地铁隧道管片背后脱空及渗水病害检测方法
2019-08-14 04:29许献磊李俊鹏
铁道建筑 2019年7期
许献磊,马 正,李俊鹏,梁 爽
(1.中国矿业大学(北京) 煤炭资源与安全开采国家重点实验室,北京 100083;2.北京城建勘测设计研究院有限责任公司,北京 100083)
随着城市化进程的加快发展和城市规模的不断扩大,地铁已成为解决城市交通问题的有效途径。以北京市为例,截至2018年地铁的运营线路总里程已经达到 600 km,我国地铁建设已进入了快速发展阶段[1-3]。地铁的大量建设也产生了一些工程技术难题,如由于设计、施工等原因,地铁隧道管片背后常出现脱空和渗水病害,伴随混凝土退化、钢筋锈蚀、衬砌背后土压力的变化等相关问题的产生,从而导致隧道塌方、涌水、涌泥等灾害发生,给地铁隧道的施工和运营造成极大危害[4-7]。因此,如何对地铁隧道管片后脱空及渗水病害进行检测并实现对病害属性的划分,是控制施工质量、消除质量隐患、保障地铁运营安全的关键。
盾构隧道的注浆处理是在一定的注浆压力下,将注浆材料填入盾尾空隙内,待其固结硬化后起到充填管后结构空隙、提供一定承载能力、防止围岩或土体松弛下沉作用[3,8]。造成隧道管片背后脱空和渗水现象的主要原因有:①施工工艺。误认为围岩压力是由管片承受而注浆仅起到辅助作用,错误思想导致了施工马虎,产生了注浆不密实等缺陷。②混凝土收缩。施工时对原材料质量控制不严,砂粒过细、水泥用量过大、混凝土水灰比过大等都对混凝土收缩产生影响。③围岩压力。隧道局部地段围岩性状变化和地下水富集,对隧道结构产生不利影响[9-11]。物探技术的快速发展为地铁隧道管片后脱空及渗水病害检测提供了重要手段,其中探地雷达(Ground Penetrating Radar,GPR)技术是一种用电磁波反射来确定隐蔽目标体的技术,并以其无损、快捷以及浅层高分辨率的优势被广泛应用于工程地质及隧道工程病害检测中。2005年叶良应[10]对地铁隧道病害进行了探地雷达探测研究,2007年张丰收[11]对盾构隧道探地雷达探测的介电特性和实际应用进行了研究,2012年张弛[12]应用探地雷达在成都2号线对盾构施工扰动带进行了探测。2018年Amir等应用探地雷达对隧道上方结合点的结构进行探测,为维修提供信息[13]。因地铁隧道的特殊性和隐蔽性,目前基于GPR的管片后病害检测仍然存在检测精度低、属性难以划分的问题。
