液压四足机器人设计冲突消解方法研究
2019-08-13 01:22秦建军路可欣
兵器装备工程学报 2019年7期
秦建军,路可欣,江 磊,苏 波
(1.北京建筑大学 机电与车辆工程学院城市轨道车辆服役性能保障北京重点实验室, 北京 100044;2.中国北方车辆研究所, 北京 100072)
在产品概念设计阶段,对产品方案单元配置进行方法研究,可以大大改善对不同特定功能的响应程度,得到更为满足要求的元件配置结构,提高研发效率,缩短开发周期,增强产品核心竞争力。
液压四足机器人因其具有突出的非结构地形适应能力、功率密度比高等特点得到了广泛关注,以美国波士顿公司研发的Big dog液压四足机器人为例,其具有冰面、崎岖地形等地形通过性以及抗外部大冲击下的自平衡能力,意大利研究院研发的HyQ进一步实现了机器人在不同环境下的周期性跳跃。与此同时,国内学者也进行了大量研究,上海交通大学田兴华等[1]根据液压四足机器人的运动性能,在不同的地形中提出了三种不同的混联腿结构构型,同时进行了MATLAB与ADAMS的联合应用仿真研究;为提高机器人腿部柔顺性,华中科技大学于汇洋[2]在踝关节与趾关节之间引入韧带元件,同时将链式传动应用在腿部结构的髋关节和膝关节上,以此来降低腿部的转动惯量;山东大学荣学文[3]、朱彦防[4]提出对SCalf机器人每条腿配置四个主动自由度,实现了多种步态的随机转换;为进一步实时跟踪机器人腿部关节的运行情况,西北工业大学张学峰等[5]针对液压四足机器人在非结构化地形中的高机动需求,提出了运用PD迭代控制算法。由此可以看出,液压四足机器人的腿部结构研究主要集中在算法与建立数学模型等方面,但在实际的元件配置中,会出现元件之间的相互冲突以及元件间相互制约的现象,难以实现腿部结构多次优化,为此提出了冲突元件消解方法与结构创新设计。
1 设计结构矩阵
