基于改进粒子群和变步长扰动的复合MPPT算法
2019-08-17 08:00李科娜杨儒龙高学瑞
重庆理工大学学报(自然科学) 2019年7期
李 山,李科娜,陈 艳,杨儒龙,高学瑞
(1.重庆理工大学 电气与电子工程学院, 重庆 400054;2.重庆市能源互联网工程技术研究中心, 重庆 400054; 3.滨州渤海活塞有限公司, 山东 滨州 256600)
传统化石能源的利用会造成环境污染,并面临资源枯竭,能源革命席卷全球。太阳能是可再生能源利用增长较快的领域之一。
光伏电池的功率曲线在局部阴影条件下(PSC)会呈现多峰值的情况。而传统的MPPT算法无法解决陷入局部最优的问题,使系统遭受严重的功率损失,因此研究PSC下的最大功率跟踪技术是提高太阳能利用效率的核心之一[1-5]。
MPPT技术在光伏领域受到国内外学者的广泛关注。一些算法被相继提出,包括扰动观察法(P&O)、电导增量法(INC)、模糊逻辑控制法和神经网络控制法。针对以上方法的不足,国内外学者引入进化算法、智能优化算法与传统算法结合的复合寻优方法。粒子群优化(PSO)由于其结构简单,易于实现,具有快速的计算能力,从而具有很高的潜力[6-7]。文献[8-10]研究结果为基于粒子群算法的MPPT不存在稳态功率震荡的问题,但存在稳态不收敛和陷入局部极值的问题,给系统造成了一定的功率损失。
针对以上问题,本文提出了改进的粒子群算法-休眠粒子群算法结合变步长扰动的复合算法。该算法对传统的粒子群算法进行结构调整、参数优化。第1阶段,DPSO算法寻找到全局最优值附近;第2阶段,爬山法快速找到峰值,维持稳定输出。本文首先从几个方面详细分析改进的DPSO复合算法,然后结合Matlab/Simulink和Saber进行协同仿真,分析动态静态条件的仿真结果,最后的结果证明了该算法的可行性。该算法相比传统的PSO算法,收敛时间缩短,静态、动态跟踪性能理想。
1 改进的粒子群算法(DPSO)结构及参数的调整
1.1 DPSO结构
