
基于单片机与改进PID的智能电液伺服控制系统研究
2019-09-09 05:33邬志军
井冈山大学学报(自然科学版) 2019年4期
刘 程,邬志军
(1.六安职业技术学院汽车与机电工程学院,安徽,六安,237000;2.皖西学院机械与车辆工程学院,安徽,六安,237000)
0 引言
当今工业的快速发展,为人们的生活带来了便利。液压系统可通过液压的作用,为铸造、汽车等技术领域提供帮助,液压系统已经被广泛应用于人们的生活中[1]。电液伺服系统是液压控制系统的一个重要分支,其起到传动的作用。电液伺服系统与其他位移伺服系统相比,具有高传动效率、易于安装以及使用寿命长等优点,因此在航空航天、国防军工以及重型机械制造等领域,都起到了重要的作用[2]。随着生活水平的不断提高,人们对电液伺服系统的控制速度以及准确度等都提出了更高的要求,因此,对提高电液伺服系统的控制速度以及控制准确度的研究就变得非常有意义。
当下,国内外出现了较多的电液伺服控制系统。Xue等人[3]通过对PLC技术进行研究,将其引入到电液伺服系统的控制中,利用PLC作为控制中心设计了电液伺服位置闭环控制系统。孙春亚等人[4]将基于欧姆龙 CP1H PLC用于电液伺服控制系统,通过光栅尺对位置变化进行监测,并引入模糊0控制器对位置进行调控。这种基于PLC控制的电液伺服控制系统能够对电液伺服器进行控制,但由于PLC较为昂贵,而且计算能力相对较弱,导致这种电液伺服控制系统的控制准确度较低,成本较高。Ding等人[5]提出了一种非线性的电液伺服控制方法,将复杂的电液机械系统分为两个子系统:非柔性非线性系统和线性系统。针对非柔性非线性子系统,设计了AIMC控制器,实现了速度轨迹跟踪控制,并针对线性子系统推导了位置反馈控制。杨四阳等人[6]根据参数不确定性、非线性等因素导致的电液位置伺服系统跟踪控制问题,设计了一种鲁棒自适应反步方法,通过建立自适应律来抑制由于参数不确定性对系统跟踪控制性能的影响,通过建立鲁棒控制律使得系统具有全局一致渐近稳定性能。虽然以上方法降低了电液伺服控制系统的硬件成本,但由于算法的复杂性,使得控制系统的控制效率较低。
本文将 MSP引入到电液伺服控制系统中,将其作为主控器,对电液伺服系统的位移量进行监控,并通过神经网络算法对PID控制器的微分、积分以及比例系数进行调节,形成改进的PID控制器,用于对电液伺服控制系统进行策略控制。通过MSP单片机构造硬件部分,联合神经网络改进的PID作为控制策略,从而设计了具有智能化、快速化、准确化的电液伺服控制系统。实验结果表明,所设计系统能够快速、准确地对电液伺服系统进行控制。从电液伺服系统的位移控制曲线可见,所提方法控制的曲线波动较小,更具稳定性。
1 系统模型分析
电液伺服控制系统的工作框图如图1所示[7]。从图1可见,该系统是一个具有反馈量的系统,其通过位移传感器采集实时位移量作为反馈信号,将其送入控制器中,控制器将反馈信号与输入信号进行比较,根据比较结果对电液伺服阀进行控制,实现液压的控制。
依据液压控制理论,整个控制系统中电液伺服阀的数学模型为[8]:

其中,Hv为伺服阀的空载增益,wv为伺服阀的自然频率,ζv为伺服阀的阻尼系数。
液压缸的数学模型为:

其中,HQ为液压缸的流量增益,AQ为液压缸作用面积,HD为液压缸的流量压力系数,ml为外部负载的质量。
位移传感器的数学模型可视为一个比例环节,其表述为:

其中,Hf为位移传感器增益。

图1 电液伺服控制系统工作过程Fig.1 Working process of electro-hydraulic servo control system
2 控制系统硬件设计
所提电液伺服控制系统以 MSP单片机为主控器,配以位移传感器、人机交互单元等外围电路,组成了控制系统的硬件部分。硬件部分设计框图如图2所示。从图2可见,硬件部分的主控器采用的是MSP430F5529单片机,该单片机具有轻功耗、高精度、计算速度快等特点,其内部具有1个高性能12位模数转换器,可用于对接收到的位移信号进行处理。人机交互单元采用荣歌RG-XSQ008型LCD触控显示屏以及矩阵键盘和报警电路组成,荣歌RG-XSQ008触控显示屏具有显示角度广、灵敏度高等特点。位移量监测单元采用米朗MPS-XS位移传感器以及信号调理电路组成,米朗MPS-XS位移传感器具有高精度、抗干扰能力强等特点,信号调理电路的作用是将位移传感器监测到的位移信号进行滤波与放大,再送入主控器进行处理。执行单元采用伺服放大器与电液伺服阀组成,其中伺服放大器的作用为将主控器发出的控制信号进行放大,以驱动电液伺服阀工作。
整个硬件单元的工作时,首先需要通过LCD触控显示屏将标定压力控制参数输入到主控器中,然后主控器再将接收到的位移监测量与标定量送入控制策略进行计算,最后根据计算结果送出电液伺服阀的调节信号,从而对液压进行调整。