设计结构矩阵(Design Structure Matrix,DSM)建立模型可描述元件间关系,可用有向图表示,其中有向图是由多个节点间的有向线段构成,运用有向图可以描述产品设计结构矩阵中各元素之间的关系,根据各个信息流动方向,可分为顺序(从属)、并行(独立)、耦合(共生)、条件(偶然)这四种关系。
1) 顺序(从属):配置元件间具有前后的依赖关系,前面的任务输出信息时,后面的任务才能开始执行。
2) 并行(独立):配置元件间分别独立执行,各配置元件不存在必然联系。
3) 耦合(共生):该关系在产品配置过程中应用的最为普遍,在产品配置设计过程中占主要影响因素,配置任务间存在相互依赖关系,各配置任务间存在众多信息交互现象,通常通过多次反复迭代才能完成。
4) 条件(偶然):配置元件间具体的流向可以选择,且均可完成配置任务。
若需要进一步识别各元件间耦合任务集,定义配置元件耦合强度指数CII(Coupling Intensity Indicator),其定义式为
CII=CIIt-CIIu
(1)
式中:CIIt为配置元件耦合集内部耦合平均值,CIIu为所有配置元件耦合平均值,其中CIIt与CIIu的定义式分别为
(2)
(3)
式中:oij为配置元件耦合的关联程度,r为首个配置元件在矩阵中行(列)序号,n为末端配置元件在矩阵中行(列)序号,s为配置元件总数,在给定阈值的情况下,通过配置元件耦合强度可得到所有耦合集。
2 基于设计结构矩阵的功能结构聚类的元件冲突消解
2.1 研究方案
本文的研究理论主要基于设计结构矩阵与分支拓扑树结构方法,对含冲突元件的聚类矩阵进行划分,得到满足特定功能的最优产品元件配置,其主要方案可分为4个关键步骤。
步骤1 对含冲突元件的设计结构矩阵进行聚类。用有向图表示元件配置关系,运用布尔代数算法将其与冲突矩阵进行累加,得到设计结构聚类矩阵,优化产品流程,迭代次数得以减少。