粒子在搜索过程中,会出现以下3种现象:吞并休眠、震荡休眠、顶端休眠[11]。为了避免这3种现象造成搜索速度较慢、迭代次数增多及功率损耗,该算法在结构和参数方面进行了合理的调整。由于随机数r的取值大多与研究者的经验相关,而且PSC下的P-U特性曲线不算复杂,故可忽略r的影响,决定去除该环节。则寻优迭代式变为:
(1)
(2)
(3)
pgb=max{f(plb_1),f(plb_2),…,f(plb_Np)}
(4)
1.2 自适应权重因子
权重因子的值体现了粒子之前的速度值在新的速度值中的权重。当遇到局部峰值时或当粒子陷入某些局部最小值时,权重因子有助于保持粒子移动。存在的问题是若权重因子的值保持不变,因为粒子速度具有非零值,即使所有粒子已汇聚到GP,也会导致持续的振荡,为了保持权重因子的优点以及减少其对算法收敛的负面影响,提出了自适应权重因子。这种自适应权重因子的值取决于粒子在搜索空间中的传播速度。自适应权重因子如下:
(5)
式中:w是第k个循环迭代周期内的权重因子值;Vmax指搜索空间中最右边的粒子的当前位置;Vmin为最左边的粒子的当前位置;Voc为光伏阵列的额定开路电压。使用这种自适应加权因子的一个优点是程序员不必在每次重新初始化算法时设置其值,使得修改后的算法更加自给自足。
在出版技术市场建设方面,通过“国家出版基金”“改革发展项目库”“出版融合发展重点实验室”等措施的推进,出版技术市场日益成熟,推动了人工智能、大数据、虚拟现实、增强现实等新技术在新闻出版业的充分应用。
1.3 最大搜索速度Vmax限制和粒子数目Np
当P-U曲线中的峰值较大且粒子之间的初始距离较大时,更新速度可能会达到较大的值,这可能导致粒子跳过一些中间峰值,其中一个可能是GP。这将导致错误跟踪GMPP。因此,为了确保在跟踪过程中不会遗漏峰值,更新速度幅值最大值被限制如下:
(6)
Vmax=0.8·Voc/N
(7)