本文针对上述问题开展管片后的脱空和渗水病害检测方法研究,通过正演模拟分析管片后脱空和渗水病害的雷达波反射特征,在此基础上研究病害的识别算法以及病害属性划分的标准,将不同种类病害分级以指导施工修复。
1 地铁隧道管片后病害检测原理
GPR是一种对介质表面下的特征高辨识率成像的电磁波技术,其工作原理如图1所示[14]。该技术通过天线连续拖动的方式向隧道管片的外法线方向发射高频电磁波,电磁波信号在传播时遇到存在电性(介电常数)差异的界面时,会反射、透射和折射。反射的电磁波被与发射天线同步移动的接收天线接收后,通过雷达主机精确记录反射回的电磁波的运动特征,获得隧道管片背后介质的断面扫描图像,通过对扫描图像进行处理和图像解译,达到识别管片后脱空和渗水病害目标体的目的。
电磁波的传播取决于介质的电性,介质的电性主要有电导率μ和介电常数ε,前者主要影响电磁波的穿透深度,在电导率适中的情况下,后者决定电磁波在该物体中的传播速度。因此,所谓电性界面也就是电磁波传播的速度界面。不同的地质体(物体)具有不同的电性,在不同电性的地质体的分界面上都会产生回波。电磁脉冲波旅行时间t为
(1)
式中:z为勘查目标体的埋深;x为发射、接收天线的距离(因z>>x,故x可忽略);v为电磁波在介质中的传播速度。
2 管片后病害的雷达特征分析
地铁隧道管片后病害出现的位置主要集中在隧道壁后1 m范围以内的区域,参见图1。该区域可分为3层:管片层(30 cm)、注浆层(约30 cm),岩/土层(约40 cm),管片背后脱空和渗水病害常出现在注浆层和岩/土层中或管片层和注浆层的交界位置。实际情况中,隧道结构的各层介质材料均为非均匀色散介质,电导率和介电常数均存在一个变化范围[15]。为了简化模型,本文在进行空洞正演模拟过程中设定:
