
水流载荷作用下的潜艇潜望镜力学特性实测与分析
2019-07-30 06:47王延林张大勇赵煜岳前进
船舶力学 2019年7期
王延林, 张大勇, 赵煜, 岳前进,2
(1.大连理工大学 海洋科学与技术学院,辽宁 盘锦124221;2.大连理工大学 工业装备结构分析国家重点实验室,辽宁 大连116023)
0 引 言
潜望镜是潜艇的重要组成部分,被人们比喻为潜艇的“眼睛”。利用潜望镜,艇上人员可以环视海面,测定目标的距离和方位,同时利用潜望镜还可以测量天体以便对潜艇进行定位[1]。如果潜艇在航行的时候艇员使用潜望镜进行观察(潜望状态),潜望镜由于水流的作用会产生弯曲、振动等问题。潜望镜弯曲后将影响其测量精度,尤其对于导航潜望镜,将严重影响其测天精度。常规潜艇在低于12 kns航速航行时,不至于影响潜望镜的性能[2],但是当潜艇航行中对水面情况进行观察(潜望)或发现敌情需要紧急下潜(潜跃)的时候,由于航速较快,潜望镜会受到较大的水流力的作用并产生弯曲、振动等问题。潜望镜与潜望镜套管属于精密构件,在较大荷载及振动情况下会产生磨损、疲劳等问题,此外潜望镜的振动影响艇员观察海面情况,强烈的振动甚至会损坏潜望镜的光学元件而造成功能失效等问题。
综上所述,潜望镜的力学性能是保证潜望镜正常工作的重要指标。掌握潜望镜在水流载荷作用下的结构振动及变形响应情况对于艇上人员正确操作潜望镜及新型潜望镜及其光学器件的设计都具有一定的指导意义。潜艇潜望镜近似为一光滑圆柱体,很多学者对圆柱体在均匀流场内的受力情况进行了大量的数值模拟及模型实验研究[3-5],并将数值及实验结果进行了对比分析,很多工作都具有借鉴意义。但是海上环境复杂,干扰因素较多,因此数值模拟和模型实验的方法都存在其局限性,和真实环境中的潜望镜受力情况差别较大。海上实艇实验无疑可以获得最真实的实验数据,再结合数值模拟等方法,就可以准确评估真实环境中的潜望镜的力学性能。因此本文通过现场实艇实验的方法,获取潜望镜在潜望及潜跃状态下的结构动应变响应信息,再结合理论分析与数值模拟的手段,对潜望镜在水流载荷作用下的力学特性进行实测与分析。而在实验设计时,考虑到常规应变测量技术都是在结构表面粘贴应变片或者焊接封装好的应变式传感器[6-7],如果直接粘贴应变片,需要考虑现场防水等问题,不便于操作;其次由于潜艇潜望镜属于精密构件,表面光滑度需要满足一定的要求,因此传感器的安装和拆卸过程不能破坏潜望镜的光滑表面,也不可以进行例如焊接等操作;同时实艇试验都是在实验海区进行的,由于对实验时间要求比较严格,因此现场需要能够快速安装和快速拆卸传感器。综合考虑各种因素,本文选用了裸光纤光栅(FBG)应变传感器[8],并采用了准分布式测量技术[9]。同时,为了现场便于快速定位和安装,还在实验室设计了光纤光栅快速安装的方法,实现了现场对潜艇潜望镜动应变响应的快速测量。通过对实测数据的分析,对潜艇潜望镜的静力与动力特性进行了分析,并将实测结果与Morison公式计算结果以及Fluent数值模拟结果进行了对比分析。
1 实艇实验方案设计与实施
1.1 实艇实验方案设计
实验方案设计的目的是通过实测潜望镜上动应变响应情况来分析评估潜望镜的水动力特性。潜望镜在升起时可以简化为悬臂梁结构,在水流载荷作用下的结构最大应变发生在潜望镜根部与上导套(如图3)接触部位。同时潜望镜部分管体在导流罩内部,可以认为不受水流力的作用。因此潜望镜在导流罩内部的结构受力可以简化为受到集中载荷作用的悬臂梁,其应变分布规律是线性的。故实验方案设计为测量导流罩内尽量靠近根部的弯曲应变响应。测量方案分别在前后潜望镜靠近根部的某一截面上每隔90°安装一光纤光栅应变传感器,布置方向为沿着潜望镜管方向。这样既可以准确定位潜艇的纵向与横向位置,又可以两两互为补偿,消除温度的影响。其中每个潜望镜的四个传感器通过传输光纤串连,前后潜望镜的两根传输光纤一起经由填料函密封处理后进入潜艇的舱内,连接到SI425光栅解调仪的两个通道上,并通过笔记本电脑与SI425通讯与数据采集。实验方案布置如图1所示。由于本次实验需要潜艇行驶到指定实验海域进行实艇实验,因此潜艇行驶过程中潜望镜需要收起,待到达实验海域后升起进行实验。故传感器需要在到达实验海域后进行快速的安装,实验完成后还需要快速清除传感器,便于潜望镜收起后驶离实验海域。因此实验方案设计为在岸边进行线缆的布设,待到达实验海域后再进行传感器的安装和实验。
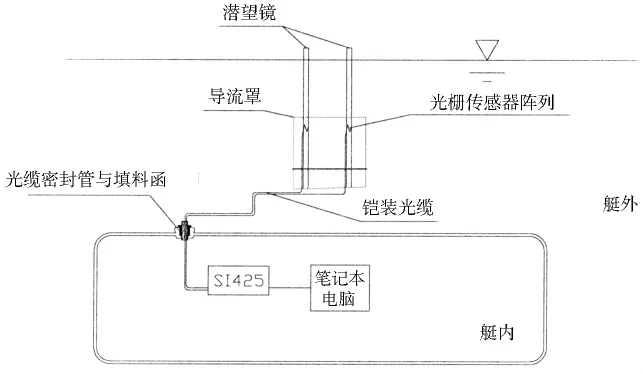
图1实艇实验方案布置图Fig.1 Experiment layout
1.2 光纤光栅水下应变测量方案设计
在水下进行应变测量需要保证传感器防水。潜望镜表面光滑,为便于潜望镜的升降,所以要求选用的传感器便于安装和拆卸,而且此过程中还不能破坏潜望镜表面的光滑程度。针对上述问题与要求,本文选用了裸光纤光栅,其优点是:二氧化硅介质,不怕海水的影响;裸光纤直径只有125 μm对结构影响小;只需要用502胶水粘贴于结构上,安装与拆卸都很方便,因此十分适合本实验要求。
此外,由于实验需要准确测量潜望镜在水流载荷作用下的应变响应情况,所以传感器布点位置设计为沿着潜艇行驶的方向,每隔90°布设一光纤光栅应变传感器。为了在现场安装的时候保证传感器安装的精度与速度,本实验进行了充分的前期准备。首先,准备一塑料薄板,长度为潜望镜的周长,并在每隔1/4周长位置割一竖向椭圆镂空,然后将事先准备好的光纤光栅串布置到塑料板上,如图2所示。安装的时候将塑料板围在潜望镜的镜管上固定好,以保证安装位置的准确性。然后再在镂空处将光栅粘贴在镜管上,以保证传感器的快速安装与准确布设。而且裸光栅比较脆弱,安装不小心会将传感器折断,经封装之后,可保障传感器的安全。通过上述设计,保证了传感器现场安装过程的安全、准确与快捷。