文献[12]利用Matlab进行光伏阵列的仿真。首先对于单串光伏,共有1×10个光伏电池,对其进行局部遮阴,此时对阴影部分的光照强度设置3种模式,分别为遮阴6、3、0个光伏电池。仿真结果显示:模式1有4个模块没有阴影,最大峰值出现在V1= 4×16.3=65 V,其中16.3 V是所使用的光伏模块开路电压(Voc)的80%;模式2有7个模块没有阴影,最大峰值出现在V2=7×16.3=114 V;模式3有10个模块没有阴影,最大峰值出现在V3= 10×16.3=163 V。同时,单个组串峰值出现的位置也决定了整体P-U曲线的局部峰值的位置,模式一、二、三组成的光伏阵列从左到右局部峰值的位置分别对应V1、V2、V3的位置。该结果显示:光伏阵列功率峰值彼此偏移了80%Voc的整数倍(n×0.8×Voc),其中n为整数,由于两组串联组件之间的阴影模块数量的最小差值为1,因此两个连续峰值之间的最小可能位移为0.8×Voc。为了验证该系数的正确性,将Vmax的系数分别设置为不同的值,在三峰值PSC-3阴影环境下分析该粒子群算法的收敛时间和最终达到的功率值,具体的数据如表1所示。
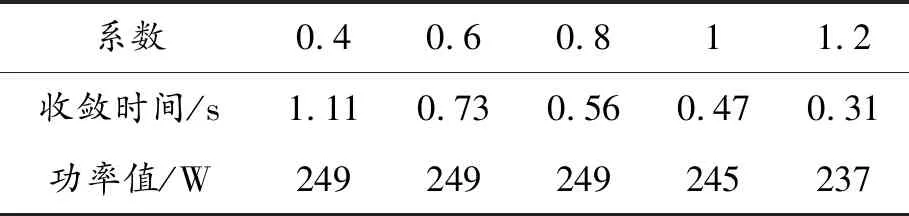
表1 DPSO算法Vmax系数的比较
由表1可以看出:当系数小于0.8时,算法仍然可以收敛到最优值,但是随着Vmax的减小,时间加长;当系数大于0.8时,Vmax增加,收敛时间缩短,但最优值的精度不够。换句话说,算法无法追踪到最优值,只是在最优值甚至局部峰值摆动,综合考虑收敛时间和最优功率值,选择0.8作为最大限制速度的系数。所以PV阵列的P-U特性的连续峰值移动的最大位移近似等于Vmax。此值确保在DPSO算法的搜索空间内不会漏掉任何峰值。N为单串光伏阵列中PV模块的数量。合理大小的粒子数目是优化算法的重要途径,经查找文献,粒子数目设置为3最合理[11]。
1.4 粒子搜索顺序