1)选取的各层介质的电导率和介电常数均为确定值,见表1。

表1 隧道正演模型参数
2)管片为钢筋混凝土结构,为了更好地获取病害的雷达特征,在进行正演模型搭建时去掉了钢筋以避免钢筋带来的干扰[16]。
基于表1中的参数,分别建立了不同大小、不同深度的隧道管片后脱空和渗水病害共16个,并利用GPRMax软件进行正演模拟。基于上述2种病害目标对其不同大小和不同深度分别进行建模,脱空病害区域中的介质均为空气,渗水病害区域中的介质为水土混合物,其他条件均相同。因雷达波的穿透深度主要取决于地下介质的电性和中心频率,本研究主要应用400,900 MHz 2个频率进行正演模拟。
2.1 脱空病害的正演模拟
分别对不同埋深、宽度和高度的脱空区域进行建模对比,见图2。所得探地雷达图像见图3。

图2 脱空病害正演模型

图3 以A扫描道组合形式呈现的脱空病害雷达图像
由图3可见:管片层、注浆层及岩/土层3层的分层特征较为明显,脱空病害在雷达图像上均呈现为开口向下的抛物线状,电磁波穿越空洞模型时产生多次反射,并有绕射发生;对于同尺寸脱空病害模型,随着其埋深的增加,抛物线在雷达图像中呈现整体向下偏移的情况,且抛物线顶端的振幅值逐渐减小;在其他条件相同的情况下,抛物线的曲率随着脱空病害模型宽度的减小而逐渐增大;在其他条件相同的情况下,随着脱空病害高度的增加,模型底面在雷达图像中的反射界面也随之向下偏移,绕射和反射现象也愈加明显。另外,相较于400 MHz雷达图像,900 MHz雷达图像有更高的分辨率,细部信息更加丰富,层位及异常顶底界面更加明显。
2.2 渗水病害的正演模拟
分别对不同埋深、宽度和高度的渗水区域进行建模对比,见图4。所得探地雷达图像见图5。

图4 渗水病害正演模型
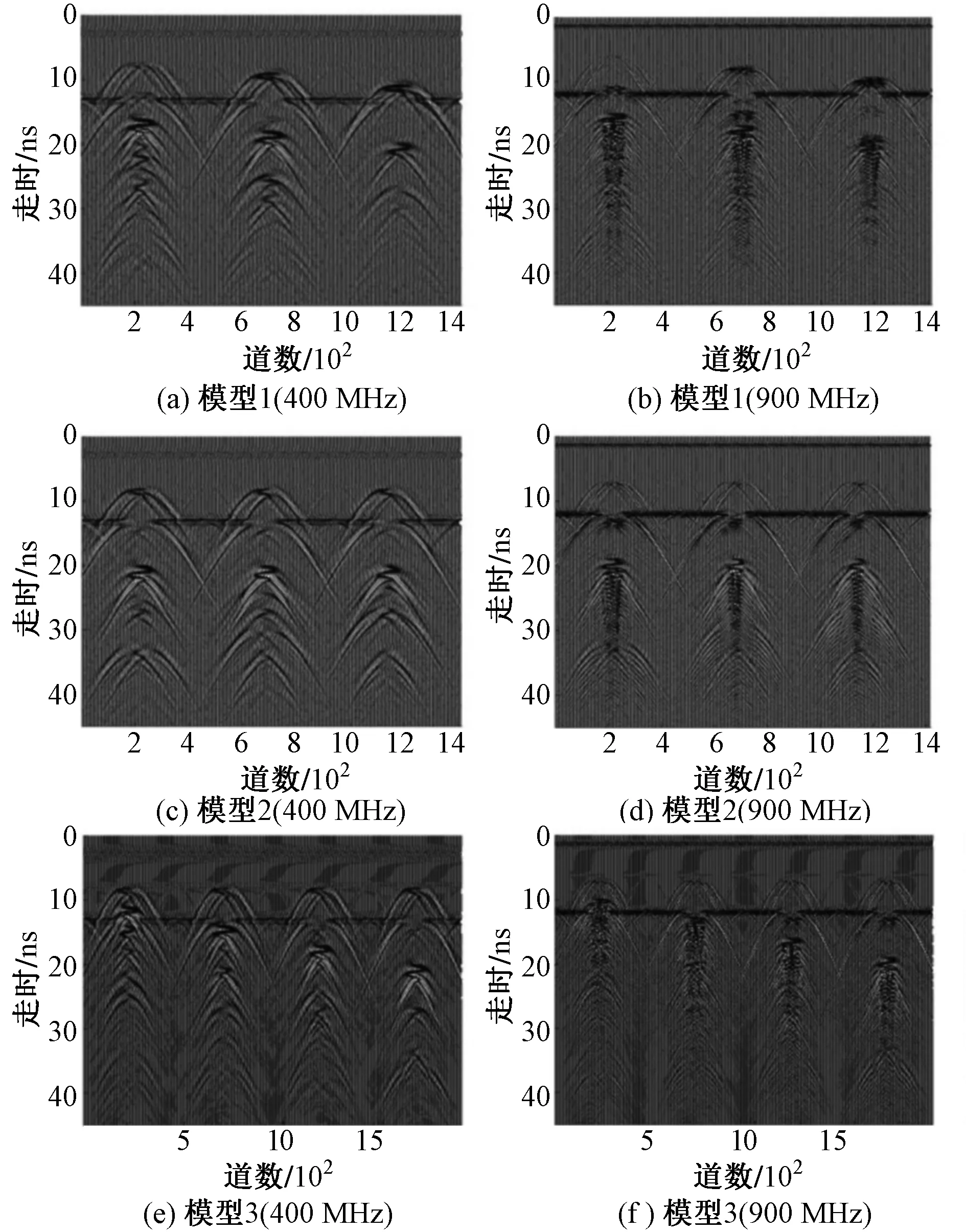
图5 以A扫描道组合形式呈现的渗水病害雷达图像
