水介质中降落球形塑料颗粒与静止气泡的黏附行为
2019-09-10 00:50陈露阳孙志强
北京航空航天大学学报 2019年8期
陈露阳,孙志强
(中南大学 能源科学与工程学院,长沙410083)
近年来,高性能塑料在航空航天、能源动力、化工建材等领域得到广泛应用,但由于塑料不易降解,因此带来严重的环境污染问题。微塑料污染在国际上备受关注,相关研究发现,全球233种海洋生物消化道内存在微塑料颗粒[1]。2018年欧洲消化医学会肠胃病学学术会议指出,人类粪便样品中首次发现微塑料,塑料微珠一旦进入人体将很难移除。如何实现塑料微珠的高效回收利用已成为当今社会所面临的重要课题。
浮选是矿物加工中获得高质量精矿的有效手段,利用矿物表面物理化学性质的差异,使疏水性矿粒附着于气泡上形成气固联合体,使之与废弃物料分离的一种选别技术。在自然状态下,大多数塑料是疏水的,即可浮的[2],因此将浮选法用于塑料微珠的回收具有广阔的前景。
浮选过程可分为碰撞、黏附和脱附3个阶段。其中,颗粒和气泡的碰撞主要受两者相对运动的影响[3-5];微塑料多为肉眼难以辨识的微米颗粒,脱附可以忽略[6]。相对而言,黏附作用机理复杂,目前尚无合适理论可对其进行准确描述,大多采用间接实验,通过对不同条件下浮选回收率的检测以反映黏附效率的高低[7-9]。通过这些实验可以得到实验条件对浮选过程的总体影响,但不能细分出各个阶段的作用行为及其特性。本文旨在不干扰自然黏附过程的条件下,采用非接触式的高速测量方法,为揭示黏附行为和机理提供直观参考。
目前高速摄像技术飞速发展,已广泛应用于多相流非接触式检测中,因其精度高、速度快等特点,可完成对肉眼无法辨识现象的记录。丁水汀等[10]通过高速摄像机拍摄涡轮叶片尾缘带隔板的复合通道内的流动形式,研究该结构对流动的影响。高倩等[11]通过高速摄像机拍摄了蜻蜓爬升飞行过程,进行了仿生流体力学的研究。在浮选理论研究中,高速摄影技术也被应用于对浮选过程的观测。Verrelli等[12]用高速摄影仪研究了颗粒形状对黏附时间的影响。Krasowska等[13-14]通过图像法研究了自由上升气泡与平板碰撞时三相接触线形成与扩展的过程。
综上所述,学者们采用高速摄影技术对气泡颗粒的相互作用的研究对象多为实际矿粒或进行了表面改性的玻璃微珠,对气泡和塑料的相互作用也主要集中于气泡与塑料平板的作用或者粉碎的废旧塑料颗粒,其粒度未达到微米级。基于微塑料污染的背景,本文借鉴前人研究结果,简化气泡颗粒相互运动的过程,通过高速摄影仪观测水介质中塑料颗粒与静止气泡的黏附行为,从颗粒在气泡表面滑动的角度变化出发,得到颗粒在气泡表面的运动规律,并研究了颗粒和气泡尺寸对黏附行为的影响。