在粒子群算法中,迭代式(3-6)在每一次迭代周期末尾进行更新,在每个迭代周期内,算法采用不同的搜索顺序对Plb_i、Pgb、Pi、veli的影响并不大,所以对算法的收敛时间和迭代次数无影响。在之前的文献中,粒子搜索顺序并未引起重视,而其在一定程度上对输出电压的波形以及收敛期间的功率损耗有影响。图1为3种常见的粒子搜索顺序以及对应的输出电压波形,是在Simulink中对光伏电池在标准条件下测试所得。图1中显示前4个周期的电压波形,算法的采样周期为0.02 s,当采用粒子数目为5时,每一次迭代周期的时间为0.1 s。由图1可以看出:不同的搜索顺序对应的输出电压波形有很多段是近似的,收敛时间一样,对应的功率损耗较接近,3种损耗分别为45.32、42.69、42.54 W·s,所以顺序1的损耗最大。
顺序1对应的电压波形每个迭代周期都存在一个波峰和波谷,而顺序2的电压波动则缓慢些,顺序3的电压波形变化最缓慢,两个迭代周期才有一对波峰波谷。除此之外,输出电压波形也存在一些毛刺,原因是连续两个采样的粒子之间存在局部极值点,若光伏阵列并联二极管的数目为k,则局部极值数最多为k,在迭代的过程中,跨越的极值点的次数越多,则毛刺越多。顺序1小于2k,顺序2小于k,顺序3大于k。所以对3种不同的搜索顺序从功率损耗、电压波动程度、毛刺数量几个方面进行比较,得到表2所示的结论。

图1 3种不同搜索顺序的电压波形
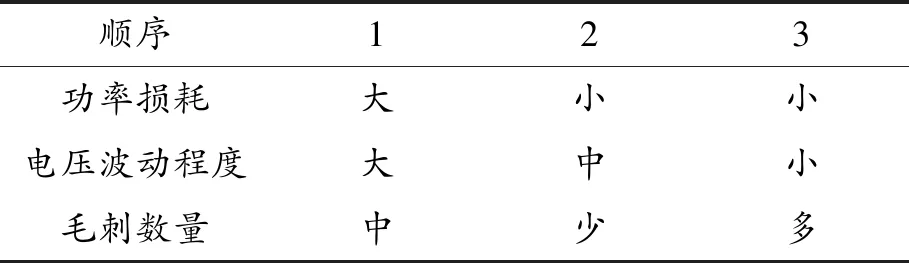
顺序123功率损耗大小小电压波动程度大中小毛刺数量中少多
从表2中可以看出:经过比较,搜索顺序2更为合适,所以本算法采用顺序2进行搜索。
1.5 Fibonacci数列变步长P&O法
当Fibonacci搜索算法在光伏阵列MPPT中应用时,变量x可以看作是光伏阵列的电压或电流,或是功率转换器的占空比D,函数f(x)则为输出功率。
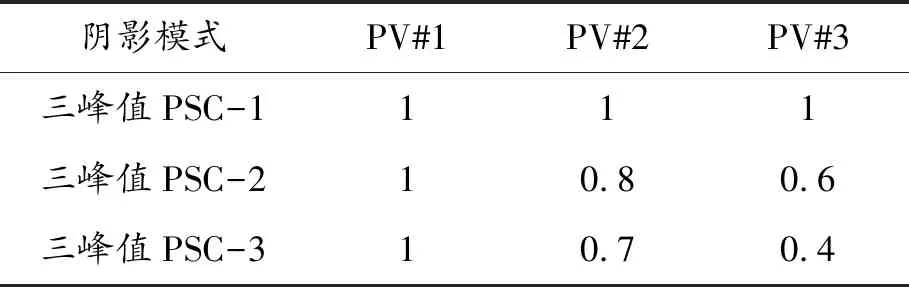
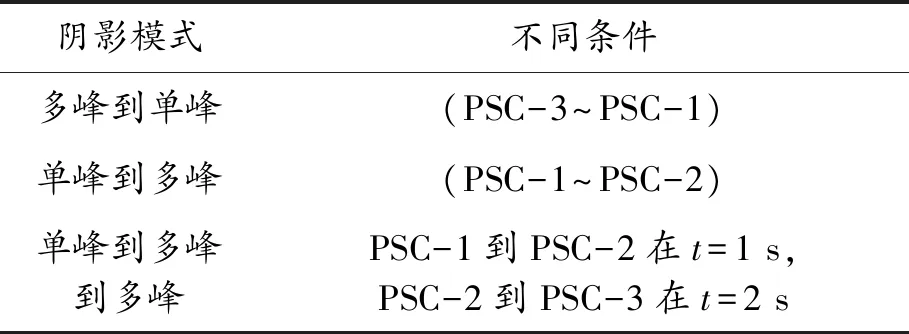
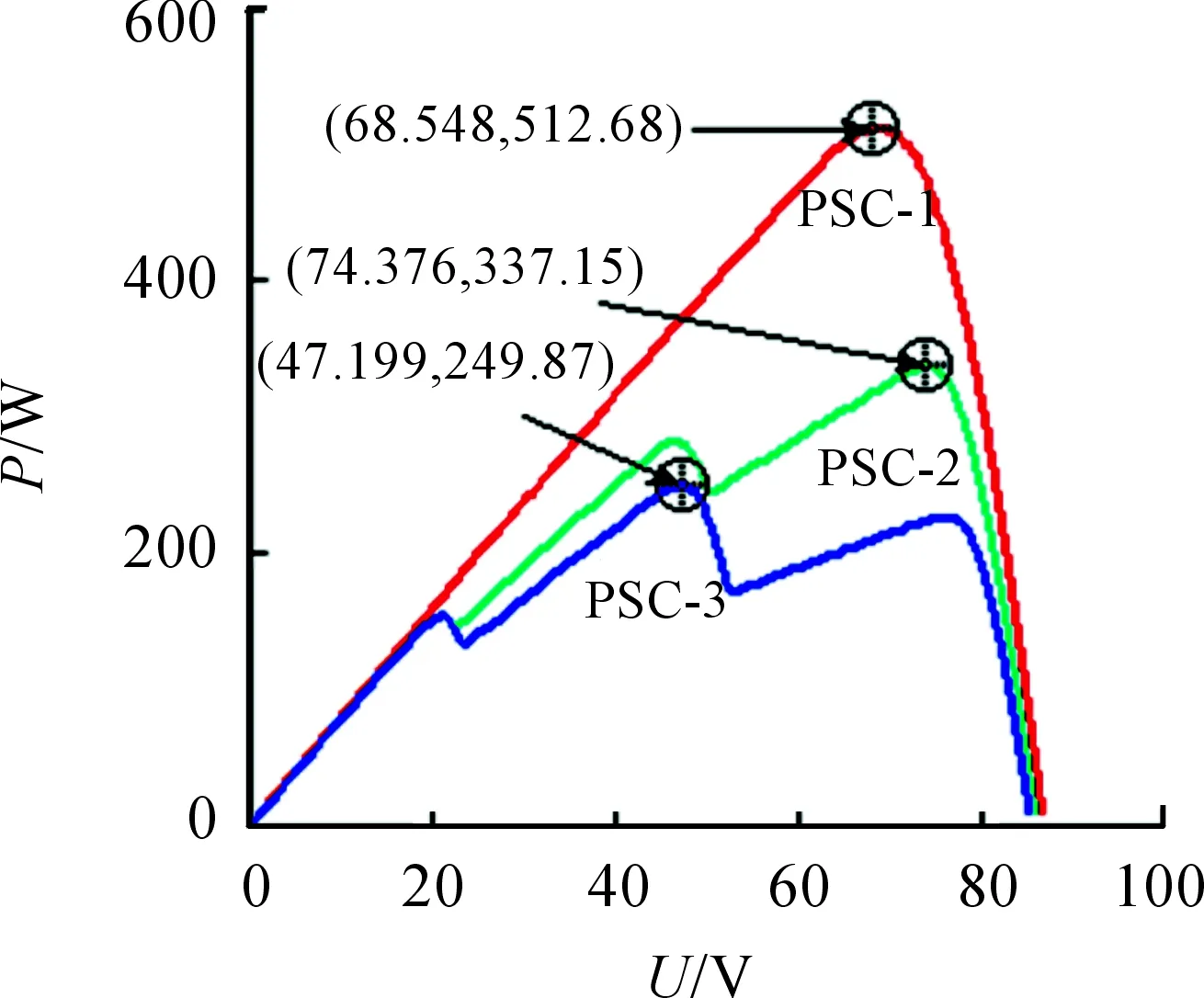
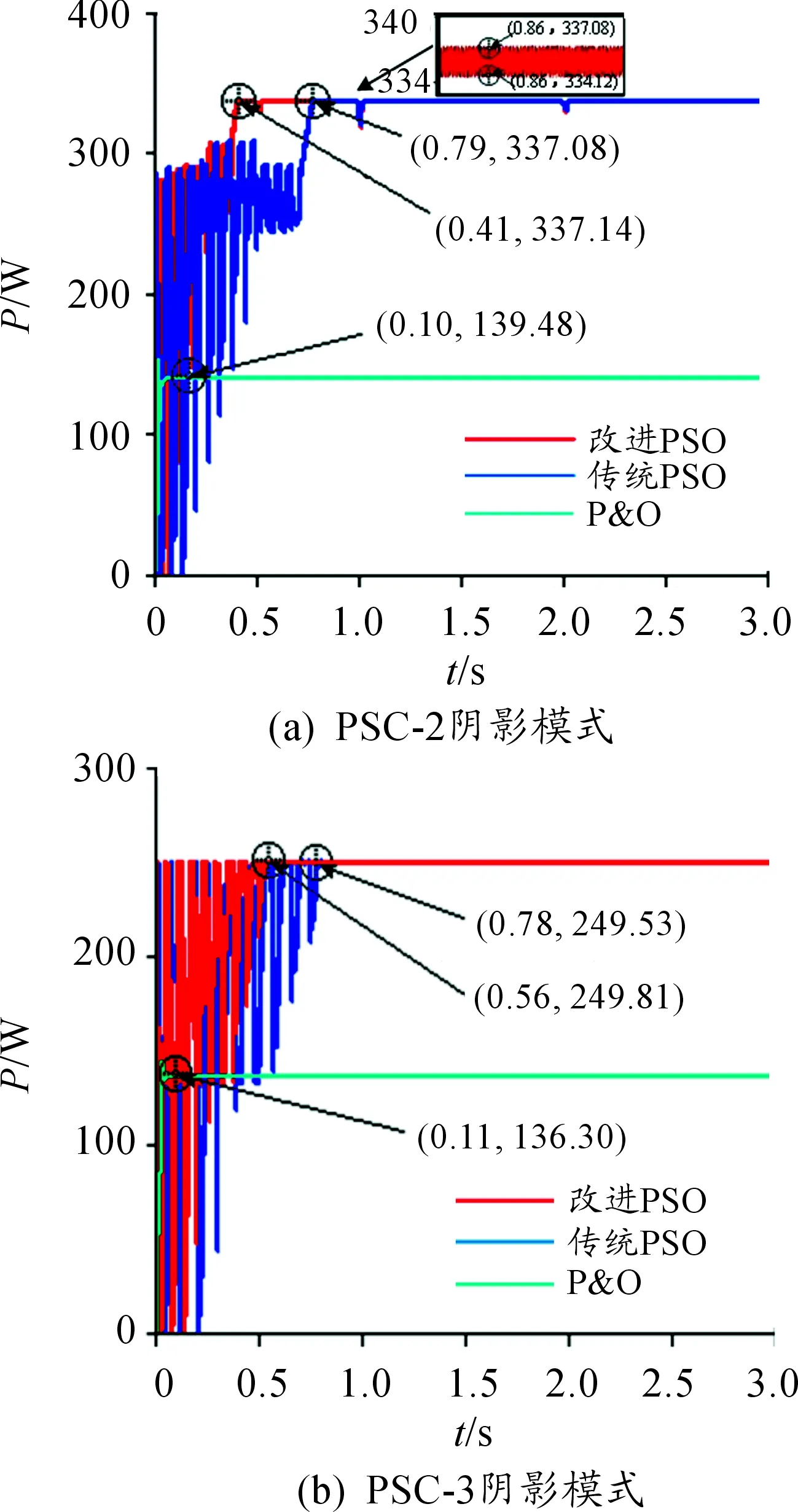