步骤2 基于产品设计结构矩阵建立分支拓扑树结构。将设计结构聚类矩阵与典型分支拓扑树结构进行映射,转化为分支拓扑树图论的分解结构,以便对最优方案进行评价与遴选。
步骤3 基于产品设计结构矩阵聚类的评价分析。在设计结构矩阵中进行模块划分,遵循高内聚低冲突的聚类原则,根据该原则对多方案进行评价与遴选,得到最优方案。
步骤4 基于分支拓扑树的粒度层级分析确定最终元件组合。将最优方案进行进一步子模块划分,与多种算法结合使用,使数据简洁,冗余信息最小化以得到满足需求的最终配置元件组合。
以液压四足机器人为例,其腿部结构的功能结构聚类创新流程框图如图1所示,将机器人腿部多个元件进行设计结构聚类分析,通过冲突指数与内聚度这两个评价指标遴选出最优腿部设计方案,对该方案进行粒度层级分析,得到最终的配置元件子模块,在此基础上生成液压四足机器人腿部结构设计的创新方案。
2.2 基于设计结构矩阵的冲突元件聚类方法
产品设计早期是一个动态且复杂的设计流程,为实现后期元件的聚类装配,在该阶段应根据元件间的关系构建设计结构矩阵,同时要考虑元件的相互冲突以及相互制约的问题,本节提出了基于设计结构矩阵的冲突元件聚类方法。
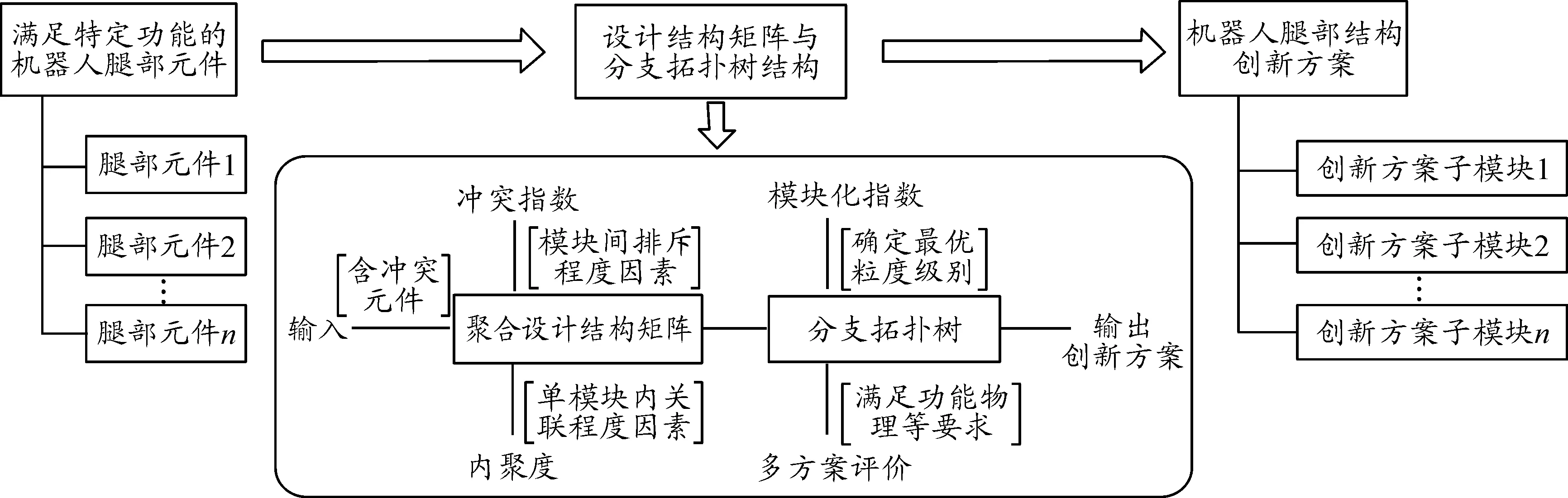
图1 液压四足机器人腿部结构的功能结构聚类创新流程框图
有向图对应的邻接矩阵为布尔型DSM,其运算规则遵守布尔代数有关的算法,设构成产品元件集合为P={p1,p2,…,pi,…,pj,…,pn},产品元件之间关系的集合为D={d1,d2,…,dm},则有向图Q=〈P,D〉是阶数为n的邻接矩阵A,其元素aij为
(4)
通过产品设计结构有向图,对应得到其邻接矩阵A={P,D},有向图与邻接矩阵关系如表1所示。
表1 产品元件有向图与邻接矩阵

当设计结构矩阵中存在冲突元件时,定义n阶方阵C=(cij)n×n,其中
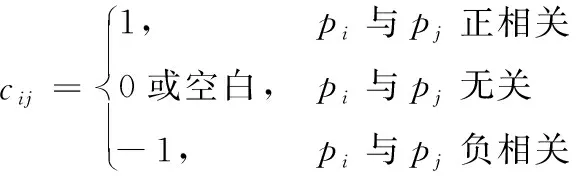
