南京ADS-B数据站功能及接入自动化系统的分析
2019-09-09 08:51宫利苹
中国科技纵横 2019年13期
宫利苹
摘 要:南京ADS-B数据站系统共引接了十个ADS-B地面站信号,是连接地面站和数据用户之间的桥梁,为所辖地区的中低空管制中心、进近、塔台等空管部门提供ADS-B实时综合监视信息,同时实现对本区域内ADS-B地面站的监控。本文阐述了ADS-B数据站的架构及功能,并针对ADS-B数据和雷达数据的差异性,分析了ADS-B数据接入自动化系统后,在数据融合上的难点和潜在风险。
关键词:ADS-B数据站;系统架构;数据处理;自动化系统
中图分类号:TP277 文献标识码:A 文章编号:1671-2064(2019)13-0041-02
0 引言
广播式自动相关监视(ADS-B)技术属于非独立协同式监视,与传统的雷达监视相比,它可以提供更多的监视目标信息,定位精度高,数据更新率快,建设、运行维护成本低。
ADS-B技术从整体上可分为数据源、传输链路和信号接收处理三大部分。现阶段ADS-B地面接收处理部分包括ADS-B地面站和数据处理中心。ADS-B地面站输出的数据更新频率快,数据量大,如果直接将多个地面站输出的多路ADS-B数据接入本地空管自动化系统,将大大增加空管自动化系统处理的负载,风险很大。因此,需要建设ADS-B数据处理中心,它具有融合输出、提供防伪和抗干扰能力。在设计时采用层级传输的原则,将全国ADS-B传输网络分为三个层级:一级数据中心(主备)、二级数据处理中心(高空管制单位)和数据站(空管分局站)。
南京ADS-B数据站共引接了十个ADS-B地面站,并在2018年底完成ADS-B实时综合监视数据接入到自动化系统中。
1 ADS-B数据站系统架构
ADS-B数据站从结构上可以分为三个部分:数据引接、数据处理和数据输出。
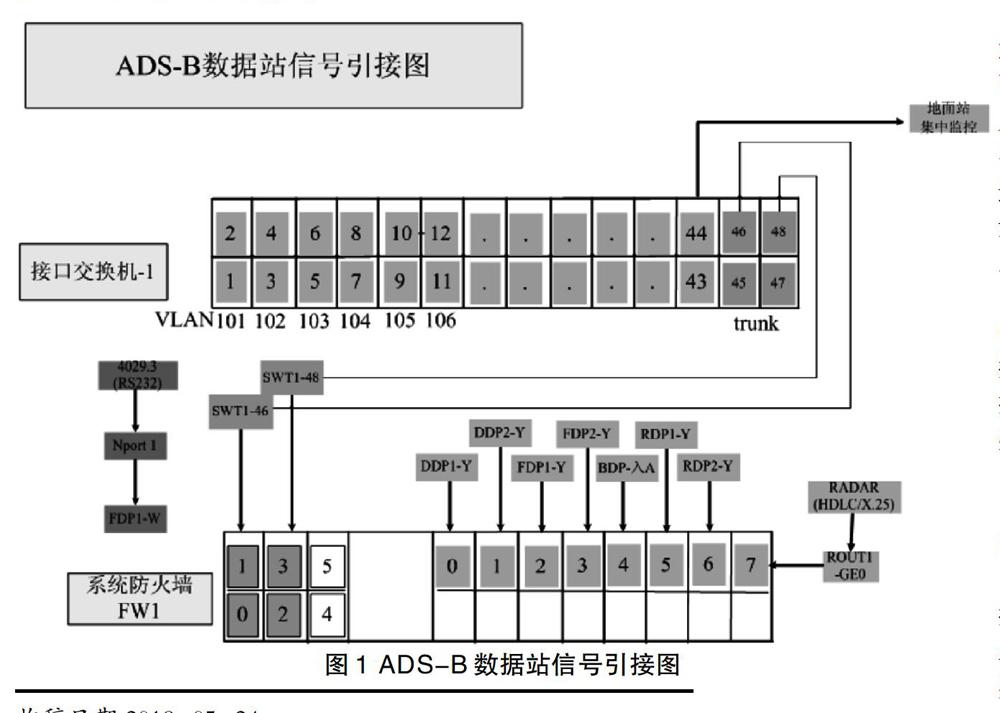
数据引接是指接入多个ADS-B地面站,如南京ADS-B数据站,共引接了10个ADS-B地面站。各地面站经过两路不同的传输链路分别接入输入交换机A和输入交换机B。为了避免各地面站ADS-B数据相互串扰,在输入交换机上设置了VLAN,保证各地面站信号的隔离。同时在输入交换机后增加防火墙,保证网路安全。信号引接如图1所示。
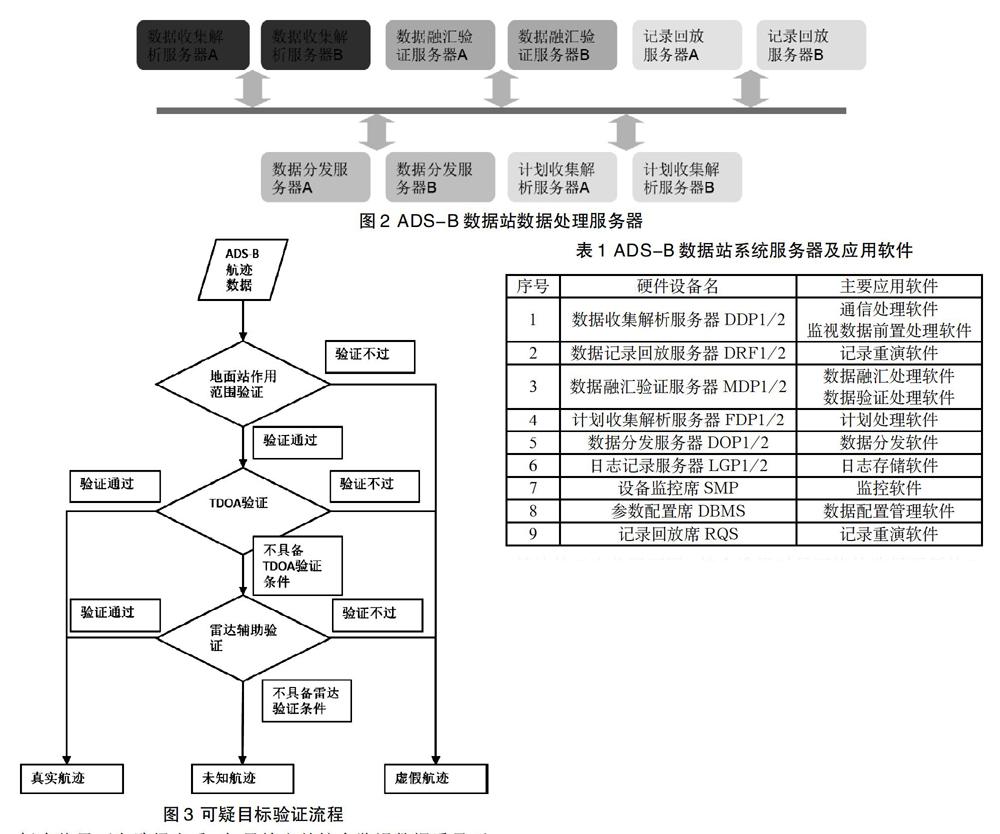
数据处理部分是整个数据站的核心,采用了三網络 (A/B/C网)冗余结构,服务器均采用双机热备份方式工作,保证系统运行安全、可靠。数据处理部分的服务器如图2所示。
数据输出可以根据不同用户的需求,定制输出不同参数的ADS-B数据。南京ADS-B数据站输出的融合数据经过输出防火墙和交换机后送给了本地自动化系统和华东二级数据处理中心。
2 ADS-B数据站主要功能
ADS-B数据站引接多个地面站的实时目标监视数据,通过目标相关判断后,将同一目标的多路数据融合形成实时综合监视信息,为管制中心、进近、塔台等空管部门提供使用,同时对本区域内ADS-B地面站进行监视。