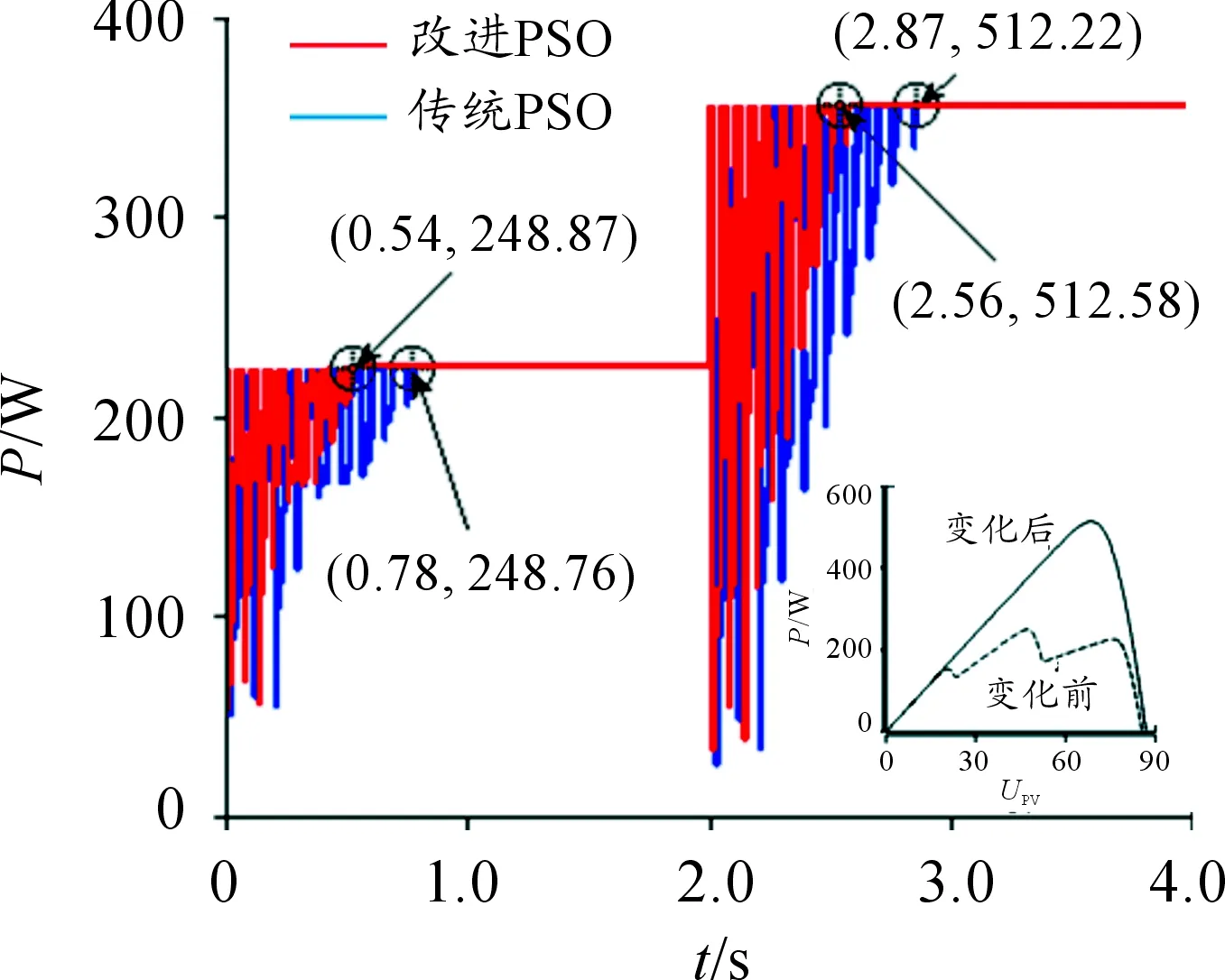
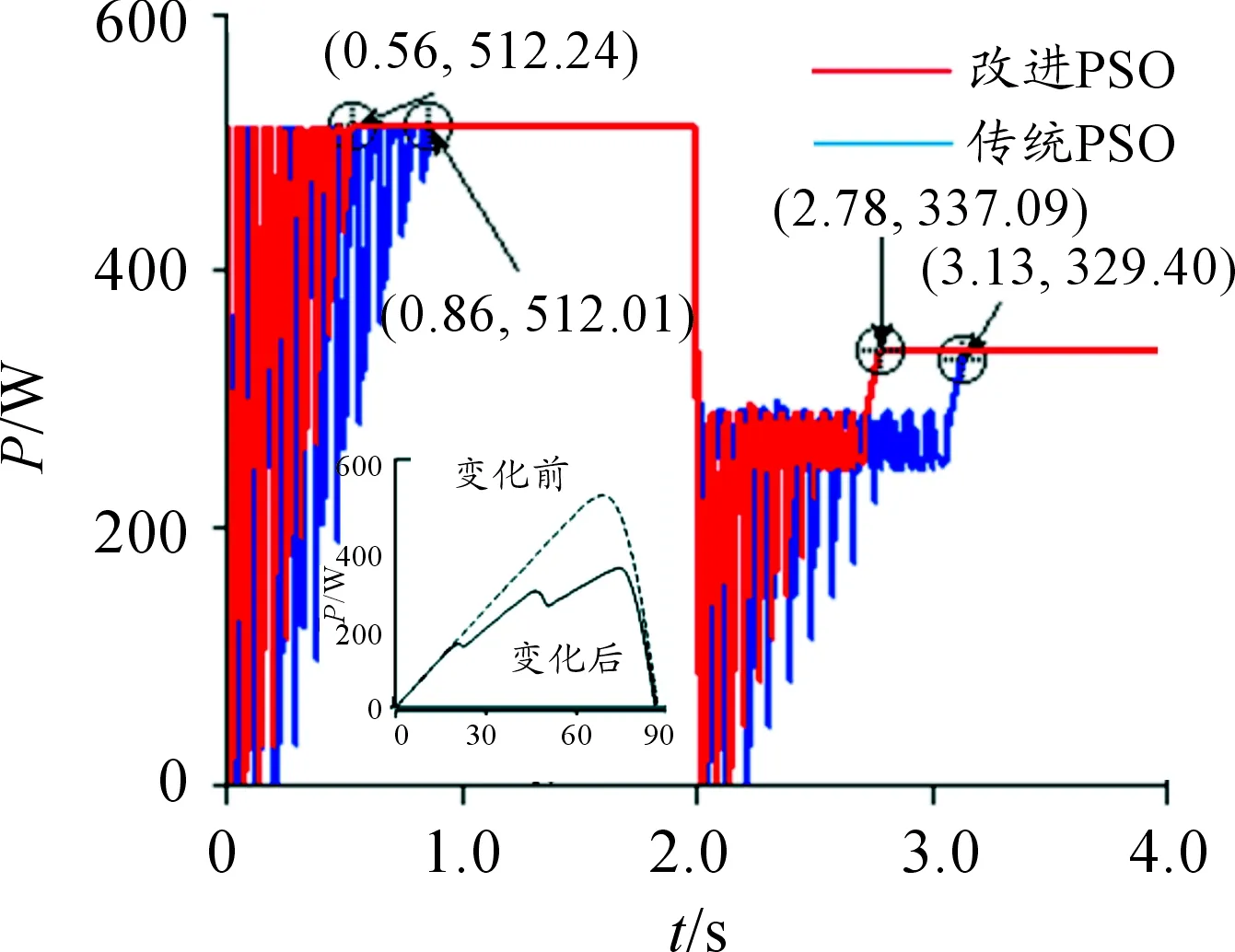
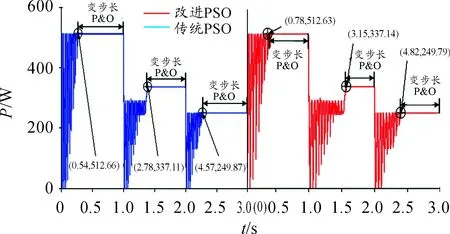
Fibonacci数列搜索算法引入参数x,与占空比D相对应,D=xi/ (2N-1)=xi(N-8)/(256-1),在搜索过程中通过改变x的值,实现占空比从0~1 大范围搜索。i表示采样的次数,比较不同x值处功率大小,确定搜索方向。如果最大点是由于太阳辐射突变而转移到搜索范围之外的,搜索范围必须继续朝同一方向转移。且引入mi来检测向同一方向转移的次数,当连续向同一方向转移次数超过M次且n (8) 式中:d表示本次转移方向;dp表示前一次转移方向,在本次比较之前将d值赋给dp。右移时,d=1;左移时,d=0。调整控制参数M、N影响系统的反应速度和在稳定情况下的振荡幅度。其中M是向同一方向转移的次数,N是限制并扩大搜索范围的最大值。根据经验设M=1,N=8。将DPSO算法的终止值作为第二阶段的初始值,该算法适合局部寻优,可以精准、快速地找到最大功率点。 本算法采用DPSO结合变步长扰动的算法,在第一阶段通过DPSO搜索到GMPP附近,在第二阶段通过变步长扰动算法准确寻找到最大功率点。光伏阵列实际工作时,P-U曲线随环境条件的变化而改变。在这种情况下,必须重新初始化程序再次搜索新的MPP,否则无法自动更新局部极值和全局极值。 |Ui-UGbest|<ΔU (9) (10) 为解决该问题,将原算法增加两个约束条件:① 收敛性检测;② 由增量功率定义的环境突变检测。式(9)的电压变化小于0.05表示算法收敛到了GMPP,程序启动变步长扰动阶段进行跟踪,并维持稳定输出。式(10)的增量功率大于0.02表示环境突变,可能进入局部阴影,需要启动全局DPSO。因此,只要满足以上两个条件,DPSO算法就重新初始化程序。详细的程序流程如图4所示。 