(5)
则称矩阵C为该设计结构矩阵的冲突矩阵,且该设计结构矩阵的聚类矩阵R的定义式为
R=P1+P2+…+Pn+nC
(6)
式中:P为R的邻接矩阵,n为冲突强化系数。
2.3 建立分支拓扑树模型
对结构进行元件装配的优化与创新时,要按照一定的约束进行分解,这属于多学科离散性优化的问题,将设计结构矩阵与分支拓扑树结构进行映射,将其转化为分支拓扑树图论的分解结构以便于对最优方案进行评价与遴选,并划分子模块,分支拓扑树与多种算法结合使用,使数据简洁,冗余信息最小化。
分支拓扑树图:常用Graph=〈V,E〉表示,其中V表示配置元件节点集,E表示配置元件边集。
分支拓扑树子图:若有两个无向图Graph′与Graph,存在V′⊆V且E′⊆E,则称Graph′为Graph的子图。
分割矢量:对于产品元件结构而言,通常用分支拓扑树的“点”表示各个元件,且处于树终端;用“边”表示元件之间的连接关系,用二进制变量φi表示分支拓扑树中的分割矢量,φ的定义式为
φ=(φ1,φ2,…,φE)
(7)
φi=0(edgeremoved)或1(edgeexists)
(8)
分支拓扑树一般分为有根拓扑树与无根拓扑树,如图2所示,其中无根拓扑树不含信息流向方向,仅展示元件间相互关联性,故本文采用有根拓扑树进行研究,有根拓扑树(n≥3)可产生ψ种分支拓扑树子图,如图3所示,其中ψ定义式为
(9)
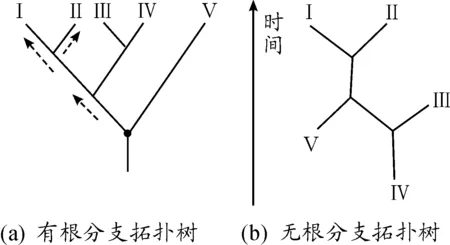
图2 有根与无根分支拓扑树
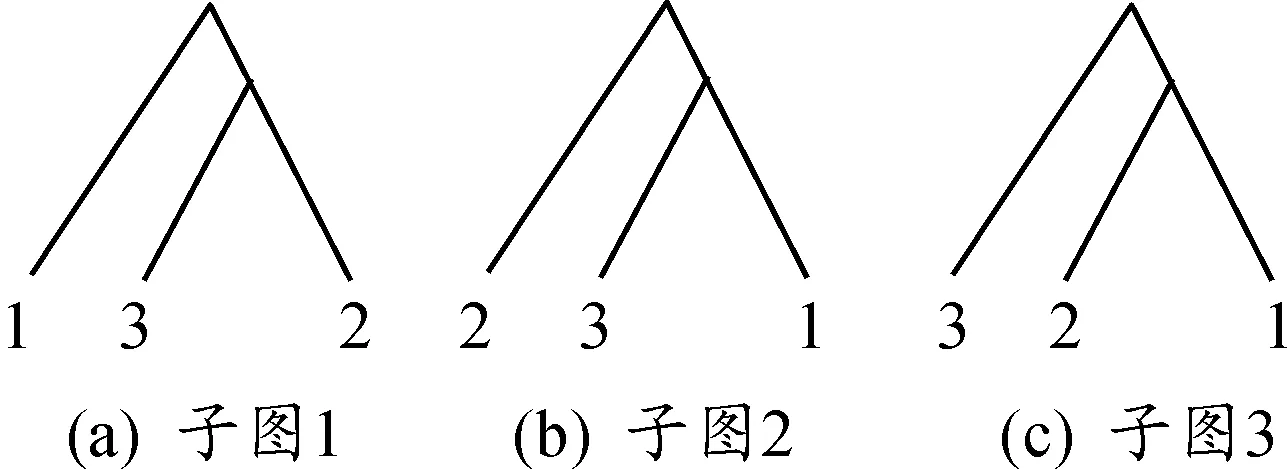
图3 n=3的分支拓扑树子图
2.4 产品设计结构矩阵聚类评价分析
在产品设计结构矩阵进行模块划分时,要确保模块内关联程度大,模块间冲突指数小,即遵循高内聚低冲突的聚类原则,根据该原则对多方案进行评价与遴选,得到最优方案。