图2 电液伺服控制系统硬件框架Fig.2 Hardware framework of electro-hydraulic servo control system
3 控制系统控制策略设计
控制策略是电液伺服控制系统软件部分的核心。控制策略的优劣关系到整个系统的控制准确度以及控制效率。PID控制器是一种工业控制常见的控制策略,其原理较为简单,易于实现。PID控制器的表达式为[9]:

其中,KP、KD、KI分别为比例、微分以及积分系数。
虽然 PID控制器在设定好KP、KD、KI三个系数后具有良好的控制效果,但PID控制器对KP、KD、KI的依赖性较高,而且KP、KD、KI的准确设定需要较复杂的调试过程与较丰富的调试经验。因此,PID控制器的适应性不强,而且稳定性能不佳。神经网络算法具有较强的自适应能力,能够通过学习对KP、KD、KI进行自适应调整。故在此引入神经网络算法,对PID控制器进行改进,并将改进的PID控制器作为所设计电液伺服控制系统的控制策略。
如图3所示,神经网络具有多输入、多隐层及单输出的结构,其单输出表达式为[10]:

利用(5)式求取神经网络的指标函数:

令神经网络的学习效率为θ,则通过神经网络对KP、KD、KI进行自适应调整的过程为[11]:
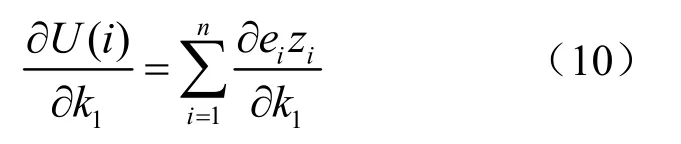

图3 神经网络的结构Fig.3 Structure of neural network
4 仿真结果
利用Matlab/Simulink软件,在Intel I5处理器、4GB内存的计算机上进行仿真实验。实验中选取文献[12]与文献[13]中电液伺服控制方法作为对比。实验采用目标跟踪方法,先设定好标定位移曲线,再利用不同方法对标定曲线进行跟踪,通过跟踪结果对不同方法的控制性能进行分析。
不同方法的跟踪结果如图4和图5所示。从图4中可见,三种方法都能够对标定位移曲线进行跟踪。将三种方法的控制位移曲线进行对比可见,本文方法的控制位移曲线较对比方法的控制位移曲线波动更小,而且产生超调量时,本文方法能够更为快速地对超调量进行控制,迅速回归跟踪标定位移曲线。文献[12]方法所得的控制位移曲线波动较为频繁,而且波动幅度较大,对超调量的控制时间较长,而且准确度较低。文献[13]方法所得的控制位移曲线波动较文献[12]方法所得控制位移曲线较小,但其控制位移曲线与标定位移曲线的拟合误差较大。本文方法所得控制位移曲线较文献[12]和文献[13]方法的控制位移曲线波动最小,而且超调幅度也最小,与标定位移曲线的拟合度最高。从图5可见,三种方法的控制位移曲线较标定位移曲线都有所偏差,但通过对比可见,本文方法的控制位移曲线比对照方法的控制位移曲线更贴合于标定位移曲线,当发生波动时,本文方法能够更快的调节控制位移曲线趋于标定位移曲线。由此说明,所提方法对液压伺服系统进行控制时,具有较高的控制准确度与控制效率,而且控制过程较为平稳,能够较好的控制液压伺服系统。

图4 不同方法的跟踪结果Fig.4 Tracking results of different methods

图5 不同方法的跟踪结果Fig.5 Tracking results of different methods
5 结语
本文利用MSP430F5529单片机作为主控器,设计了一种智能化的电液伺服控制系统。该系统在MSP430F5529单片机的基础上,采用荣歌RG-XSQ008型LCD触控显示屏作为人机交互核心部件,利用米朗MPS-XS位移传感器对电液伺服系统的位移量进行实时监测,构建了所提系统的硬件部分。引入神经网络算法对PID控制器的比例、微分以及积分系数进行整定,形成改进的PID控制器,并将其作为所提系统的控制策略,以计算标定位移量与实时监测位移量的偏差,指导主控器对电液伺服阀进行控制,从而实现电液伺服系统的控制。通过仿真实验结果可见,所提方法对电液伺服系统的位移控制精度与控制效率都较高,控制过程较为平稳,可为电液伺服控制系统的进一步研究提供参考。
猜你喜欢
北京航空航天大学学报(2022年6期)2022-07-02
化工管理(2021年7期)2021-05-13
装备制造技术(2020年3期)2020-12-25
汽车维修与保养(2020年11期)2020-06-09
智富时代(2019年2期)2019-04-18
智富时代(2019年2期)2019-04-18
制造技术与机床(2017年3期)2017-06-23
中国惯性技术学报(2017年1期)2017-06-09
专用汽车(2016年4期)2016-03-01
北京航空航天大学学报(2016年4期)2016-02-27