图2 DPSO算法流程 本文采用SABER/Matlab协同仿真,在SABER中搭建物理模型,作为主仿真器,在Matlab中搭建算法和控制模型,通过SaberCosim模块交换数据。Saber中采用现成的光伏电池模块双二极管模型KC175GHT-2系列,参数为Pmax=175 W,Vmpp=23.6 V,Impp=7.42 A,Voc=29.2 V,Isc=8.09 A,αI=-1.09×10-1V/℃,αV=3.18×10-3A/℃。 Matlab中使用S-function builder建立基于C语言的复合算法MPPT控制器,3块PV电池串联连接,每个PV串并联旁路二级管,储能电容和防逆流二极管串联。Saber首先用数据转换单元采集Vpv和Ipv,然后通过SaberCosim模块交换数据,经MPPT控制器、PI控制器得到比较信号。 最后再通过SaberCosim和比较器得到开关管导通信号。为比较改进算法DPSO、传统算法PSO和P&O的MPPT性能,将系统在静态和动态两种情况下进行仿真,静态环境分为3个阴影模式:PSC-1的3块PV电池的光照强度均为1 kW/m2, PSC-2的3块PV电池的光照强度分别为0.6、0.8、1 kW/m2,PSC-3的3块PV电池的光照强度分别为0.4、0.7、1 kW/m2,详细信息如表3所示。 表3 静态环境下的不同阴影模式 动态环境分为3种情况:多峰到单峰3个PV串在2 s时由PSC-3模式突变为PSC-1模式,单峰到多峰的3个PV串在2 s时由PSC-1模式突变为PSC-2模式,最后一种3个PV串在t=1 s时由PSC-1突变为PSC-2,在t=2 s由PSC-2突变为PSC-3。详细信息如表4所示。 表4 动态环境下的不同阴影模式 图3利用saber中的测量模块给出了不同PSC阴影模式下的最大功率点的数值,从图中可以看出:最大功率点的位置在不同的阴影模式下分布在P-U曲线的不同位置。 