系统各服务器的主要功能如表1所示。
2.1 引接监视数据
系统能同时接收处理多个地面站发送过来的ADS-B数据,每个地面站可通过两路不同的传输链路接入到输入交换机A和B中。主通道参与多路ADS-B数据融合处理,备通道不参与多路融合,只做必要的质量监视。系统可以自动或人工切换主备通道,不影响数据的正常处理。
系统除了引接需要的ASTERIX CAT021类目标数据、023类格式数据和247类版本数据外,还可以引接雷达数据或综合航迹数据,在可疑目标验证处理中使用。
2.2 监视数据处理
2.2.1 单路ADS-B目标数据的解析和处理
系统除了对多路ADS-B目标数据进行融合处理外,还会对单路的ADS-B目标数据进行解析和跟踪处理。单路处理后的数据可以在目标态势界面上选择查看,如果输出的综合监视数据质量不好,可以通过检查单路数据来判断故障点,方便技术维护人员排查故障原因。
2.2.2 多路ADS-B目标数据的融合
对于多路允许参与融合的ADS-B目标信息,系统经过目标相关判别后,确定这些目标信息是否属于同一个目标,如属同一目标则进行融合处理,生成系统综合目标信息。与单路目标类似,用户也可在态势界面上选择观察综合目标情况。融合处理后的ADS-B目标应尽量不出现位置回跳、二次代码/航班号来回切换的情况。
系统对接收到的多路ADS-B目标数据,优先在高版本地面站中选择距离目标最近的站点作为优选站点。如果没有高版本的基站数据,或者说只有0.26版本的数据,则选择离目标最近的站点作为优选站点,除航班号、二次代码、高度、速度、航向等信息外,其他信息使用优选站点的数据。
优选站点中可能并不包含航班号、二次代码、高度、速度和航向信息,或者即使包含了该信息,但也可能是被保持的历史数据。这几种类型的数据由收到的所有基站信息融合而成。当某一个基站中包含该信息时,则综合航迹包含该信息。当不同基站含有的同类信息不同时,如某些基站收到了更新的二次代码,但有些基站未收到,使得不同基站的二次代码不同,综合选择时尽可能的选择更新的二次代码作为综合数据。
2.2.3 旁路ADS-B数据处理
在系统数据处理中,设置了旁路数据处理流程。目的是当数据站出现系统性故障不能使用时,可以通过旁路输出ADS-B信号提供给用户使用。旁路处理配置了单独的处理服务器,不经过运行子网,直接将输入的ADS-B地面站数据与输出相连。
2.3 数据质量控制
2.3.1 异常数据处理
系统对每个数据通道都进行实时监视,当某个通道数据流量过大,超过门限值时,系统将自动关闭此通道并在监控终端进行提示,在流量正常时自动打开此通道恢复处理。
对于同时处理的单路目标和综合目标的个数,系统设置有最大门限值,超过门限值即发生溢出时,系统将在监控终端提示的同时进行新目标丢弃过滤等过载处理,保证系统正常运行。
对于格式错误、长度超长或过短、实际长度和声明不符、SAC和SIC码与设置的参数不符、时标检验不通过、缺少必传数据项等异常数据帧,系统会直接丢弃,不会进入后续处理流程。
2.3.2 可疑目标验证