图2自行设计封装的光栅串阵Fig.2 Packaged grating arrays
1.3 实艇传感器安装
潜艇驶入实验海域之后,潜望镜升起并进行了传感器的安装。安装完后,在艇内用测试仪器对安装的传感器进行了测试,但是只测量到了后潜望镜的应变响应,前潜望镜信号丢失。由于实验时间限制,无法进行传感器的更换,故后续实验结果分析只针对后潜望镜。后潜望镜光栅列阵安装位置在距根部85 cm处,如图3所示。
1.4 海试实验工况设计
传感器与设备安装、调试完成之后,对潜望镜进行实艇实验。实验分三大工况,分别为主电机双进一潜望状态(工况1)、主电机双进二潜望状态(工况2)和潜越状态(工况3)。其中潜望状态(工况1和2)根据潜望镜的角度不同,又分成9种不同小工况,实验时每种工况的实际航速、水深、潜望镜角度等参数如表1所示。
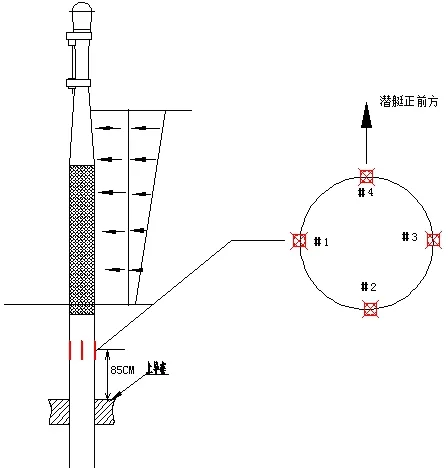
图3后潜望镜测点布置示意图Fig.3 Sensor placement diagram of the downstream periscope
2 实验结果分析
2.1 实测应变响应与温度补偿
各个工况实验进展顺利,实测应变响应信号良好。首先分析每种工况下每个通道应变变化情况,以工况1-7为例。潜望镜1、3通道与2、4通道弯曲应变情况如图4所示。其中1、3通道与2、4通道是相隔180°的一组传感器,在弯矩的作用下,他们的应变大小应该相等,方向相反,一个受拉,一个受压,从实测曲线可以发现这种规律。每组的两个传感器都是大小相等,方向相反,相位正好相差180°。此外每个通道的应变均值都是负的,这是由于潜望镜是由水面潜入水下,水面与水下的温差大,产生负应变的现象,因此需要消除温度效应对实测应变的影响。
分析实测各个通道应变响应的组成,其中,1、3通道为潜望镜横向应变(垂直潜艇行驶方向),2、4通道为潜望镜纵向应变(沿着潜艇行驶方向),因此有:

式中:εH为潜望镜横向弯曲应变;εV为潜望镜纵向弯曲应变;εT为温度应变。由于4个通道的温度效应是一样的,因此温度应变也是一样的,故有

由公式(2)就可以求得潜望镜测点处消除温度影响后的纵向和横向弯曲应变情况。

图5纵向和横向弯曲应变时程曲线Fig.5 Time history of vertical and horizontal bending strain

图6潜望镜潜越应变时程Fig.6 Strain time history of the emergency dive
分析各工况时程曲线,发现潜望镜纵向和横向弯曲应变都存在波动情况。其中工况1和工况2情况下,振动曲线的均值较小,在10~20微应变左右,波动幅度在30微应变左右,如图5所示。工况3振动情况最剧烈,如图6所示,最大波动量达140微应变左右,而且横向振动情况要远大于纵向的振动情况,分析认为此工况发生了比较强烈的涡激振动问题,具体原因将在后续文中进行详细的分析。
2.2 潜望镜动力特性分析
潜望镜的自振频率是潜望镜设计、潜艇操作等环节的重要参考指标。而水中潜望镜由于受到海水的阻尼力的作用,其自振频率是变化的。因此分别对空气中的潜望镜和水中不同航速下的潜望镜自振频率进行分析比较。
2.2.1 潜望镜水面振动频率分析
当潜艇在水面漂浮且潜望镜完全升起的状态下,对实测到的应变响应进行频谱分析,得到频谱如图7所示。频谱图上有两个峰值分别为0.25 Hz和5.75 Hz。其中0.25 Hz的频率接近波浪的频率,因此其为潜艇随波浪漂浮的频率,故5.75 Hz即为潜望镜在空气中的自振频率。
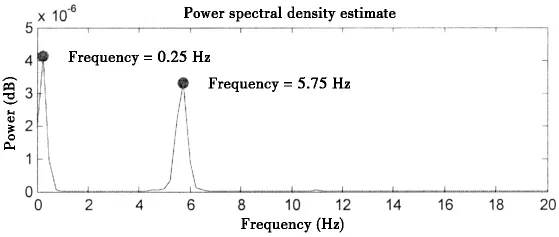
图7水面飘浮时潜望镜振动频谱Fig.7 Vibration spectrum when the periscope floating on the water
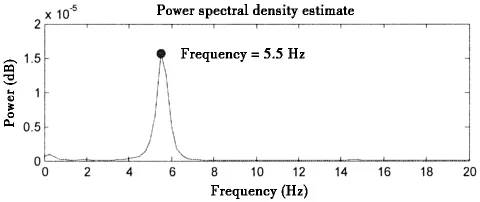
图8 潜望镜工况1-5下振动频谱Fig.8 Periscope vibration spectrum in condition 1-5