图3 三峰值3种阴影模式下的光伏阵列P-U曲线 图4(a)给出了在PSC-2阴影模式下3种方法的功率跟踪仿真图,从图中可以看出:传统的P&O法在多峰值条件下失去了跟踪能力,陷入局部极值,而传统的PSO需要0.79 s,输出功率为337.08 W,改进的PSO需要0.41 s,输出功率为337.14 W,节省了27%的时间。理论的输出功率为337.15 W。图4(b)给出了在PSC-3阴影模式下3种方法的功率跟踪仿真图。从图中可以看出:传统的P&O法在多峰值条件下失去了跟踪能力,陷入局部极值,而传统的PSO需要0.78 s,输出功率为249.53 W,改进的PSO需要0.56 s,输出功率为249.81 W,节省了28%的时间,而理论的输出功率为249.87 W。 图4 不同阴影模式下3种方法的对比 从上述的仿真对比图可以看出:改进的PSO比传统的PSO跟踪速度提升了20%以上,且跟踪精度也有所提高,光伏阵列输出功率几乎没有震荡。从图4(a)可以看出,功率震荡不超过5 W。传统的扰动观察法不具备PSC条件下的全局寻优能力。 图5为3个PV串组成的光伏阵列,每个PV串为800 kW/m2,在2 s时变为1 000 kW/m2。从图中可以看出:在第1个峰值,改进的PSO比传统的PSO快0.37 s;在第2个峰值,改进的PSO比传统的PSO快0.23 s,跟踪精度也有所改善。 图5 多峰到单峰的动态跟踪能力对比 图6为光伏阵列在0~1 s工作在PSC-1阴影模式,在2 s时3个PV串变为PSC-2阴影模式。从图中可以看出:在第1个峰值,改进的PSO比传统的PSO快0.3 s;在第2个峰值,改进的PSO比传统的PSO快0.35 s,跟踪精度也有所改善。 图6 单峰到多峰的动态跟踪能力对比 图7为3 s内3种光照强度的动态跟踪情况对比,0~1 s光伏阵列在PSC-1阴影模式下运行,1~2 s光伏阵列在PSC-2阴影模式下运行,2~3 s光伏阵列在PSC-3阴影模式下运行。从图中可以看出:在第1个峰值,改进的PSO比传统的PSO快0.24 s;在第2个峰值,改进的PSO比传统的PSO快0.37 s;在第3个峰值,改进的PSO比传统的PSO快0.25 s,跟踪精度也有所改善。 