
智能化图书管理的设计
2019-09-09 13:33王伟兴李港李小林
数码世界 2019年6期
王伟兴 李港 李小林

摘要:智能化时代的来临,机器人技术应用于越来越多的领域,但对于图书智能化管理仍处于初步发展阶段。本文简述国内外图书馆智能机器人应用现状的同时,提出了一种智能化,全面化的图书馆馆藏管理设计方案。利用智能分拣系统和搬运机器人两大模块系统的解决了图书馆员低效率高强度的工作问题,并且更新了传统模式下的图书馆书籍管理和服务模式,以促进国内图书馆机器人的发展。
关键词:搬运机器人图书分拣智能图书管理
1背景
随着当今科学技术的急速发展,人工智能及计算机技术对机器人技术的发展提供了强有力的支撑。目前,智能机器人的发展有很大的应用前景。其中各类大型图书馆的图书管理工作存在单调性、重复性等问题。机器人是一种节约人力的自动化设备。可以代替目前图书馆工作人员低效率高强度的图书管理工作。1994年世界上第一个机器人为图书馆服务的机器人诞生,打开了图书馆应用机器人的篇章。而国内关于图书馆机器人的应用仍处于理论研究阶段,因此,图书馆搬运机器人在国内必将有有很大应用前景。
2国内外现状分析
在国外,图书搬运机器人在德国柏林大学图书馆、德国洪堡大学图书馆和日本大阪市立大学得到了成功应用。图书自动存取机器人能够实现自主导航和定位,完成图书上下架等操作,具有代表性的研究是美国约翰霍普金斯大学SuthakornJ等研制的面向异地图书存取的机器人系统(CAPM)原型,新加坡国立大学、西班牙卡斯捷罗大学也进行了相关研究。
而在国内,涉及人工智能、图书准确定位与抓取、多机器人协作等的机器人技术要真正应用到开放性的图书馆环境还面临很多挑战。比如清华大学图书馆的聊天机器人,厦门市图书馆的分拣系统。
3总体设计方案
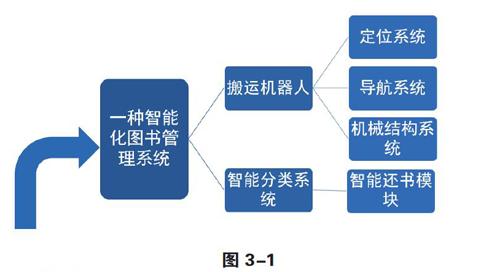
一种智能化图书管理系统包括搬运机器人和智能分类系统两个部分,其一可以在图书馆还书位置设置一个智能书柜,该书柜可采用目前最方便及通用的条形码识别技术将所还书籍进行分类整理。该书柜为整个系统控制中枢,其内可输入整个管藏的书籍信息,控制机器人搬运。其二,图书搬运机器人根据信号判断取书筐位置和需运送到哪个书架的某一层,然后图书搬运机器人通过引导技术运行到指定位置取走书筐,将书筐运送到指定书架并通过图书搬运机器人搬运机构将书筐放置在指定站点,完成后回到初始位置待命。搬运机器人包含了定位系统,导航系统和机械结构系统。
4工作原理及组成
4.1智能还书模块
4.1.1识别模块:条形码是把线条与空白按照一定的编码规则组合起来的符号,用以代表一定的数字、字母等资料。在进行辨识的时候,用条码识别机(条码扫描器又叫条码扫描枪或条码阅读器)扫描,得到一组反射光信号,此信号经光电转换后变為一组与线条、空白相对应的电子讯号,经解码后还原为相应的文字,数字,再传人电脑。条形码技术具有速度快、可靠性强、寿命长、成本低廉,采集信息量大,灵活实用等特点,因此本识别模块可利用国内应用最普遍的条形码技术进行图书识别,进而精准定位。
4.1.2分类模块:利用预先导人图书馆所有书籍的信息,包括图书尺寸及其对应位置,用于对图书进行分类整理。并且采用立式箱柜扫条形码弹出模式,类似超市私人物品存取柜根据书籍种类不同,弹出对应的收书柜,读者可将要归还的图书资料自行放入对应书柜。
