
FSEC 电动方程式赛车动力系统设计*
2019-08-15 16:02郭笑赵勇吴凡玲杨亚东金晨沈辉
汽车实用技术 2019年15期
郭笑,赵勇,吴凡玲,杨亚东,金晨,沈辉
(扬州大学机械工程学院, 江苏 扬州 225008)
1 FSEC 电动赛车动力系统设计意义
本课题通过创新驱动的方式和不断优化结构及性能参数,设计出更适合FSEC 电动赛车的动力系统,可以为后续的FSEC 电动赛车动力系统设计与研究提供参考。
2 FSEC 电动赛车动力系统结构
2.1 FSEC 电动赛车动力系统各部件布置方式
本系统采用的轮毂电机为内转子减速型,内转子轮毂电机将电动赛车的动力、减速、传动、制动装置整合到轮毂内,从而使FSEC 电动赛车的机械部分大为简化,进而提高传动系统部件传动效率,最终使FSEC 电动赛车能更好的适应比赛赛道。
2.2 FSEC 赛车性能指标参数
2.2.1 电机参数计算
(1)满足FSEC 电动赛车最高车速所需的轮毂电机的峰值功率通过:

式中Pvm[1]处于84 km/h 时的功率,Vm最高车速,μ 机械传动效率,m 整车质量,g 重力加速度,fa赛车滚动阻力系数,Ca空气阻力系数,S 迎风面积。
(2)选择内转子电机参数如表1。
2.2.2 电池组参数
电机额定功率为220 V,电池组采用多节18650 锂电池串联方式,18650 电池电源电压为3.7 V,所以,所需串联电池数量为节,两组60 个18650 锂电池串联后,再并联的电池包。FESC 赛车在只受空气阻力和行驶阻力的条件下所消耗的能量[2]为:
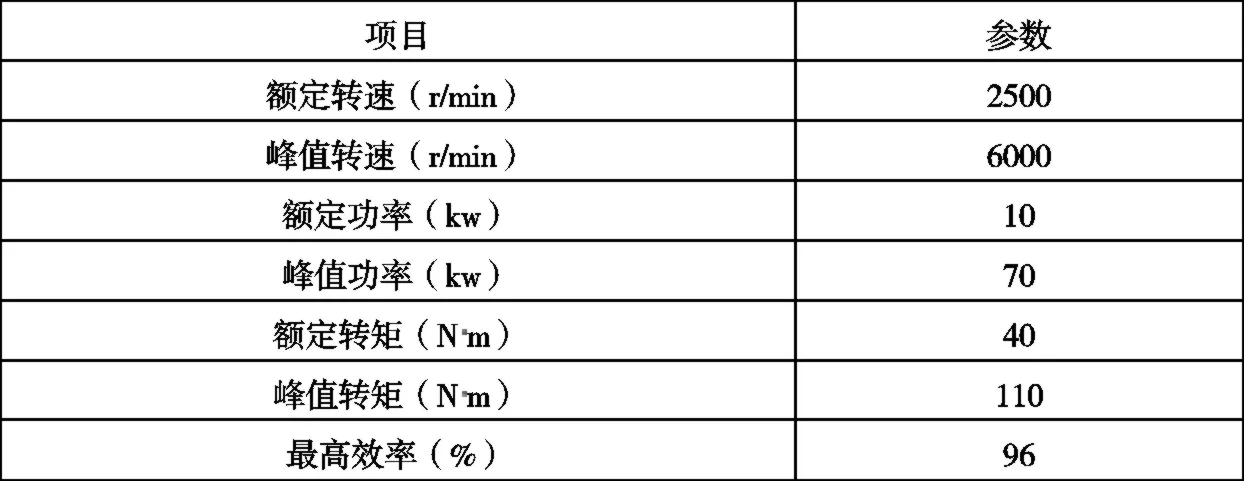
表1 轮毂电机参数表

2.3 双轮毂电机电动赛车控制策略
FSEC 电动赛车使用的轮毂电机,可直接对差速进行控制来实现过弯。Ackerman 函数计算模型如图1 所示。
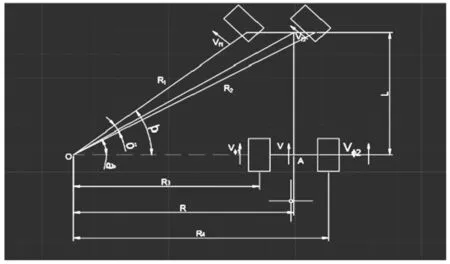
图1 Ackerman 函数计算模型
O 为瞬时转动中心;â 和Ö 分别是左前轮转角和右前轮转角;þ 为转向轮转角;L 为前后轴轴距;B 为后轮距;R 为后轴中心点处的转向半径;v 为后轴中心点的速度;R1、R2分别为左前轮和右前轮速度。
利用速度瞬心法可得到:

利用轮毂电机实现电子差速控制转向流程。
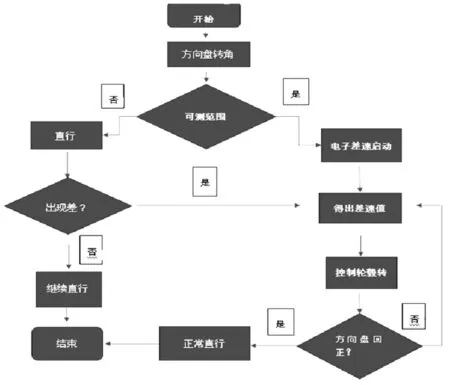
图2 电子差速控制转向流程图
3 FSEC 电动赛车整车性能仿真
3.1 全负荷加速性能仿真结果及分析
启动时加速度最大,为8.4 m/S2,之后加速度基本保持不变(稍有降低)直至速度达到45 km/h 左右时,加速度开始随速度的增大而线性降低,直至速度达到峰值。
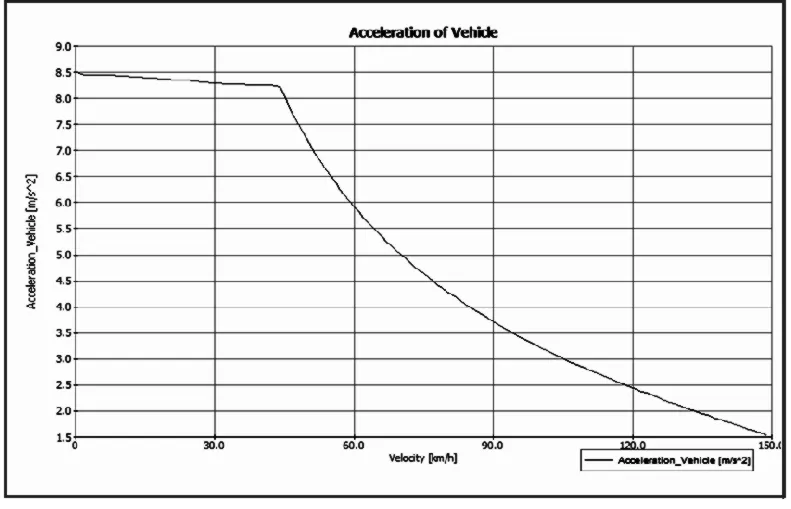
图3 FESE 赛车加速度与速度的变化关系图
3.2 赛道工况仿真结果及分析
在行驶过程中,赛车的速度在28.0km/h-84.0km/h 范围内波动,峰值速度可达到84.0 km/h。加速度转变效率高,最高可达6.3 m/S2,可快速实现加减速。
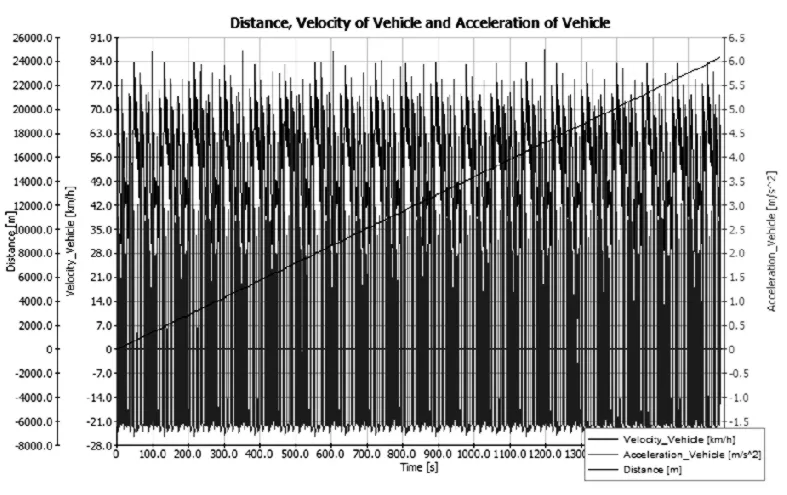
图4 FSEC 赛车在赛道工况下的加速度、速度与里程的关系图
3.3 循环工况仿真结果及分析
启动时加速度最大,达到8.5 m/S2左右,因此速率增大幅度大,在1.3 s 左右后,速度达到40 km/h 左右,加速开始随时间推移而线性降低,导致速度的增大幅度有所减缓。当加速度降至3.2 m/S2左右时,保持着较低的加速度直至速度达到峰值。
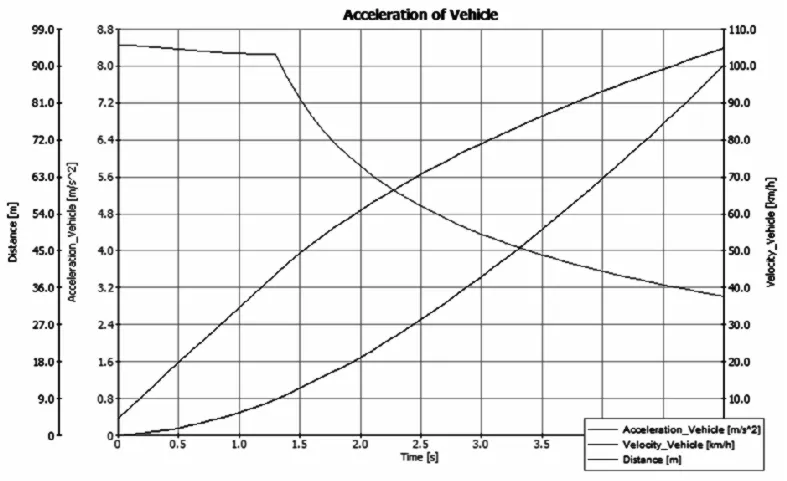
图5 FESC 赛车在循环工况下的加速度、速率和里程随时间的变化关系图
4 小结
本课题依托扬州大学FSEC 电动赛车研发项目,设计了双轮毂电机驱动的动力系统制策略,最后在Cruise 软件中进行仿真。结果表明,赛车启动加速度为8.4 m/S2,最高车速达到84 km/h,证明所设计动力系统能满足赛车性能需求。
猜你喜欢
农业装备与车辆工程(2022年2期)2022-10-30
中国畜牧杂志(2022年10期)2022-10-12
汽车实用技术(2022年5期)2022-04-02
汽车实用技术(2021年3期)2021-02-24
现代计算机(2020年12期)2020-06-08
小学生学习指导·爆笑校园(2019年6期)2019-09-10
红蜻蜓(2015年11期)2016-02-02
中国自行车·骑行风尚(2014年4期)2014-10-10