冲突指数是指设计结构矩阵中模块间的排斥程度,直接反映了模块间的独立性,本文利用冲突指数Obj作为评价模块间排斥程度的重要指标,其定义式为
(10)
式中:Ci为聚类子模块的矩阵大小;I0为聚类子模块外设计要素个数总和;α与β为权值系数,可用来调整冲突指数的影响程度,这里取α=10,β=100。
内聚度是在单模块内各组成部分间的关联程度,关联程度越大,表明模块相对独立性越强。目前,大多采用布尔型设计结构矩阵的产品模块划分指标对模块内的关联程度进行计算,对给出的N个设计结构矩阵聚类模块S={s1,s2,…,sN},Win的定义式为
(11)
(12)
(13)

在聚类模块si中,设计结构矩阵的模块化程度越高,对应于win(si)越小,说明该聚类模块相对结构紧密,对于产品总体结构而言,win越小表明设计结构模块化程度越高,反之,则说明模块化程度越低。
由式(10)与式(11)可以得知,在多方案遴选中,冲突指数Obj与内聚度Win越小,表明在设计结构矩阵中的聚类效果越好,由此可作为方案评价与选择的重要指标。
2.5 分支拓扑树粒度层级分析
为进一步对最优方案进行子模块划分,以得到满足需求的配置元件组合,将设计结构矩阵与分支拓扑树进行映射,利用模块指数MI(Modularity Index)确定最优集成元件子模块,其定义式为
MI=I+Z
(14)
式中:I为子模块外设计要素1的总和;Z为子模块内设计要素0的总和。
分支拓扑树粒度层级分析步骤如图4所示,其中第一粒度层级包含两个子模块{C、D、E、F、A}和{B},MI为10;第二粒度层级包含三个子模块{C、D、E}、{F、A}和{B},MI为6;第三粒度层级包含四个子模块{C、D}、{E}、{F、A}和{B},MI为10,第四粒度层级包含六个子模块{C}、{D}、{E}、{F}、{A}和{B},MI为14,在粒度层级分析中,取模块化指数MI最小的为最优粒度层级,图4中第二粒度层级的模块化指数MI最小,故最优集成元件子模块为{C、D、E}、{F、A}和{B}。