从图5可以看出:管片层、注浆层及岩/土层3层的分层特征较为明显,渗水病害在雷达图像上均呈现为开口向下的抛物线状,电磁波在穿越渗水病害时产生明显绕射,病害体内多次反射现象在雷达图像中不明显;对于同尺寸渗水病害模型,随着其埋深的增加,抛物线在雷达图像中呈现整体向下偏移的情况,且抛物线顶端的振幅值逐渐减小;在其他条件相同的情况下,抛物线的曲率随着渗水病害模型宽度的减小而逐渐减小;在其他条件相同的情况下,随着渗水病害模型高度的增加,模型底面在雷达图像中的反射界面也随之向下偏移,绕射现象也愈加明显。另外,相较于400 MHz 雷达图像,900 MHz雷达图像有更高的分辨率,细部信息更加丰富,层位及异常顶底界面更加明显。
3 管片后病害的识别与属性划分
3.1 病害的识别
对采集的雷达数据首先进行如下处理:①零线设定;②背景去噪;③一维滤波;④小波变换;⑤增益处理。从处理后的雷达图像即可确定病害可能出现的区域,然后对该区域进行识别和分析,判断该区域是否存在病害并且属于哪一种可能的病害。探地雷达数据病害信息的识别首先要对原信号进行必要的分解,以便于获取信号中反映隧道管片背后脱空和渗水病害信息的特征指标。本文主要采用K-L变换的信号分解方法。然后再利用追踪算法,实现病害的识别。核匹配追踪方法是通过贪婪算法在基函数字典中寻找一组基原子的线性组合来逼近目标函数,该线性组合即为所要求解的决策函数[17-18]。
已知测量N次的样本数据为(x,y),其中x,y均为N维向量。目标是通过一种方法找到x与y之间的映射关系。匹配追踪算法将这种关系定义为若干基函数的线性组合,即
(2)

令函数gi=K(x,y),K(x,y)为核函数。常见的核函数有高斯核函数、多项式核函数、S形核函数等。本文采用的高斯核函数为
(3)
核匹配追踪方法的基本流程为:首先将训练数据从输入空间映射到高维希尔伯特空间中,通过计算样本间的核函数值来代替样本在高维空间中的向量内积,并由相应的核函数值生成基函数字典,最后采用贪婪算法求解。根据本文的病害识别方法,对脱空病害和渗水病害的正演模拟结果进行处理。识别结果见图6(以模型1为例)。
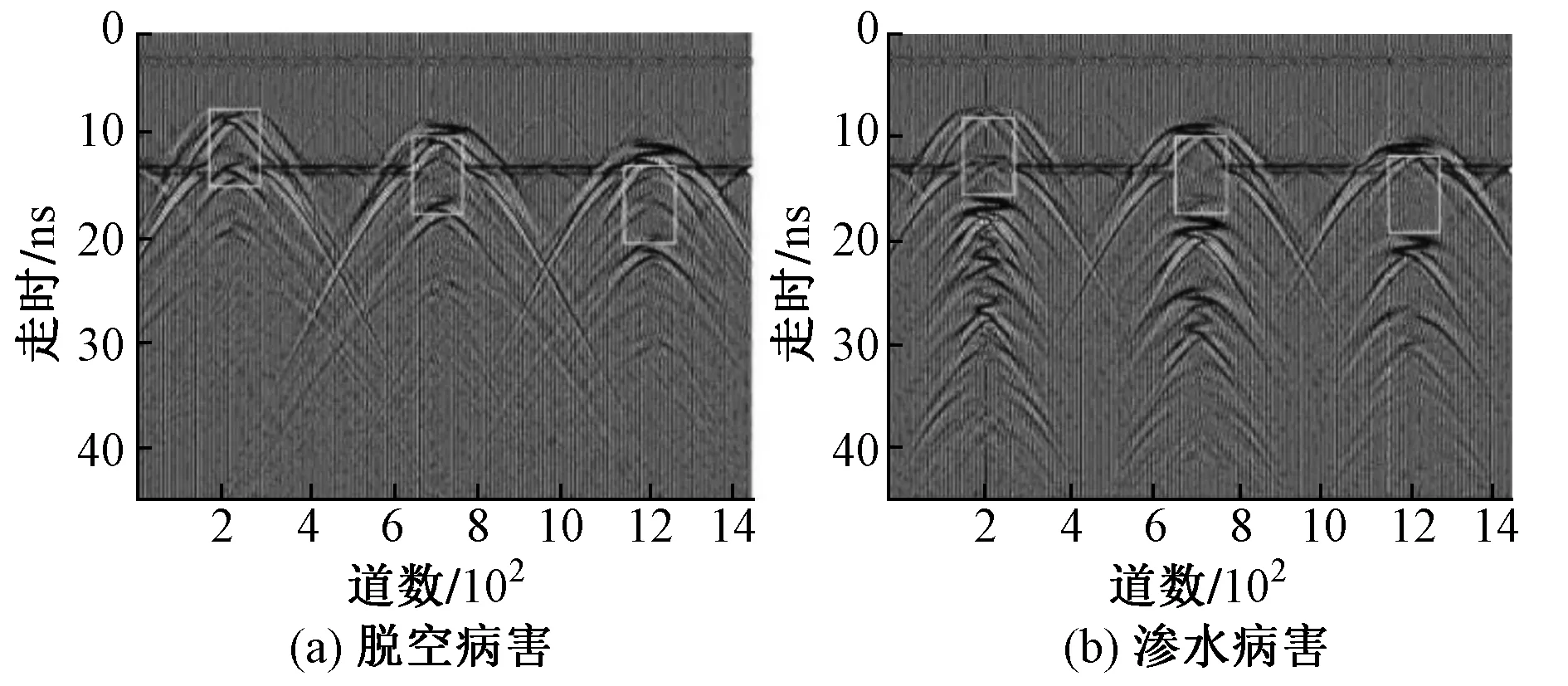
图6 病害模型识别结果
3.2 病害属性划分标准
