射到被测物体,接收器接收到的多为散射和漫反射后的光线,其方法主要适用于被测物表面较为粗糙;有分辨率较低,探测器结构小,测量范围大,信噪比低的特点。而斜射式与直射式的入射方式不同,即入射光线与被测物表面成一定角度入射,接收器接收到的主要是经过镜面反射后的光线,其方法主要适用于被测物表面近似镜面的物体。有分辨率高,探测器机构体积大,测量范围小的特点。对比可得,本系统采用直射式激光三角测距理论。
激光器通过发射透镜将激光光束折射到障碍物表面,并会形成反射光束,将其作为传感信号,通过接收透镜成像会聚在PSD上,再通过计算得到障碍物的距离信息,此方法最大的优点就是PSD输出只与光斑在PSD上的位置有关,与接收的光强无关;当车四周无障碍物时,激光直接入射向远方,探测仪接收不到反射光,显示为无障碍物;当车身四周出现障碍物时,探测仪上的距离值将发生跳变,此时表示有障碍物,且通过8路PSD测距通道能精准确定障碍物的方位及距离。PSD信号提取及处理电路如图2所示:
2.2信号放大与处理模块
本模块的核心是一个电流电压转换电路,电流电压转换电路的主要作用是把PSD输出的微弱电路信号转换为电压信号并滤波放大。
2.3数据采集与控制模块
本模块选用AT89C52作为MCU模块,还包括AD公司生产的16位AD 7705,单片机的串行输出口通过扩展后与PC机连接,并按照AD7705的传送时序图按位接收和发送数据,采集的数据信号经过处理后被送入单片机,在检测障碍物前,需要先检测并记录下背景信号,在软件中将背景信号除去,并由此获得有用信号,然后精确计算出具体值,并控制LCD显示屏显示相关数据。依靠该单片机系统的高速AD采集功能以及高速运算功能,能够对PSD的输出电路信号进行即时修正,以此达到更高精度地消除干扰、提高检测的精确度以及非线性修正的目的,进而获取更加准确位置信息。
2.4 AD采样模块
本模块的作用是将电路的模拟信号量化为数字信号,即将PSD探测到的位置模拟信号转换成频率,然后利用计数器将频率转换成数字量。该模块设计采用的是16位的AD 7705,能够准确将位置信号送给主控芯片作为信号输入。
2.5 显示模块
本模块选用AMPIRE12864型大屏幕LCD显示屏,该显示屏能给驾驶者更好的观测体验,使数据显示更加清晰明朗,且价格低廉,制造成本低。
3系统的优点
采用基于PSD的位置探测技术,结合8路PSD激光测距模块,三角激光测距方法进行激光探测障碍物,通过该模块来检测距离障碍物的信息,最后将检测到的信号进行AD转换,单片机处理后可得到清楚的距离信息,便可直接读取是否有障碍物以及障碍物的距离,方法简单可靠。
4结语
本设计在传统的车辆避障系统的上,大胆引入了PSD测距模块,采用价格相对低廉的51单片机和LCD显示屏来进行电路搭建,在不影响系统精度的前提下大大降低了系统的开发成本。可为低端车市场提供一个不错的避障系统设计方案,而这将会有一个不错的应用前景。
参考文献:
[1] 徐文涛. 基于FPGA车辆防碰避障技术的研究[D]. 贵州大学,2016.
[2] 商静. 基于主动安全性的汽车避障研究[D]. 沈阳理工大学, 2012.
[3] 苏煜伟. 激光三角法精密测距系统研究[D]. 西安工业大学, 2013.
[4] 姜蕾. 双光路对称补偿的激光三角法位移测量系统[D].浙江大學,2017.
[5] 何晓敏. 高精度激光三角测量距离系统的研究与设计[D].兰州交通大学,2015.
[6] 王丹丹. 大型回转体件形位误差非接触测量系统研究[D]. 长春理工大学 2016.
【通联编辑:梁书】
猜你喜欢
舰船科学技术(2022年22期)2022-12-13
沈阳航空航天大学学报(2022年5期)2022-02-03
动漫界·幼教365(中班)(2020年3期)2020-04-20
铁道通信信号(2020年9期)2020-02-06
创新作文(1-2年级)(2019年4期)2019-10-15
好孩子画报(2019年10期)2019-01-10
中国科技信息(2016年16期)2016-09-10
黑龙江气象(2015年4期)2015-08-22
河南科技(2014年7期)2014-02-27
电子设计工程(2014年12期)2014-02-27
