
考虑修正等效啮合尺寸的行星齿轮箱振动特性分析
2019-08-27 07:32王箫剑李鸿光
噪声与振动控制 2019年4期
王箫剑,李鸿光
(上海交通大学 机械系统与振动国家重点实验室,上海 200240)
行星齿轮箱是由太阳轮、行星轮、大齿圈以及行星架等元件组成的机构,具有降低转速比、放大电机扭转力等功能。因其传递平稳、承载力大、体积小巧等优点,被广泛应用于船舶、航天、汽车等领域中。然而此类行业对行星齿轮箱的安全平稳运行要求极高,所以进行行星齿轮箱振动特性研究是十分必要的。
在工程上,有很多商业软件可供分析齿轮箱动力学特性,它们通常利用以壳体与实体力学为基础的有限元分析方法进行分析。这些有限元模型虽然在建模方面能够保持较高的真实性,准确表现出物体之间的接触特性,但其通常需要较长的求解时间。
与此同时,对于集中参数模型[1-3,10]目前已有很多研究成果,但在工业上并未得到广泛的应用。集中参数模型是一种基于刚体齿轮质量-弹簧表示的模型,研究表明其与实验及有限元分析结果吻合较好[4-6]。其优点在于建立快速,需要的输入量相对较少,并且求解较为方便。其可利用类似多体动力学代码来评估不同工况的振动特性。
但其对等效啮合尺寸的讨论相对较少,故所得到的频谱图很难完全反映行星齿轮箱振动的全部频率成分,且忽视了倍频成分可能对啮频带来的影响。
本文通过随动坐标系与静止坐标系间的转换,结合提出的等效啮合尺寸模型对行星齿轮箱进行了集中参数建模。采用龙格库塔法对建立的模型进行数值求解,同时与实验数据进行对比,表明该方法可以较为准确地识别行星齿轮箱振动频率,模拟行星齿轮箱振动特征。
1 行星齿轮箱集中参数建模
通常的齿轮箱模型[7,9]如图1所示,其传动系统由4部分构成,分别为太阳轮,行星轮,内齿圈与行星架。而齿轮箱则由于输出构件的不同分为星型齿轮箱及行星齿轮箱。本文研究的行星齿轮箱内齿圈固定,通过各齿轮间啮合关系,将从太阳轮输入的功率通过行星轮带动行星架的运动,传递给风扇进行输出。

图1 齿轮箱集中参数模型
集中参数建模[2]中采用质量代替6个部件:1个太阳轮,1个大齿圈,1个行星架与3个行星轮。简化太阳轮-行星轮、行星轮-外齿圈的接触特性为以啮频为变化频率的正弦形式的刚度。
1.1 部件接触状态建模
对于部件接触状态分为3个系统进行分析,分别为太阳轮-行星轮系统、行星轮-外齿圈系统、行星轮-行星架系统。
(1)太阳轮-行星轮系统
将太阳轮-行星轮的啮合系统看成双质量块单弹簧连接系统,共有6个状态变量,分别为太阳轮x向平动xs、太阳轮y向平动ys、太阳轮转动θzs、轮x向平动xpi、行星轮y向平动ypi、行星轮转动θzpi。太阳轮、行星轮的运动分别用如下两式描述。
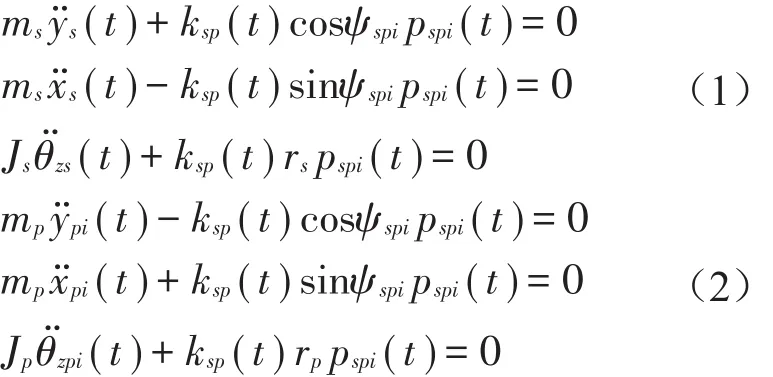
式中:ψspi=φsp-αpi为啮合线倾角,即法面压力角αpi与行星轮相对位置角φsp之差。而

其为等效啮合尺寸。
(2)外齿圈-行星轮
将外齿圈-行星轮的啮合系统看成双质量块单弹簧连接系统,共有6个状态变量,分别为外齿圈x向平动xr、外齿圈y向平动yr、齿圈转动θzr、星轮x向平动xpi、行星轮y向平动ypi、轮转动θzpi。外齿圈、行星轮的运动分别用如下两式表示。

式中:ψrpi=φrp+αpi为啮合线倾角,即法面压力角αpi与行星轮相对位置角φrp之和。而

其为啮合尺寸。
(3)行星架-行星轮

而行星轮与行星架的运动方程为

以上3组矩阵式叠加,即为各状态变量随啮合刚度变化的动力学方程。此时,式中共有6个构件(1个行星架、1个太阳轮、1个内齿圈、3个行星轮),每个构件有3个状态变量,故共存在18个状态变量。
构建内部相互作用导致的动力学方程如下式所示

式中:M为质量矩阵;Km为啮合刚度矩阵;q为状态变量列向量。
1.2 部件支承状态建模
由于行星轮因安装在行星架上,不与地面直接接触,其支承刚度由行星轮-行星架的相互作用刚度代替。故仅需考虑太阳轮,大齿圈与行星架的支承刚度,如下3组式所示:
太阳轮质量-支承刚度系统
二是高度重视阅读与写作。美国高中生的阅读量远远大于中国学生,又厚又大的课本,要在课前阅读,并写出阅读笔记和提出问题;教师还会发阅读资料及学习任务单;每个单元结束时都有综合写作,不论人文课还是科学课,学生们常常一写就是一篇论文。