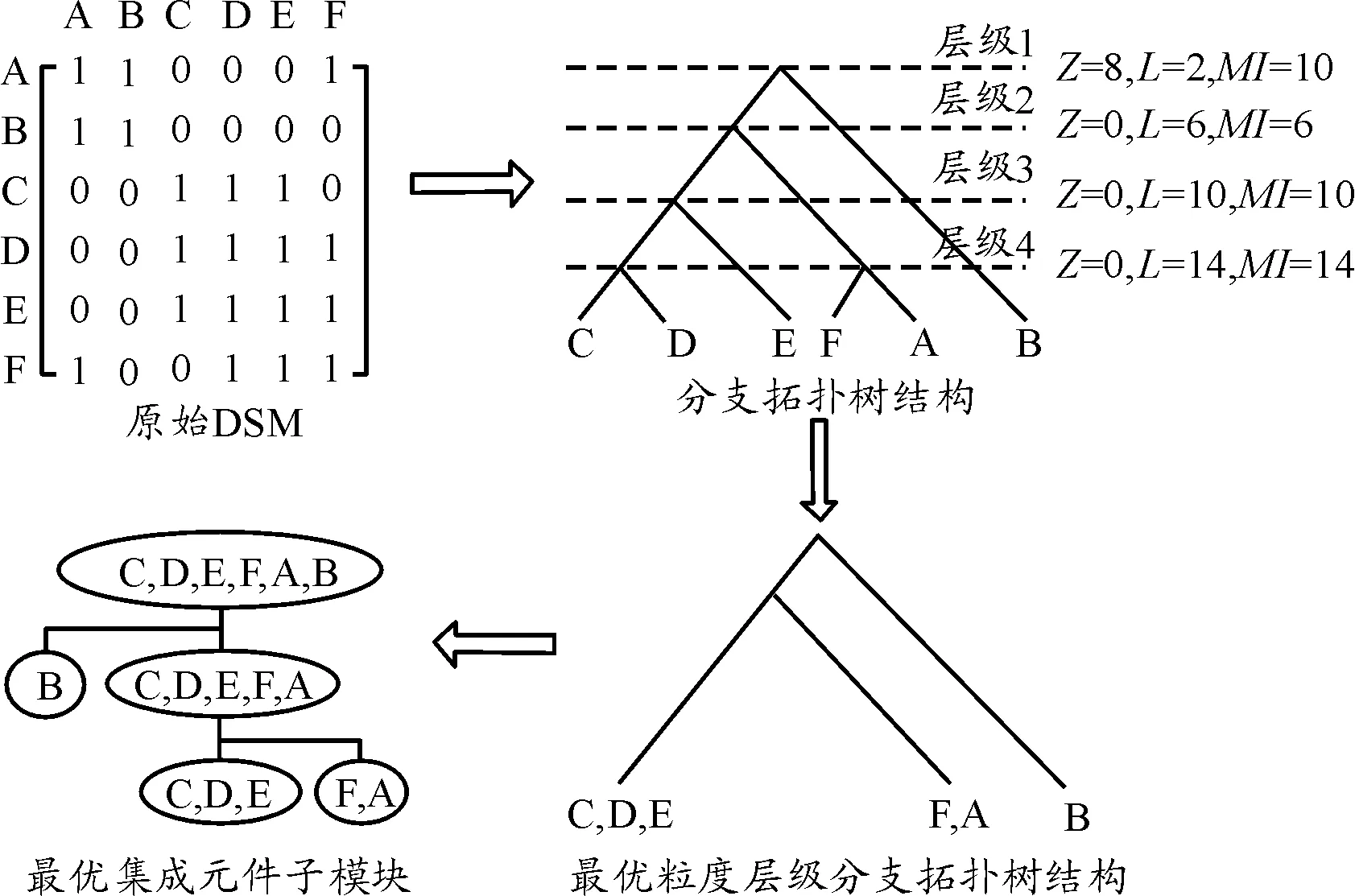
图4 分支拓扑树粒度层级分析步骤
3 案例
与履带、轮式等成熟物理平台的机器人相比,液压四足机器人在机动、感知、承载、防护等方面尚有较大改善和提高空间,以美国波士顿大狗机器人为例,其纵向自由度位置贴近地面,对复杂地形适应性较好,但其髋部横向自由度距离地面较远,影响其灵活性。本案例以五款典型液压四足机器人为设计原型,对腿部结构元件(如图5所示)进行冲突分析,目标是创新新的腿部结构设计方案,使其更好的适应非结构化地形。

图5 液压四足机器人的腿部结构元件
五款液压四足机器人的主要元件配置如表2所示。
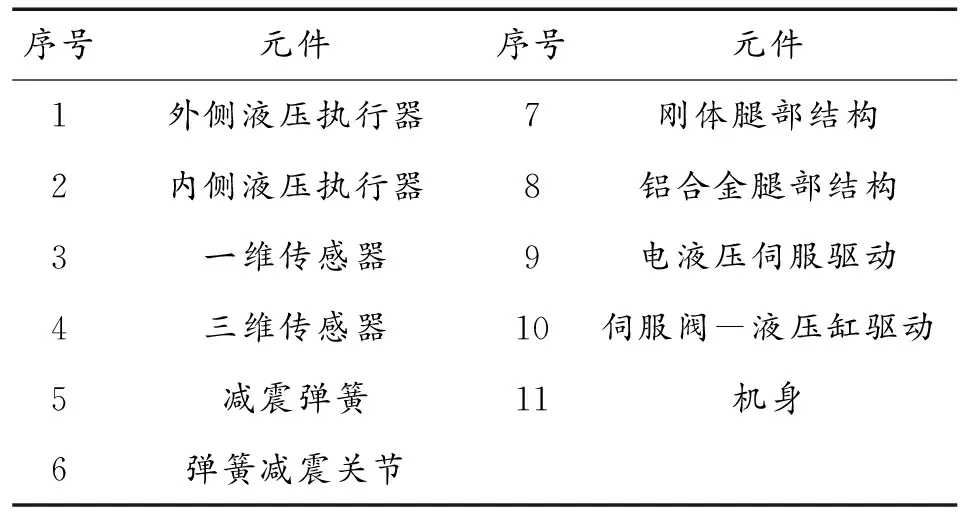
表2 液压四足机器人元件
机器人腿部共11个主要元件,为简明起见,配置元件间无任何联系的0未标识,用DSM1、DSM2、DSM3、DSM4、DSM5分别构建设计结构矩阵,如下:

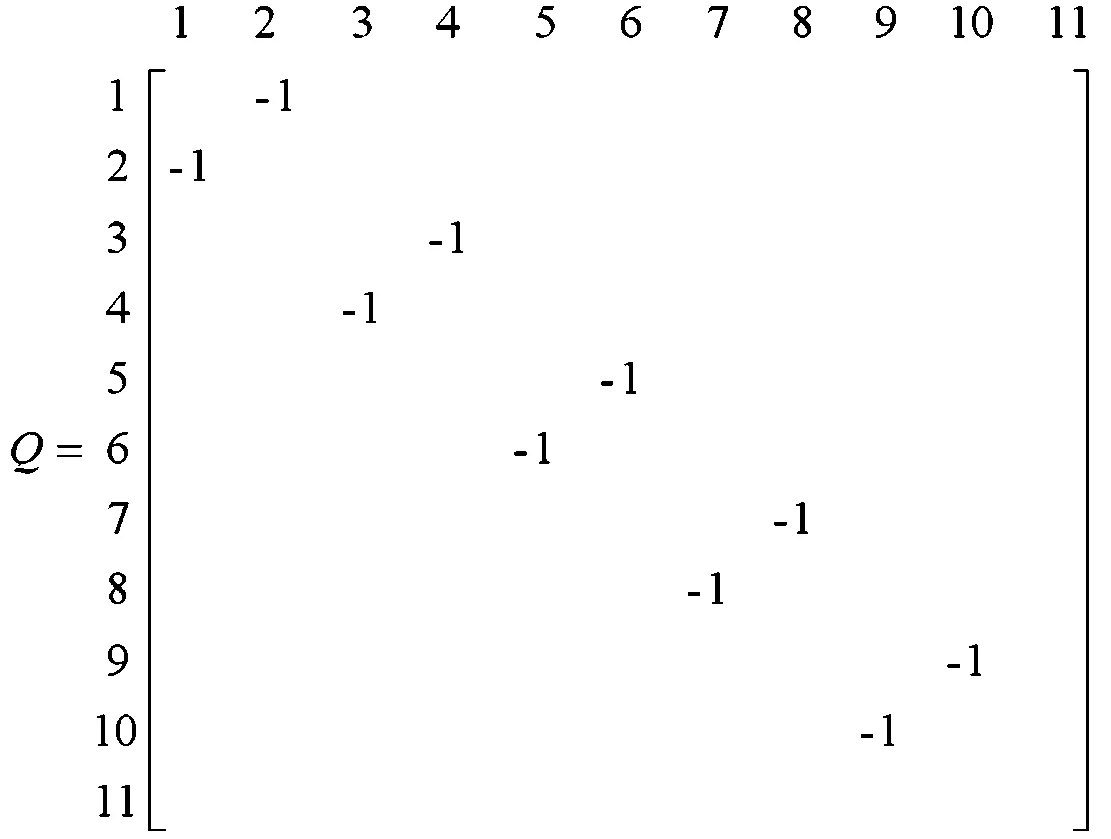
其中,负元素表示配置元件存在冲突互斥现象,即不可同时存在于同一液压四足机器人中,建立液压四足机器人元件冲突设计结构矩阵Q,如下:
利用式(6),将六个设计结构矩阵进行累加,同时加强负元素在聚类设计结构矩阵中的影响,避免单模块间的互斥现象,得到最终的聚类设计结构矩阵DSM,如下:
通过分支拓扑树对液压四足机器人聚类设计结构矩阵进行分析,本案例共有11个元件,根据式(9),可产生 6 547 290种分支拓扑树子图,选其中六款典型的六级分支拓扑树子图方案进行比较,如图6所示,拓扑树终端元件重新排列,利用式(10),依次计算其聚类冲突指数,对这六种方案进行遴选。