图9工况3-1振动频谱Fig.9 Periscope vibration spectrum in condition 3-1
2.2.2 潜望镜水下振动频率分析
在水下航行的时候,通过实测应变响应时程分析每种工况下潜望镜的振动频率。通过分析发现,潜望镜在工况1和工况2情况下,振动频率在5.5 Hz左
右,如图8所示。而工况3-1的振动频率只有5 Hz,如图9所示。说明潜望镜水下振动频率随着与水流的耦合作用是发生变化的,流速越大,其自振频率越小。
2.2.3 潜望镜涡激振动分析
通过实测应变数据发现,潜望镜在不同工况下都有不同程度的振动情况。尤其是在3-1工况下,振动尤为剧烈,而且横向振动幅度要远大于纵向振动幅度,故认为有可能发生涡激振动现象,如图6所示。所谓的涡激振动是指:当波浪、海流和风荷载在流经结构(一般是指细长结构)时,在一定的流速条件下,可在结构的两侧交替地形成强烈的旋涡,旋涡脱落会对结构产生一个周期性的可变力,使得结构在与流向垂直方向发生横向振动[10]。
由于当雷诺数一定的情况下涡激振动形态和强度往往与约化速度有关,下面给出了约化速度的表达式:

式中:Ur为约化速度;U为水流速度;fn为圆柱体的固有频率;D为圆柱体的直径。换算得到潜艇不同航速下的约化速度如表2所示。
下面来分析振动原因。由于实测中升起了前后两个潜望镜,因此前后两个潜望镜可以看做是串列双圆柱体。在均匀流场中串列双圆柱体后,在一定雷诺数范围内的旋涡发放可以产生涡激振动。根据文献[11] 可知,和单圆柱绕流的情况相比,串列双圆柱绕流的圆柱周围流动更加复杂。当圆柱间距比L/D(L为两圆柱中心的间距,D为圆柱直径)较小时,下游圆柱的存在会显著改变上游圆柱的尾流形态,只有当间距比超过临界值(与雷诺数、圆柱长径比等有关)时,下游圆柱对上游圆柱的影响才可以忽略。与之不同,上游圆柱对下游圆柱的影响则会一直延续到很大的间距比[12]。图10与图11为文献[11] 给出的无量纲化的不同圆柱间距比L/D情况下的结构最大振幅(上游圆柱与下游圆柱)随约化速度变化的情况。
表2约化速度列表Tab.2 Reduced velocity of different speeds

