
RN1901型齿状切刀式偏心轮地瓜秧收割机的研究
2019-09-10 18:53李慧林伟孙策郭春瑶
今日农业 2019年6期
李慧 林伟 孙策 郭春瑶


摘要:针对目前市场缺少地瓜秧收割机的现象以及现有地瓜秧收割机结构复杂、生产成本高的问题,设计出一种小型齿状切刀式偏心轮地瓜秧收割机,该设计主要包括齿状切刀①、齿状切刀②、抓秧器和存储箱,结构简单,可使用普通农用拖拉机牵引工作,本身无需提供动力,生产成本较低,适用于目前普遍小规模种植地瓜的农村地区,能够较好地实现地瓜秧的高效收割。关键词:齿状切刀;偏心轮;抓秧器;地瓜秧收割机
中图分类号:S225
文献标识码:A
引言
地瓜是我国重要的粮食种类之一,也是重要的工业原料和新型能源用原料,是世界粮食生产的底线作物和极具竞争力的能源作物,亦是优质的抗癌保健食品,同时也是欠发达地区主要经济收入之一,生产意义重大。据联合国粮食及农业组织统计,我国地瓜种植面积约为3.673×16 hm2,约占世界地瓜种植总面积的45.06%;总产量约为8.52万t,约占世界地瓜总产量的77.38%。我国地瓜种植面积和总产量均居世界第一。目前,小规模种植的地瓜秧收割主要依靠人工,由于地瓜秧交叉缠绕以及瓜秧垄间生根,造成拖拽困难,劳动强度大,人工收割费时费力。
针对以上问题,设计出一种齿状切刀式偏心轮地瓜秧收割机,以代替人工出现地瓜秧的收割工作。该机适用于我国小规模种植地瓜的农村地区,具有结构简单、生产成本较低、操作方便、工作效率高等特点。
1主要结构及工作原理
1.1 基本结构
RN1901型齿状切刀式偏心轮地瓜秧收割机主要包括机架、存储箱、齿状切刀、齿状切刀和抓秧器。该收割机本身无需动力,通过农用拖拉机牵引工作,其结构示意如图1所示。
1.2工作原理
齿状切刀式偏心轮地瓜秧收割机通过农用拖拉机牵引工作,本身无需提供动力,在工作时,齿状切刀①倾斜安装,用于切断垄上地瓜秧根部与地瓜连接部分;齿状切刀②安装于机架两侧,相对于齿状切刀①较大,用于切断两垄之间地瓜秧的连接;抓秧器位于机架后方,通过偏心轮作用推动抓秧杆,抓秧杆与地面或者地瓜秧接触,利用拖拉机的牵引运动带动抓秧器旋转,抓秧杆抓取地瓜秧放入存储箱,此时,抓秧杆从偏心轮高点回落,缩入抓秧器内,松开抓取的地瓜秧,以实现地瓜秧的自动收割。
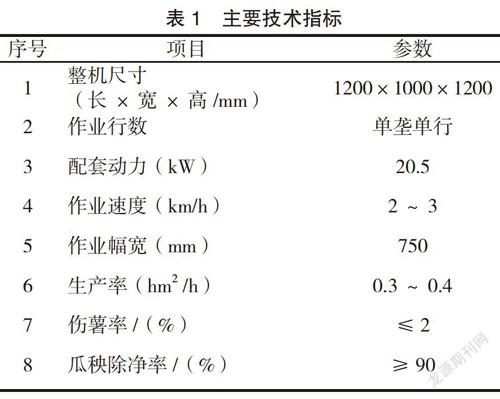
1.3主要技术参数
1.4关键部件设计
1.4.1齿状切刀
切刀是地瓜秧收割机的重要工作部件,其切割性能直接影响作物的收获质量和效果。考虑到地瓜秧生长秧蔓长、易缠绕的特点,本设计选用结构简单,性能稳定的圆盘式切割方式,结构如图2所示。该刀具采用滑切的方式,降低了切割阻力和功率消耗,减少了刀具的疲劳损伤。
齿状切刀②直径取50cm,以防止由于切刀过小出现的收割机整体压在垄上,齿状切刀②与垄间地面不接触的现象。此外,齿状切刀②与齿状切刀①原理相同,只是大小不一致,因此在进行收割工作之前只要调整好齿状切刀①的位置就可同时实现垄上地瓜秧的切割。