地铁隧道各层介质的地球物理特征决定了电磁波在其中传播的形态,因此探测区域介质的地球物理特征是地质雷达检测成果解释的重要依据。当隧道管片背后出现病害时,“混凝土、水、岩/土”三相比也会相应发生变化,相对介电常数的变化成为探地雷达方法检测病害的理论依据之一[19]。
目前数据解释暂无法给隧道病害进行分类,异常区域解释结果基本采用脱空、含水等笼统概念,解释结果无法直接有效指导施工修复方案。根据现场普查分析和试验,本文在分析综合资料的基础上,将地铁隧道管片背后病害属性划分为6个类别:轻微疏松、中等疏松、严重疏松、脱空、一般渗水、严重渗水,判断的依据为雷达回波的波组形态、振幅和相位特性、吸收衰减特性等。
隧道病害属性及其图谱特征见表2。其中,脱空区域属于严重缺陷异常,包括隧道支护空洞,空洞会导致围岩失去应有的支护而松弛变形,导致失稳脱落,严重会发生突变性崩塌。疏松区域结合其规模和影响范围可划分为轻微疏松、中等疏松和严重疏松3级。渗水异常根据其发育规模以及危害程度可分为一般渗水异常和严重渗水异常。
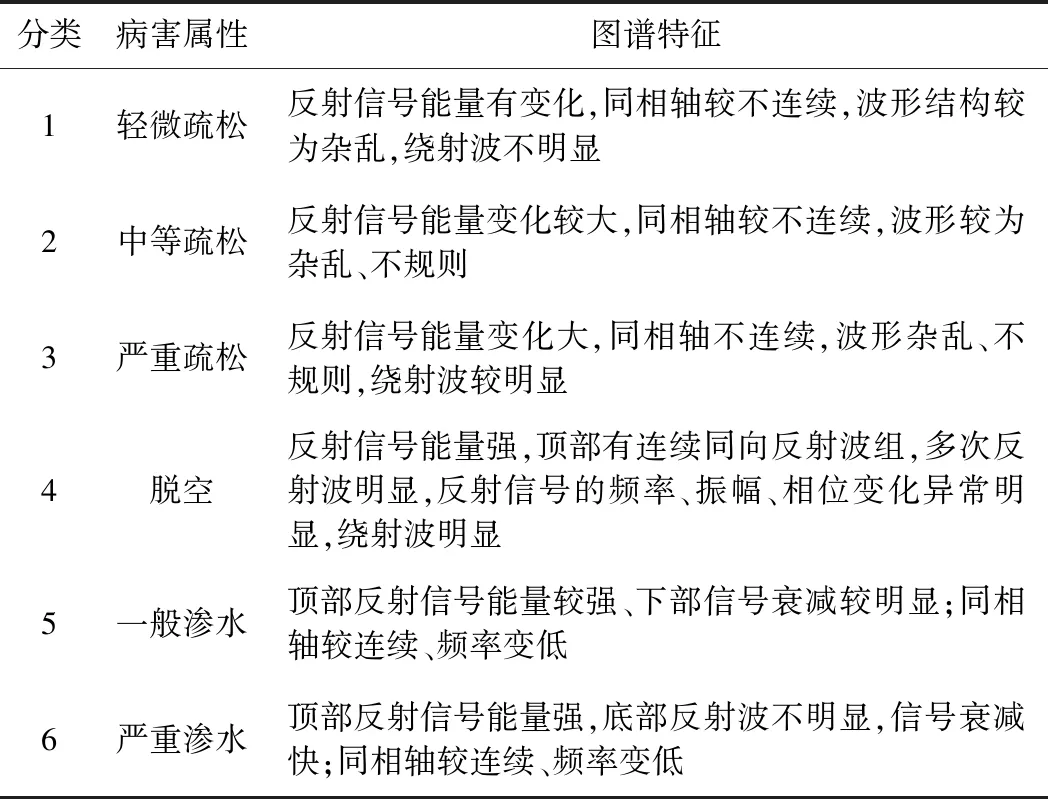
表2 病害属性划分标准
4 探测应用试验
4.1 数据采集
为验证地质雷达对地铁隧道管片后病害探测的效果,本研究选择厦门地铁2号线的湖滨中路站至育秀东路站段进行探测试验。该段隧道左侧紧邻筼筜湖,距离湖岸30 m,施工15 d后发现部分隧道管片表面出现渗水现象,见图7(a),现场雷达数据采集见图7(b)。

图7 试验区现场
本次探测采用的仪器为中国矿业大学(北京)自主研发的GR-IV型便携式探地雷达主机和400,900 MHz 雷达屏蔽天线,仪器见图8。雷达数据采集的相关参数设置如下:①天线中心频率为400,900 MHz;②采样时窗分别为70,25 ns;③采样点数为512;④共设置测线4条,在隧道两侧各布置2条测线,分别在隧道的上肩部和中部,4条测线呈对称分布。

图8 探地雷达仪器
4.2 探测结果