图10上游圆柱最大振幅随约化速度变化情况Fig.10 Variation of the maximum amplitude with the reduced velocity at different spacing ratios of upper cylinder
由于两潜望镜之间的距离L=1.565 m、直径D=0.18 m,所以可得L/D=8.7。与单圆柱相比,串列双圆柱的下游圆柱锁定区间开始的约化速度要大于单圆柱的情况,锁定区间的范围也明显更宽。下游圆柱振幅达到最大值以后,随着约化速度的增加,振幅出现不同程度的下降,间距比越小,其下降速度越慢。这说明潜艇以8.3 kns航速潜望时,潜望镜的振动相对较小,没有发生频率锁定现象;而潜艇在以10 kns的航速运动的时侯,约化速度为4.9,同时发生流向共振和横向共振。而且横向振动情况大于流向振动情况。以上对涡激振动分析的结论与实测现象相吻合,说明3-1工况下确实发生了涡激振动现象。
2.3 拟静水流力分析
2.3.1 潜望镜水流载荷分析
根据实测应变数据可以看出,潜望镜在水流力的作用下会发生振动问题。因此所测应变是动应变。根据实测动应变曲线,可以得到不同工况下的被测截面应变的最大值,但得到的被测截面的最大应变值并不是整个潜望镜的最大应变。由分析可知,潜望镜危险截面即应变最大点在上导套与潜望镜接触处。所以需要根据实测数据推算潜望镜的最大应变值。

图11下游圆柱最大振幅随约化速度变化情况Fig.11 Variation of the maximum amplitude with the reduced velocity at different spacing ratios of downstream cylinder
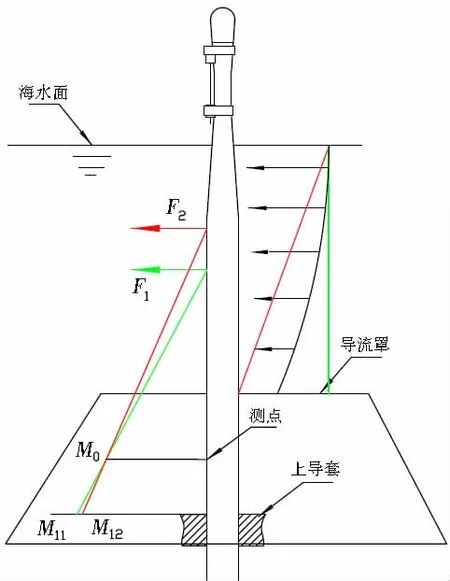
图12潜望镜水流力分析示意图Fig.12 Analysis diagram on flow force
分析被测截面与危险截面之间的关系,如图12所示。由于水流分布比较复杂,无法给出准确的水流分布情况。水流力的分布形式介于三角形荷载与均布荷载之间[13]。其中均布荷载可以等效为(只考虑导流罩内潜望镜的受力情况)作用在距底面1/2处的集中荷载(F1);三角形荷载可以等效为距底面1/3处的集中荷载(F2)。根据测量到的应变值是不变的,即被测截面所受的弯矩的大小M0是不变的。所以在这两种等效荷载作用下,导套处的弯矩是不同的,而导套处的真实弯矩Mmax应该是介于这两种情况之间的,即

由几何条件推导得到:


故实际的拟静水流载荷F介于上述两种载荷之间,即:

由上述公式得到不同工况下潜望镜上导套处最大应变、应力及拟静水流力数据如表3所示。通过比较可以发现,工况3-1的拟静水流力最大,可达4.5 kN,对应的最大应力为44.1 MPa,占许用应力(166 MPa)的26.6%,仍满足强度要求。
进而得到对应的均布载荷F1和三角载荷F2分别为:

表3潜望镜根部最大应力应变情况Tab.3 Maximum stress and strain of the periscope
2.3.2理论计算与数值模拟结果的对比分析
通过Morison公式[13]和Fluent软件分别对潜望镜所受的水流力进行估算。计算时分别取8.3 kns和10 kns航速。
(1)水流载荷计算Morison公式
一般来说当只考虑海流作用时,对圆形构件单位长度上的海流荷载F可由下式计算:

式中:F为海流力(kN/m),Uc为海流速度(m/s),Cd为水流力系数,ρ为海水密度(kg/m3),A为单位长度构件在与流向垂直平面上的投影面积(m2),海流力的作用方向与海流方向相同。对于圆柱体来说Cd取为0.73;海水的密度ρ为1 020.24 kg/m3。
(2)水流力数值模拟软件Fluent
Fluent是目前处于世界领先地位的CFD软件之一,它是一个用于模拟和分析在复杂几何区域内的流体流动与热交换问题的专用CFD软件。本次计算模型采用的水域是20 m×20 m×20 m正方体,潜望镜模型通过真实的潜望镜尺寸建立。由于潜望镜的尺寸相对于整个水域来说很小,所以在离潜望镜周围较远处的水域采用六面体单元来划分网格,在潜望镜附近的水域采用四面体为主六面体为辅的网格来划分,这样也比较接近实际的情况(如图13)。对于海水密度,黏度动力系数,摩擦系数等参数都采用实测值设置。由于整个水域比较大,所以在模型的前后左右均设为速度边界条件,在模型的上表面采用压力出口边界条件,潜望镜处和模型的地面设为Wall边界条件。求解器选为隐式非藕合稳定求解器,最后通过迭代2 000次达到收敛。计算得到的潜望镜压力分布云图如图14所示。