1.4.2抓秧器
地瓜秧夾持输送装置,即抓秧器,在地瓜秧收割机中具有很重要的地位,夹持输送的稳定性,直接影响到瓜秧收获除净率的提高。根据地瓜秧交叉纵横的特点,RN1901型齿状切刀式偏心轮地瓜秧收割机采用图3所示的抓秧器。
抓秧器由支撑轴、偏心轮、弹簧、抓秧杆、和滚筒构成,位于地瓜秧收割机的后侧,在齿状切刀①和齿状切刀②切断地瓜秧之后将地瓜秧进行收集并放入存储箱中。
在抓秧器运行过程中,抓秧器中间支撑轴和偏心轮固定不动,由于弹簧的弹力作用,使抓秧杆贴近偏心轮。抓秧器下部抓秧杆与地面或者地瓜秧接触,在拖拉机的牵引力下抓秧杆带动滚筒向前滚动,当抓秧杆到达远离偏心轮的旋转中心位置时,偏心轮将抓秧杆推出,此时抓秧杆抓取地瓜秧;当抓秧杆到达靠近偏心轮旋转中心位置时,在弹簧作用下将抓秧杆推入滚筒内部,抓秧杆收缩,将抓取的地瓜秧松开,此时地瓜秧进入存储箱储存。
抓秧器中偏心轮与支撑轴之间的位置可调,通过调整偏心轮在支撑轴上的位置,使得抓秧杆在远离存储箱人口时在偏心轮的作用下伸出,到达底端时抓取地瓜秧,并使地瓜秧随着滚筒的转动缠绕在滚筒上;使得抓秧杆在靠近存储箱入口时抓秧杆缩入滚筒内部,避免与存储箱入口碰撞的同时将抓取的地瓜秧放开。
1.4.3抓秧杆
抓秧器位于抓秧器上连杆处,中抓秧杆如图4所示,抓秧杆上设置六条竖直杆,每条杆上套有弹簧,用于抓秧杆的收缩运动,避免杆与地面或者存储器入口的碰撞。最中间两条杆之间距离较宽,目的防止中间的杆在抓取地瓜秧时对地瓜造成损伤。六根杆对称分布且长短不一,靠近中间的杆较短,外侧的杆较长,这是由于地瓜怕涝,目前普遍采用成垄种植模式,长短不一的杆可实现对垄上地瓜秧的抓取和垄间地瓜秧的抓取,避免出现由于杆长相同使得外侧杆悬浮而无法抓取垄间地瓜秧的现象,图5为抓秧杆与地垄示意图。
1.4.4滚筒
抓秧器中滚筒如图6所示,滚筒两侧支撑杆呈辐射状,既用于支撑滚筒外圆,又与抓秧杆配合,使抓秧杆在辐射状支撑杆上滑动,确定抓秧杆的移动轨迹。滚筒中间支撑杆数目与辐射状支撑杆一致,中间支撑杆上开设小孔,用于抓秧杆的伸缩,小孔位置与抓秧杆上的杆位置一一对应。
抓秧器滚筒本身不提供动力,由于抓秧杆与地面或者地瓜秧的接触,以及拖拉机的牵引作用,抓秧杆会形成旋转运动,且根据抓秧杆与滚筒的配合,抓秧杆带动滚筒实现旋转运动。基于这种抓秧杆和滚筒的旋转运动,将地瓜秧缠绕于滚筒上,最后放于存储箱中。图7为抓秧器工作示意图。
3结论
对关键部件进行了结构设计和参数分析,确定了仿齿状切刀和抓秧器的结构参数和运动参数;使用圆盘式齿状切刀切断垄间瓜秧和垄上瓜秧,无需对切刀提供动力,随收割机向前运动即可切断瓜秧,防止收割瓜秧时对地瓜造成损伤设计出一种偏心轮抓秧器,该装置在偏心轮高点时推出抓秧杆,用以抓取瓜秧,通过抓秧器旋转到存储箱位置时抓秧杆从偏心轮高点回落,将瓜秧松开,放入存储器中,并且抓秧器同样无需提供动力,随收割机前进的同时旋转。
参考文献:
[1]高明珠.马铃薯收获机械发展探讨[J].农业科技与装备.2011(12):31-33.