4.1.3系统控制中心:作为图书搬运机器人总控端,需要完成图书分类模块的信息获取和搬运机器人的运行控制,确保系统控制中心与搬运机器人能够顺利传输无线信号,处理图书信息、分拣系统信息、图书定位信息等。图书分拣系统,可以对粘贴有条形码的归还图书进行识别并按类别进行分拣,实现全智能完成对图书回收、分拣、整理的工作。在预设程序控制下.搬运系统能够按照预先设定好的路径运行,将已经分拣完成的图书资料搬运至指定阅览室。最终完成借阅后图书的自动归还工作。
4.2定位导航系统
搬运机器人要解决的主要问题之一就是定位导航方面的问题。可以采用智能AGV,它指装有自动引导装置,能够通过预先设计好的路径自动将物品运输至指定书架,在车体上具有编程和车体选择装置,安全保护装置以及移载功能的搬运车辆。智能AGV采用全范围覆盖式障碍物测量,抗干扰能力强,此外还能避免温湿度,光线颜色等的影响,因此上大大的超越了传统搬运车的性能。此外,智能AGV系统还可接人ERP等其它系统,进而可以完成自主智能工作,这也为将来的系统和升级提供了可能。
智能AGV引导方式有电磁导航,光学导航,激光导航和惯性导航等。与其它方式导航相比,磁条导航具有引线隐蔽,不易污染和破损,导引原理简单而可靠的优点,便于控制和通讯,对声光无干扰,制造成本较低等优点,所以采用电磁感应式作为AGV的引导方式,也就是我们最常见的磁条导航。在制定路径上粘贴磁性胶带,由于AGV车底部装有电磁传感器,它会感应指定路径上的磁性胶带。从而完成自动行驶和搬运书籍到指定站点(定义相关站点主要根据磁条极性的不同排列组合设置)的工作。磁条引导的方式是常用也是成本最低的方式。
4.3机械结构系统
图书自动存取机器人主要采用多自由度关节型机械手,有助于增加机器人的柔顺性和灵巧性、但控制比较复杂。而采用直角坐标型的垂直升降装置是比较理想的方式。在移动过程中,垂直升降结构可以折叠,以降低机器人的重心,增加其运动的稳定性。类似AGV叉车式的移载小车,可以实现对分拣书筐的搬运。如图4-1所示
5可行性分析
(1)本系统分为两个模块:将图书智能分类系统和搬运机器人相结合,同时应用条形码识别技术,AGV和磁条导航技术等,从而具有成本低,应用普遍,可以更简易对现有图书馆安装改造的特点。在将技术难度降低的同时,提高了工作的全面性。
(2)传统图书馆书库存在着人工劳动效率低、人力成本高、分类准确率低等种种问题。本系统可以代替目前图书馆工作人员低效率高强度的图书管理工作,将图书管理工作更加条理化,智能化。有利于推动文化建设,提高社会效益。
(3)随着教育水平的提高,大型图书馆得到了充分发展,国内在这领域仍停留在理论研究阶段,尚未出现成熟完善的应用实例,所以从市场的需求方面来讲,智能图书管理系统具有很大的市场应用前景。
参考文献
[1]樊慧丽.国内外图书馆机器人的研究应用现状与思考,南京大学信息管理学院
[2]赵晋芳,一种图书搬运机器人的设计,沈阳工学院机械与运载学院
猜你喜欢
少年文艺·开心阅读作文(2021年8期)2021-09-05
时代英语·高二(2021年4期)2021-07-29
时代英语·高二(2021年4期)2021-07-29
数学大王·中高年级(2018年12期)2018-01-10
学苑创造·B版(2017年10期)2017-12-21
中学生数理化·高一版(2016年6期)2016-05-14
儿童故事画报·发现号趣味百科(2015年4期)2015-12-04
学生天地·初中(2014年1期)2014-02-17