图13划分网格后的模型图Fig.13 Mesh model
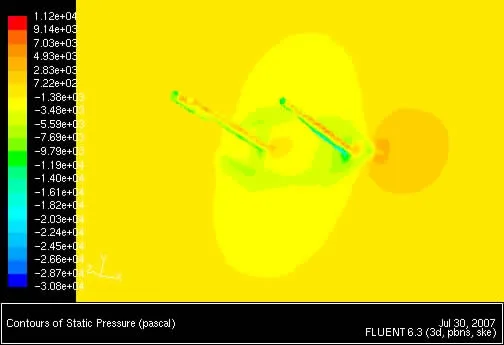
图14潜望镜压力分布云图Fig.14 Pressure contours of periscopes
(3)结果对比分析
用Morison公式和Fluent软件进行计算的结果与实测数据进行比较,如表4所示。
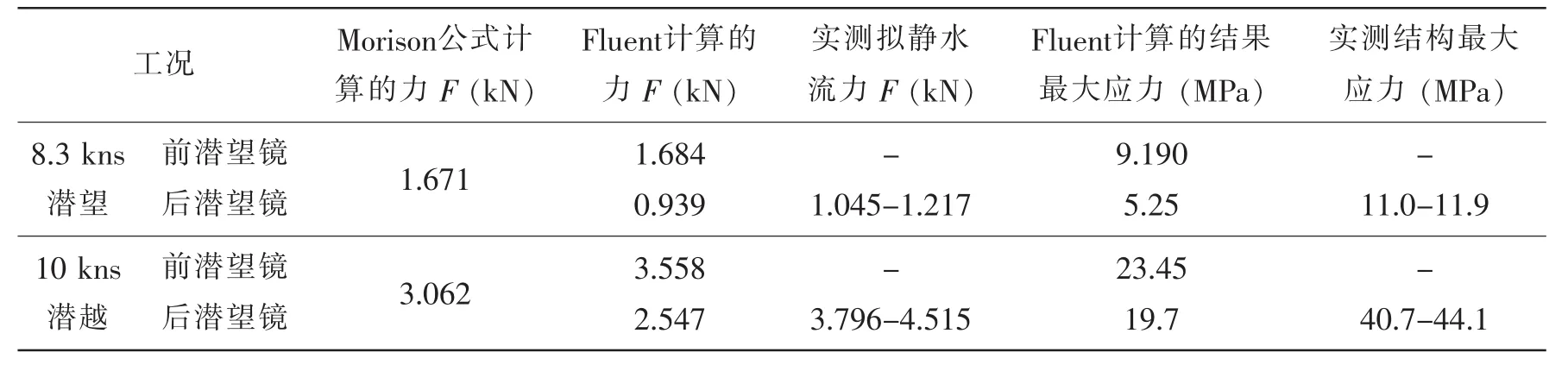
表4水流力结果对比Tab.4 The flow forces comparison
由上面的结果可看出在8.3 kns潜望状态下,用Fluent计算前潜望镜的水流力(1.671 kN)与Morison公式计算的(1.687 kN)很接近,而后潜望镜的水流力偏小(0.939 kN)。这说明Morison公式与Fluent模拟的结果比较接近,而由于前潜望镜的遮蔽效应,后潜望镜的水流力要小于前潜望镜的水流力,而Morison公式没有考虑到遮蔽效应。进而与实测后潜望镜的拟静水流力比较,实测水流力(1.045~12.17 kN)要大于数值结果(0.939 kN)。分析其原因:一方面实测水流力不但包含潜艇航行时候产生的水流影响,还包含了现场波浪、海流等因素的影响,这些因素都会增加潜望镜受到的水流载荷;另一方面拟静水流力是将实测动应变简化为拟静力作用下的应变,进而推导得到的水流力,故其比真实水流载荷也要偏大一些,因此实测结果与计算结果也比较吻合。再比较Fluent计算的结构最大应力(5.25 MPa)与实测最大应力(11 MPa),实测最大应力要远大于数值模拟的结果,具体原因还有待进一步分析。但是实测值要远大于数值模拟结果(接近二倍的关系),这一现象需要重点关注和进行更加深入的分析。
此外,在10 kns潜跃的情况下,用Fluent计算前潜望镜的水流力(3.558 kN)与Morison公式计算的(3.062 kN)有一些差别,可能是由于潜跃情况下潜望镜顶端不是规则的圆柱体,故Morison公式计算结果偏差较大。由于前潜望镜的遮蔽效应,后潜望镜的水流力偏小,而与实测水流力进行比较发现,实测水流力要远远大于数值结果,甚至大于Fluent计算的前潜望镜的水流力(3.558 kN)。同时实测结构的最大应力也远大于数值结果。由本文前面论述可知,在10 kns潜跃的工况下,潜望镜发生了比较强烈的涡激振动问题,故实测水流力及结构最大应力都很大。而数值模拟结果没有考虑到涡激振动的问题,故结果偏小。由上述分析可知,在10 kns航速情况下,潜望镜所受的拟静水流力和结构应力都比较大,结构振动响应也比较剧烈,潜望镜存在较大的风险,可能造成潜望镜的功能失效甚至是结构损伤。故潜艇在超过10 kns航速运行的时候应避免升起潜望镜进行潜望或进行紧急下潜的操作。
3 结 论
潜望镜是潜艇上的重要设施,其力学特性的分析对于潜望镜的改良、制造或使用都具有重要参考意义。本文通过实艇实验对潜望镜在不同工况下的应变响应进行了测量。通过对测量数据的分析,对潜望镜的静力与动力特性进行了分析,主要结论归纳如下:
(1)潜艇在低于10 kns航速航行的时候,潜望镜在水流的作用下会发生振动问题,但是振动幅度较小,对潜望镜结构及功能影响较小。
(2)潜艇在高于10 kns航速航行的时候,潜望镜会发生强烈的涡激振动问题。潜望镜的振动会增加结构的应力响应及损伤情况。潜跃工况下结构的振动尤为强烈,需要尽量避免在潜望镜升起的情况下进行紧急下潜操作。
(3)在没有发生涡激振动问题的情况下,潜望镜的数值模拟结果与实测结果吻合较好,可以用数值方法对潜望镜进行分析,但是实测最大应力情况要偏大一些,这一点需要重点关注。而在10 kns以上航速航行时候,数值结果偏小,需要结合实测结果进行设计与分析。
(4)实验中没有实测到前潜望镜的数据,对于前潜望镜的分析可以参考后潜望镜的实测结果并结合数值模拟的方法进行相关分析。
猜你喜欢
中学生数理化·八年级物理人教版(2022年4期)2022-04-26
小哥白尼(军事科学)(2022年1期)2022-04-26
小学生学习指导·高年级(2022年2期)2022-02-16
中学生数理化·八年级物理人教版(2021年11期)2021-12-06
小哥白尼(军事科学)(2021年6期)2021-11-02
小学生学习指导(高年级)(2021年6期)2021-06-19
小哥白尼(军事科学)(2021年12期)2021-03-29
小哥白尼(军事科学)(2021年11期)2021-02-28
文苑(2020年6期)2020-06-22
奇闻怪事(2009年3期)2009-05-22