[2]李宝筏.农业机械学[H].北京:中国农业出版社,2003:158-1 60.
[3]李洪民.国内外甘薯机械化产业发展现状[J].江苏农机化.2010(2):40-42.
[4]胡良龙,胡志超,田立佳等.我国丘陵薄地甘薯生产机械化发展研讨[J].中国农机化,2012(5):14-16.
[5]胡良龙,田立佳等.4GS-1500型甘薯宽幅收获机的研究设计与试验[J].中国农机化学报,2011(5):15-17.
[6]胡良龙,胡志超,王冰等.国内甘薯生产机械化研究进展与趋势[J].中国农机化,2012(2):14-16.
[7]胡良龙,田立佳,计福来等.国内甘薯生产收获机械化制因思考与探讨[J].中国农机化,2011(3):16-18.
[8]胡良龙,胡志超,谢一芝等.我国甘薯生产机械化技术路线研究[J].中国农机化,2011(6):20-25.
[9]胡志超,彭宝良,尹文庆等.多功能根茎类作物联合收获机设计与试验[J].农业机械学报,2008(3):58-61.
[10]胡志超,王海鸥,胡良龙,等.马铃薯机械化收获技术概况与发展[J].农业机械,2007(4):63-65.
[11]胡志超,彭宝良,谢焕雄,等.升运链式花生收获机的设计与试验[J].农业机械学报,2008,39(11):220-222.
[12]黄霖.Abaqus /CAE二次开发功能与应用实例[J].计算机辅助工程,2011,(4):96-100.农业机械手册[H].机械工业出版社,1991.
[13]裴岩,樊柴管.甘薯机械的市场化研究[J].当代农机学术交流,2016 (8):72-73.
[14]施智浩,胡良龙,吴努,胡志超,王冰.马铃薯和甘薯种植及其收获机械[J].农机化研究,2015(4):265-268.
[15]施印炎,陈满,汪小旵,章永年,ODHIAMBO Morice Oluoch.芦蒿的有序收获机切割器动力学仿真与试验[J].农业机械学报,2017(2):110-116。
[16]L.U.Opara. Engineering principles ofagriculturalmachines在[J].Computers and Electronics inAgriculture,1997,18(1):55-57.
[17]M. Bentini,C. Caprara,R. Martelli. HarvestingDamage to Potato Tubers by Analysis of Impactsrecorded with an Instrumented Sphere[J]. BiosystemsEngineering,2006,94(1):75-78.
作者简介:李慧(1991-),女,山东省临沂市,研究生,助理工程师;林伟(1994-),男,山东省临沂市费县,硕士,研究方向:數字化设计与制造;孙策(1995-),男,河南省驻马店市,本科,硕士在读,研究方向:先进制造技术;郭春瑶(1996-),女,山东省淄博市,本科。
猜你喜欢
幼儿教育·父母孩子版(2021年6期)2021-08-05
名城绘(2020年2期)2020-10-21
快乐作文(1.2年级)(2020年10期)2020-09-10
农民致富之友(2020年20期)2020-07-18
价值工程(2019年29期)2019-11-11
幼儿教育·教育教学版(2019年9期)2019-02-02
农民致富之友(2018年7期)2018-05-04
科技视界(2017年5期)2017-06-30
创新作文(3-4年级)(2016年5期)2017-05-16
中老年健康(2016年5期)2016-06-13