其中方案1、方案4与方案5的聚类冲突指数较高,不满足液压四足机器人腿部元件设计,故应排除;对方案2、方案3与方案6分别构建设计结构矩阵,如图7所示,(a)聚类方案2分为两个子模块x1(2,8,5,3,11,10)与x2(9,4,6,7,1);(b)聚类方案3分为两个子模块x1(7,4,1,6,11,9)与x2(10,5,2,3,8);(c)聚类方案6分为两个子模块x1(7,1,4,6,9)与x2(11,10,5,3,2,8)。

图7 三种聚类方案
利用式(11),分别对3种方案的子模块内聚度进行计算,以方案2中子模块x1(2,8,5,3,11,10)为例(参见图8),计算该子模块内聚度
其他模块的内聚度计算以此类推,得到方案2的内聚度
同理计算方案3与方案6的内聚度,结果见表3,从表3可以得出聚类方案2的内聚度最小,其聚类子模块间的结构紧密,故为最优聚类方案。
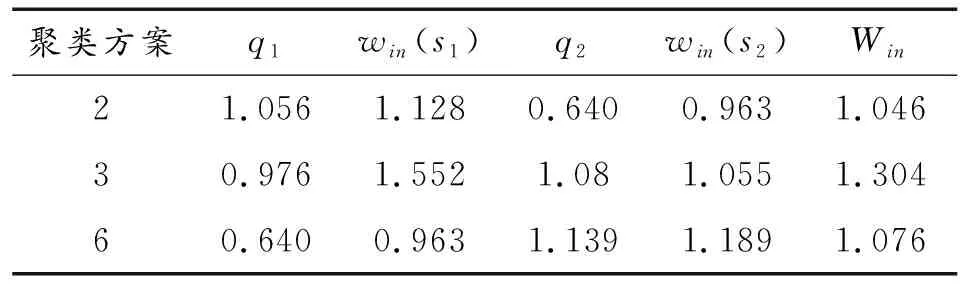
表3 聚类方案的内聚度指数
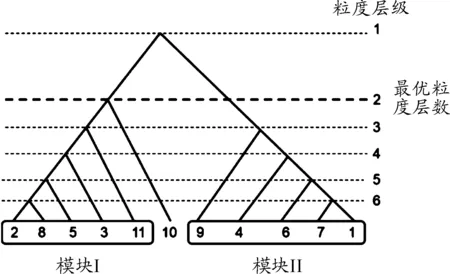
图8 方案2分支拓扑树粒度层级
为进一步确定方案2的最优集成元件子模块,利用式(14)确定每一层级的模块化指数,结果如表4所示,确定最优粒度层级。

表4 粒度层级模块化指数
第三层级中,分解的分支图产生两个子模块,模块Ⅰ为{2,8,5,3}由“内侧液压执行器”、“铝合金腿部结构”、“减震弹簧”、“一维传感器”构成;模块Ⅱ为{4,6,7,1}由“三维传感器”、“弹簧减震关节”、“刚体腿部结构”与“外侧液压执行器”构成,模块Ⅰ与模块Ⅱ均缺少“机身”这一关键组件,无法组成完整的机器人腿部结构,第四层级、第五层级与第六层级均存在相同的问题,故均应排除。