1 实 验
1.1 实验系统
颗粒黏附行为观测实验系统如图1所示,主要组成部分为高速摄影仪、变倍显微镜头、光源及黏附发生装置。
高速摄影仪及变倍显微镜头是观测系统中的关键设备。在塑料颗粒与气泡碰撞黏附的过程中,塑料颗粒、气泡尺度小,二者相互作用时间短,需要高精度的摄影装置。根据实验中气泡和颗粒的尺寸,本文选用可实现6.75倍放大倍率的显微镜头配合高速摄影仪进行拍摄,拍摄频率为2 000帧/s,分辨率为1 280像素×800像素,以保证清晰拍摄出气泡颗粒相互作用的微观过程。高速摄影仪被置于三维移动平台上,便于在实验过程中的微调。颗粒-气泡黏附的发生是在抛光石英玻璃制成的玻璃槽中进行的,其透光性好、表面平整,可防止在拍摄过程中因表面不光滑造成的光学畸变,尺寸为70mm×70mm×70mm。玻璃槽上方由定位盖板固定一支用于制造静止气泡的气密注射器及一个用于控制颗粒下落轨迹且方位可微调的漏斗,滴管放置于漏斗中用于向玻璃槽内引入实验颗粒。所有实验装置均置于光学平台上以减少周围环境的振动对实验造成的影响。
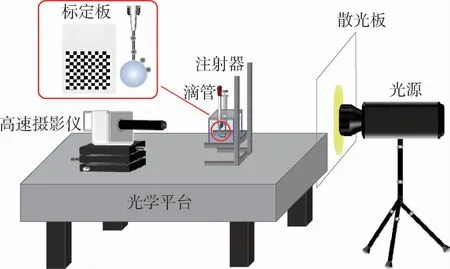
图1 颗粒黏附行为观测实验系统示意图Fig.1 Schematic of experimental system for observing particle attachment behavior
1.2 实验对象
疏水颗粒可黏附于气泡表面,为观测到颗粒与气泡的黏附行为,选用球型聚甲基丙烯酸甲酯(Polymethyl Methacrylate,PMMA)颗粒作为实验对象,对其进行清洗等表面预处理,经激光粒度仪检测,颗粒直径Dp主要分布于100~220μm,通过SEM观测颗粒结果如图2所示,易知球形塑料颗粒有一定分散度,形状为近似球形,表面无不规则变形。将塑料颗粒制成压片,检测出材料表面接触角θ=117.49°,符合疏水材料特性。实验介质为纯净水,以减少其他成分对实验的影响,气泡直径Db为1.2~1.5mm。
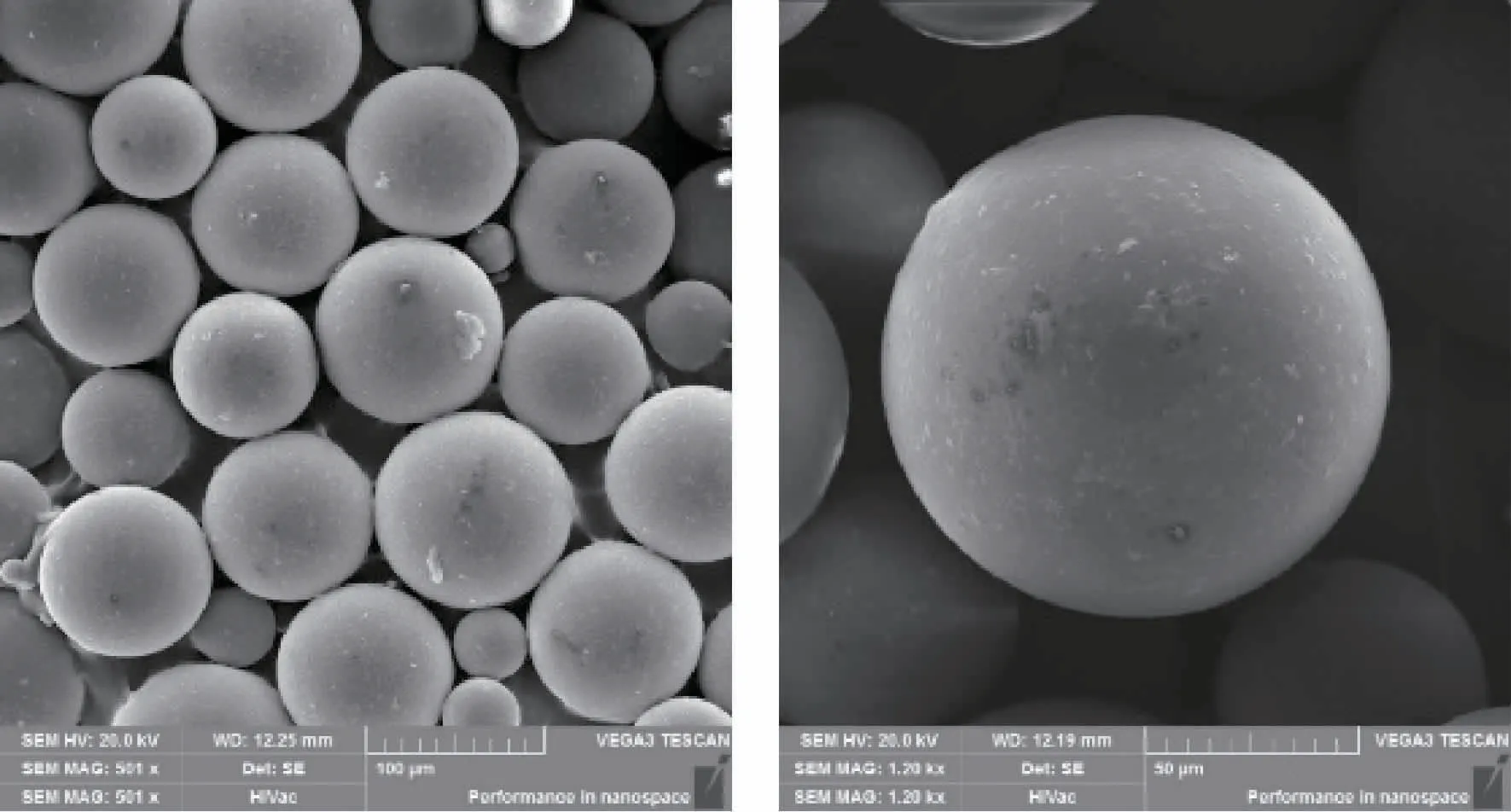
图2 PMMA颗粒表面SEM扫描结果Fig.2 SEM micrographs of PMMA particles’surface
1.3 实验过程
用10μL气密注射器向玻璃槽的纯净水中打入适量空气,形成微小气泡并附着在平头针头的前端,调整高速摄影仪镜头,使气泡最大截面位于焦平面上。微调注射器旁的标定板,使其端面与气泡最大截面平齐,通过三维移动平台水平调节高速摄影仪,使标定板位于画面中央,调整光源强度使图像轮廓清晰,拍摄一组照片作为后处理时的备用标定图像。再次水平调节高速摄影仪直至气泡重回图像中心,过程中不改变镜头参数。微调气泡上方滴管定位管正对气泡顶端,用滴管吸入分散着PMMA颗粒的水溶液,置于漏斗中,颗粒在滴管中受重力作用自由沉降,经由定位漏斗与气泡表面碰撞、黏附,并用高速摄影仪完整记录此过程。