对采集的雷达数据依次进行数据预处理和病害识别。其中,根据厦门地铁的实际情况,本研究中的管片层、注浆层、岩/土层的相对介电常数分别设置为6,8,15。以测线1(右上肩)和测线4(左中)为例,处理后的探地雷达图像见图9。
对处理后的探地雷达图像进行病害识别,结合现场调查并排除各种干扰信号引起的异常后,按照3.2节病害属性划分标准对病害属性进行判定,本探测试验结果为:共检测出异常区域23处,其中渗水异常区域13处,脱空异常区域10处。测线1检测出4处渗水异常区和3处脱空异常区;测线2未发现明显异常区;测线3检测出3处渗水异常区和3处脱空异常区;测线4检测出6处渗水异常区和4处脱空异常区。
5 结论及建议
针对目前GPR技术在地铁隧道管片背后脱空和渗水病害检测中存在的受干扰影响大、检测精度低的难题,提出了一种地铁隧道管片背后病害的快速探测方法。同时,根据雷达回波波组形态、振幅和相位特性、吸收衰减特性等方面特征,初步建立了管片背后脱空和渗水病害属性划分标准,进而将不同种类病害分级以指导施工修复,为保障地铁隧道施工及运营安全提供有效的技术支撑。
目前,本方法还存在如下问题:
1)受现实条件的制约,地铁隧道内的探测结果并不能全部进行实际验证。
2)病害属性划分还需人机交互进行,一定程度上依赖于作业者的经验。
未来应从改进病害识别算法、病害属性自动划分两方面着手,通过构建合理的物理模型来研究并实现对地铁隧道管片背后病害的快速、精准探测,为施工修复提供更好的服务。
猜你喜欢
房地产导刊(2022年10期)2022-10-18
北京航空航天大学学报(2022年7期)2022-08-06
水科学与工程技术(2022年3期)2022-07-18
中学生数理化(高中版.高考理化)(2022年5期)2022-06-01
中学生数理化(高中版.高考理化)(2021年5期)2021-07-16
铁道学报(2021年4期)2021-05-13
科技研究·理论版(2021年20期)2021-04-20
空间科学学报(2021年6期)2021-03-09
雷达学报(2021年1期)2021-03-04
雷达学报(2017年6期)2017-03-26