与第一层级相比,第二层级的模块化指数较小,为最优粒度层级,其由两个子模块组成,将第二层级的模块Ⅰ与模块Ⅱ进行比较,模块Ⅰ为{2,8,5,3,11}由“内侧液压执行器”、“铝合金腿部结构”、“减震弹簧”、“一维传感器”与“机身”构成,机器人腿部结构完整,在非结构化地形中运动性能更好,根据第二层级模块Ⅰ中的元件配置生成本案例的创新方案,如图9所示,为4自由度配置方案,配置3条液压缸使得系统的总重量容易控制,臀部侧展关节(Hip a/a)、臀部摆臂关节(Hip f/e),膝关节(Knee f/e)为主动运动关节,由3条液压缸推动关节实现铰接运动;足部为被动自由度,安装弹簧-阻尼,实现系统的减震作用,该方案的优点在于结构清晰、合理,以最少的自由度,实现了四足移动的仿生学原理,更好的满足了非结构化地形中的多种需求。
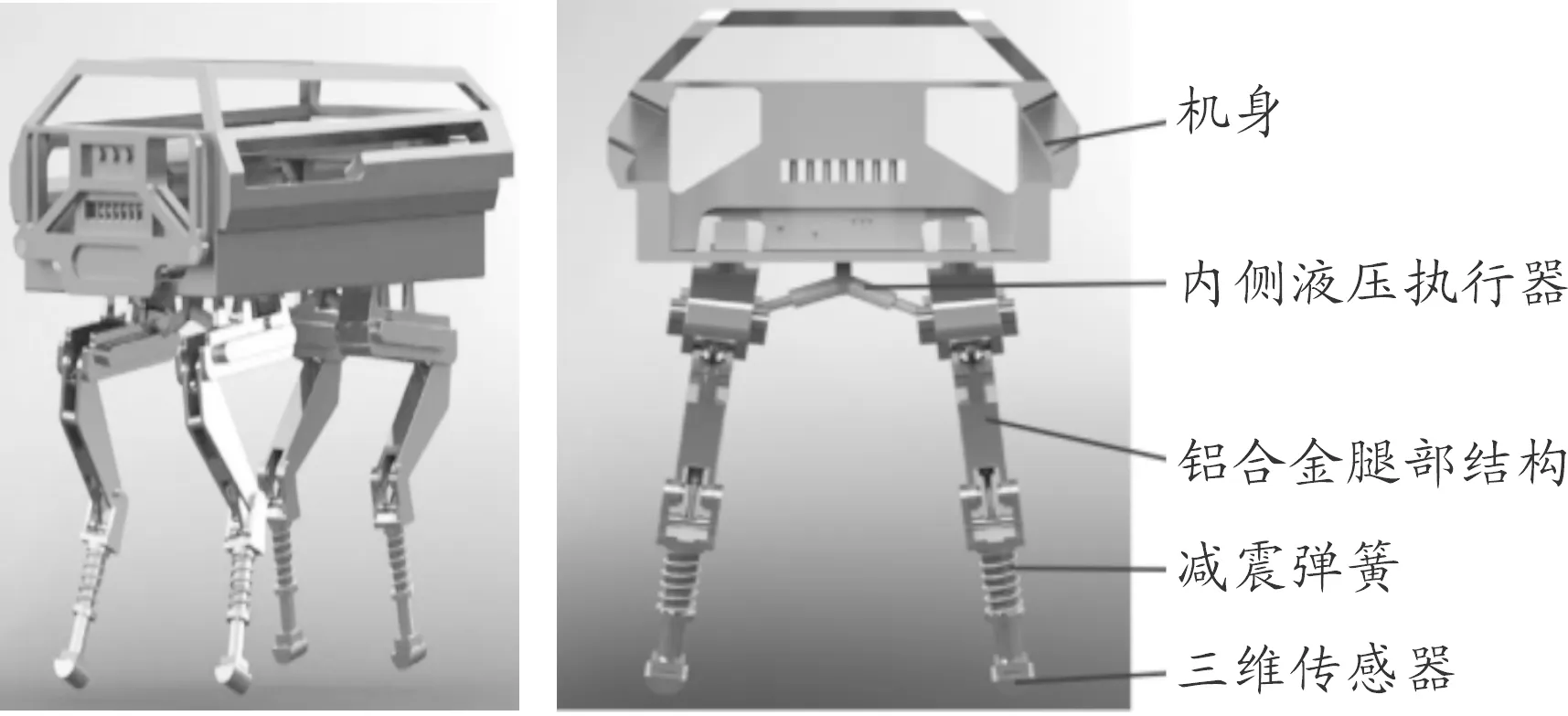
图9 液压四足机器人腿部创新方案
4 结论
采用设计结构矩阵与分支拓扑树结构相结合的方法,对存在冲突的元件进行聚类模块化,对于多种方案综合考虑冲突指数与内聚度,并将其作为方案遴选的评价依据,同时利用分支拓扑树结构确定最优粒度层级,对最优方案进行再次子模块划分,优化产品配置。通过液压四足机器人腿部结构的案例分析,说明了基于设计结构矩阵与分支拓扑树结构的产品模块划分方法和有关的评价指标的适用性,可以改善产品设计,创新产品方案。
猜你喜欢
传感器世界(2022年6期)2022-11-25
家用电器(2022年7期)2022-07-13
黑龙江大学自然科学学报(2022年1期)2022-03-29
计算机系统应用(2021年10期)2022-01-06
科技与创新(2019年16期)2019-08-26
学生天地(2019年28期)2019-08-25
中学生数理化·中考版(2016年7期)2016-12-07
伴侣(2016年8期)2016-08-11
恋爱婚姻家庭(2015年27期)2015-12-19
恋爱婚姻家庭·养生版(2015年9期)2015-05-14