2 数据处理
在PCC(Phantom Camera Control)软件中播放实验视频,激活跟踪测量工具,选取目标颗粒后,根据颗粒尺寸设置合适的搜索区域,并调整跟踪灵敏度,确保在不跟丢的情况下获取最高的准确度,绘制出颗粒运动轨迹,如图3所示。对多组实验进行观测后发现,黏附过程中颗粒会有“陷入”气泡表面的行为,见图3中箭头标示处。
通过软件进行轨迹追踪,实现了黏附过程的定性测量,再使用MATLAB编写图像处理程序实现对过程的定量描述。调用标定板识别程序,分别对每组实验前拍摄的标定板图像进行处理,获取像素数与实际尺寸的比例关系,对同组比例值取平均用于气泡颗粒尺寸换算。通过PCC软件将所需实验现象段转存成图片,导入图像处理程序中,实现对气泡和目标颗粒轮廓的识别,结果如图4所示。其中大圆为气泡轮廓,小圆为目标追踪颗粒,获取颗粒运动时的位置坐标、颗粒运动过程中相对于气泡中心的偏转角及颗粒与气泡中心的距离等特征参数,再根据比例关系计算出颗粒和气泡直径。

图3 气泡表面的颗粒运动轨迹追踪Fig.3 Tracking of particle trajectory on bubble surface

图4 图像识别结果Fig.4 Image recognition result
3 结果与讨论
3.1 识别方法验证
实验中气泡尺寸通过进气量控制,因气泡尺寸较小,未发生明显形变,假设气泡为球形,假设进气量即为气泡容积,可推算出气泡直径,将该值与通过图像处理得出的气泡直径相对比,计算得理论值和测量值误差约为2%,同组实验的相邻2帧图像识别出的气泡和颗粒尺寸误差小于0.5%,且识别出的颗粒直径均在100~220μm,与实验前用过激光粒度仪检测的颗粒粒径相吻合,因此认为本文识别方法有效。
3.2 滑动黏附
通过实验观察,疏水性PMMA颗粒与气泡的碰撞和黏附过程主要有3个阶段。首先,颗粒以匀速运动接近气泡;然后,颗粒与气泡表面接触,颗粒速度减小;最后,颗粒所在点的气泡液膜突然破裂,颗粒“陷入”气泡表面,形成气液固三相接触线并逐渐扩张,形成稳定的黏附,沿气泡表面滑落至气泡底端,形成气泡-颗粒结合体。本文通过高速摄影仪记录了整个黏附过程,分析图像发现黏附现象可分为2种,本文定义为滑动黏附和碰撞黏附。