图7 3种阴影模式下的两种方法的动态跟踪能力对比 从上述仿真对比可以看出:本文提出的改进DPSO算法无论在光照强度突变时或峰值数量突变时,都能在1 s内快速跟踪到最大功率点,相比传统的PSO算法,跟踪能力加快,阵列输出功率的误差不超过2%,具有良好的动稳态跟踪性能,满足设计需求。 本文提出了一种改进的DPSO算法,并在PSC下对光伏阵列的GMPP跟踪能力进行了验证。提出的DPSO算法采用改进的粒子更新速度方程,其中权重因子自适应地变化,以实现快速收敛,避免在GPP处振荡。该算法还通过从速度方程中去除随机数来消除固有的随机性。除此之外,粒子速度受某个上限的限制,其值基于PV串的开路电压。与传统的PSO算法相比,仿真验证了所提方案的优越性。这些结果表明:所提的基于DPSO的GMPPT技术性能优于传统的PSO算法。DPSO可以跟踪GP的任何阴影模式,具有更快的收敛性,并且在搜索期间PV阵列输出功率的变化更小,从而确保更高的跟踪效率。该算法还能检测PSC中的变化并跟踪变化的GMPP。除此之外,对于任何阴影条件,DPSO方法的GMPPT效率均超过98%。2 DPSO算法的程序流程和环境重启判断

3 DPSO算法的仿真对比
3.1 静态PSC环境下MPPT的仿真验证
3.2 动态PSC环境下MPPT的仿真验证
4 结论
猜你喜欢
少先队活动(2022年9期)2022-11-23
昆明医科大学学报(2022年1期)2022-02-28
文苑(2020年11期)2020-11-19
新疆大学学报(自然科学版)(中英文)(2020年2期)2020-07-25
中国诗歌(2019年6期)2019-11-15
浙江工业大学学报(2017年5期)2018-01-22
中学生数理化·八年级物理人教版(2017年11期)2017-04-18
数学大王·中高年级(2016年4期)2016-05-14
通信电源技术(2016年6期)2016-04-20