系统能够通过基站有效范围、TDOA验证和雷达验证来甄别可疑的ADS-B目标报告。被判定为可疑的目标在态势界面上予以醒目的提示,并说明判定依据。在向系统外输出数据时,可人工指定被系统判定为可疑目标的数据是否输出。
这三种验证方式在对最终目标是否可疑的结论上具有不同的优先级。覆盖符合性验证具有最高的优先级,TDOA时标定位验证其次,覆盖交叉验证最低。驗证流程如图3所示。
2.3.3 数据帧实时分析
系统能够同时对所有通道发送过来的数据帧进行各种指标的实时统计,用户可随时选择查看任意某通道数据的某项统计结果,并可对本通道历史情况进行纵向对比,或是对多个通道之间进行横向对比。
2.4 定制数据输出
系统可以根据不同用户的特定需求,输出指定参数的ADS-B数据。输出的数据可以是融合后的综合航迹,也可以是单路处理后的航迹数据。其他参数如:数据格式、更新周期、延迟时间、指定航空公司、输出的空域和高度限制都可以根据需求进行设置。
3 ADS-B数据接入自动化系统的分析
ADS-B数据在应用上的主要优势有三点:一是更新频率快;二是位置高度等各项目标态势信息的数值最小粒度比较小;三是可提供给自动化系统的信息远多于A模式代码和C模式高度的普通二次雷达。然而,如果自动化系统没有做适应性处理,上述这些优点反而可能会带来各种问题。
在ADS-B数据与雷达数据融合处理时,不能简单地将ADS-B数据视为一路数据格式特异、更新较快的雷达数据来进行处理,要考虑ADS-B数据与普通雷达数据之间的差异性特点。
ADS-B数据更新频率与雷达数据更新频率不同,考虑到人的反应速度和空管业务实际情况,自动化的综合航迹采用原来的固定4秒更新周期。但是在数据融合时要考虑ADS-B更新快,位置、高度等方面的更新相对于雷达更及时,一般也是更准确,但是这些优点处理不当时也会对目标的融合关联有负面影响。由于ADS-B更新较快、每次更新的数据变化不会很大,雷达目标位置误差相对较大又较难抵消,因此时空对准处理必须非常精细,这是个很难调节平衡的过程。
另外,ADS-B的目标位置是用经纬度表示的,其数值的最小粒度最小可达10的负7次方这个量级。在目标高度上,最小粒度真正达到了格式规范要求的25英尺(非S模式雷达的C模式高度受限于采样和编码方式,能做到的最小粒度为100英尺)。从这两方面来说,ADS-B数据相对于雷达数据具有天然的优越性,然而数值的最小粒度较小并不代表数据一定精确,实际应用中还是有一些问题需要解决。这些都需要自动化系统在数据融合时做相应考虑和处理。
南京ADS-B数据接入自动化系统后,还需要根据实际运行情况来进一步验证和改进。
4 结语
新监视技术应用需经过运行试验与验证,在东部航线地区,现阶段仍然以空管二次监视雷达作为主用监视手段,广播式自动相关监视作为空中交通服务的补充监视手段。随着飞行流量的持续增加,为了提升空域监视管理的整体水平,保障空域安全,新监视技术将发挥更加重要的作用。
参考文献
[1] 余阗.浅析乌鲁木齐空管中心ADS-B接入自动化系统优化与研究[J].科技创新与应用,2017(31):193-194.
[2] 胡洋.ADS-B数据处理中心的设计与实现[J].网络与信息工程,2018(04):80-82+89.
猜你喜欢