大齿圈质量-支承刚度系统

行星架质量-支承刚度系统

以上3组矩阵式子叠加,即为各状态变量随支承刚度变化的动力学方程。此时,式中共有3个构件(1个行星架,1个太阳轮,1个内齿圈),每个构件3个状态变量,故共存在9个状态变量。
支承刚度作用的动力学方程如下式所示

式中:M为质量矩阵;Kb为支承刚度矩阵;q为状态变量列向量。
1.3 随动坐标系旋转建模
随动坐标系与静止坐标系间的坐标变换一般为

故随动坐标系下速度在静止坐标系中可表示为

而加速度在静止坐标系中可表示为

1.4 系统总体方程分析
结合式(10)、式(14),人字齿行星齿轮传动系统动力学方程的矩阵形式如下

q为随动坐标系下状态变量,这里存在18个状态变量,分别为6个工作构件(1个太阳轮、1个外齿圈、1个行星架、3个行星轮)的x向位移、y向位移与旋转转角。
之后,将式(15)、式(17)代入式(18)中,将随动坐标系系统运动方程转化到静止坐标系下。并考虑外加扭矩的影响,所得方程如下

Q为静止坐标系下状态变量。
1.5 等效啮合尺寸与等效啮合刚度建模
对于啮合尺寸,本文忽略齿廓误差,而仅讨论型心制造误差所带来的影响。由于在不对中的情况下,将外激励看为转子的不平衡激励。
太阳轮型心以转频为频率周期运动,故其坐标可以表示为

式中,XX、YY为太阳轮型心坐标,X、Y为太阳轮旋转中心坐标,ω为太阳轮转动角速度,γ为初始误差相位角,e为初始误差值。
将式(20)代入式(19)中,可得到系统新的状态方程为

其中,啮合刚度矩阵中时变变量为时变啮合刚度[8],将其规定为

而等效啮合尺寸可以由式(6)、式(20)推导得到。

考虑到其他倍频成分激励,类比式(22),此处采用ω、2ω、3ω等来代替单个的ω分量,即可将等效啮合尺寸修正为

由式(10)、式(23)推得,因等效啮合尺寸变化而导致的内啮合激励力F(t)为

式中:NN1(ωct)与NN2(ωct)可由式(18)、式(19)推导得到。
从式(25)中可以看出,系统外界激励包括转频、倍频、啮频以及啮频对应的边频带成分。而整个系统为刚度含时间项的非线性振动问题。
2 数值求解
由上述分析可知,系统的动力学方程为包含18个状态变量的2阶非线性微分方程组,对于此2阶微分方程组,求解析解乃至解耦均较为困难。故采用龙格库塔法(显式高精度单步算法)对此微分方程组进行数值求解。
将新的动力学方程简化表示为

式中:q(t)为新的状态变量,即

H为传递矩阵,即

式中:K′b、K′m、M′分别为经过旋转变换得到的支承刚度矩阵,啮合刚度矩阵与质量矩阵。而G与Kω为旋转变换引入的陀螺矩阵与向心刚度矩阵。
而Y为外界激励,即为系统输入

根据龙格库塔方法,此初值问题表示如下

当龙格库塔法的时间间隔满足奈奎斯特采样定理时,即可得到系统在外激励下的响应曲线。
选取进行仿真分析的数据如表1所示。
经过上述数值积分,得到太阳轮、外齿圈、行星架与行星轮的振动速度图像与位移图像如图2所示。
3 对比实验
实验的振动数据采集自行星齿轮箱故障模拟试验台。如图3所示,试验台包括驱动电机、交流电机、行星齿轮箱、固定轴齿轮箱和制动器。采用转速传感器和加速度传感器分别采集电机轴转速和行星齿轮箱振动信号,电机轴转速可由驱动电机自由调节,本实验中电机为恒定转速,转速为2100 r/min。
由于太阳轮制造误差值无法测量,所以在信号的频谱图参考基频处幅值做归一化处理,所得实验信号频谱与理论信号频谱比较如图4所示。
如图4所示,本文方法能够清楚地展示出齿轮箱振动的1、2、3、4倍频、各阶啮频及其边频带。从实验结果可以看出,本方法能够便捷找到系统的各特征频率,且各频率幅值与真实情况较为接近。

表1 太阳轮不对中行星齿轮箱仿真模型参数
4 结语
本文提出了行星齿轮等效啮合尺寸的表示方法,并基于其与随动坐标变换建立了一种行星齿轮箱动力学模型。对其进行数值求解,并与实验结果进行比较,表明了该模型能够较为准确预测行星齿轮箱在太阳轮制造不对中时的振动特征频率,该模型预测结果较为准确,相比一般的有限元模型计算耗时短。该模型可用于行星齿轮箱的动力学分析与故障诊断。

图2 动力学模型数值分析结果

图3 行星齿轮箱实验布置

图4 齿轮箱外齿圈振动信号计算结果与实验结果对比
猜你喜欢
山东冶金(2022年3期)2022-07-19
数字技术与应用(2021年2期)2021-04-22
湖南大学学报·自然科学版(2021年1期)2021-02-21
百科探秘·航空航天(2020年6期)2020-07-09
智能计算机与应用(2020年10期)2020-03-18
中学生数理化·八年级物理人教版(2019年5期)2019-06-25
读者(2018年20期)2018-09-27
制造技术与机床(2017年4期)2017-06-22
导弹与航天运载技术(2016年2期)2016-10-14
少儿科学周刊·儿童版(2016年1期)2016-03-14