在颗粒刚与气泡接触时,二者中心线与过气泡中心直径的夹角,即碰撞角φ0>15°时,颗粒会在气泡表面先滑动一段时间后黏附,即滑动黏附现象。图5记录了滑动黏附过程中不同时刻颗粒在气泡表面的相互作用状态。实验中 Dp=179μm,Db=1.41mm,通过图像处理得到颗粒-气泡中心距D与颗粒运动时间t的关系,如图6所示。在20ms之前,颗粒-气泡中心距变化较快,靠近气泡的过程中,径向速度逐渐减小,40ms时颗粒接触到气泡,颗粒沿气泡外轮廓滑动,颗粒-气泡中心距维持在0.80mm左右,197ms时出现“陷入”现象,颗粒-气泡中心距发生突变,即在该时刻气泡液膜破裂并形成三相接触线,随后三相接触线扩展至稳定状态,之后颗粒沿着气泡外轮廓运动,颗粒-气泡中心距不再变化,颗粒在气泡底端停留。
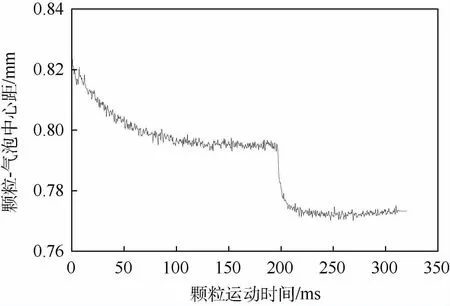
图6 滑动黏附中的颗粒-气泡中心距变化Fig.6 Variation of center distance between particle and bubble during sliding attachment
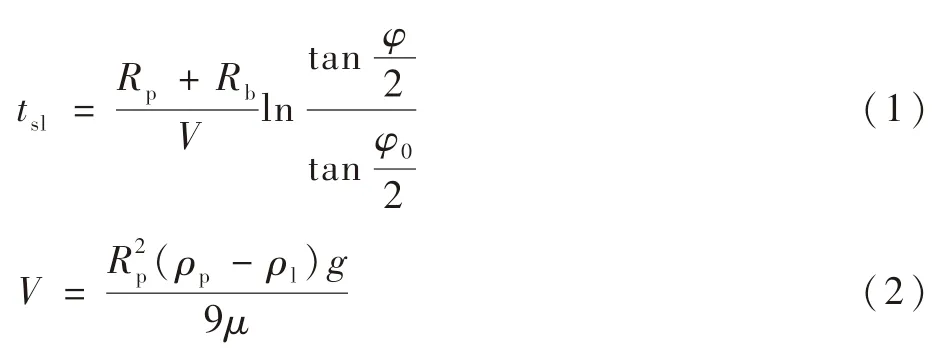
在浮选理论中,在只考虑重力、浮力和曳力平衡的条件下,颗粒偏转角与颗粒-气泡接触时间tsl的关系为[15-17]式中:g为重力加速度;φ为气泡和颗粒中心点连线与过气泡中心直径的夹角,本文称为颗粒相对于气泡的偏转角;Rp为颗粒半径;Rb为气泡半径;V为斯托克斯沉降速度;ρp为颗粒密度;ρl为液体密度;μ为液体的动力黏度。经验证,本实验中颗粒在与气泡接触之前已达到终端沉降速度,即斯托克斯沉降速度。
但从实验结果看,颗粒在靠近气泡表面时有明显的减速运动,即气泡的边界对颗粒的运动有影响,气泡表面粒子速度的下降是由壁面效应引起的。因此,Nguyen等[17-19]在式(1)的基础上引入了修正因子f,f为相对于气泡表面的粒子径向位置的函数,得出颗粒偏转角与颗粒-气泡接触时间的关系为

当气泡表面为滑动表面时,修正因子f按式(4)计算;界面为非滑动边界时,修正因子f按式(5)计算:

式中:H为颗粒和气泡表面之间的最短分离距离,H=D-Rp。
对式(3)进行积分计算,将颗粒接触气泡初始时刻记为0时刻,代入碰撞角φ0,可得到不同边界条件下颗粒-气泡接触时间与偏转角的关系。Nguyen和Evans[17]将经表面处理的直径为132μm的玻璃微珠在Db=1.8mm的气泡表面运动行为与理论模型进行了对比,研究表明,滑动边界层模型与实验值近似度更高,但关于滑动角速度的理论预测始终低于实验值。本文在更大的粒度和气泡尺寸范围内,仅考虑颗粒自有性质情况下,对实验值与理论预测值进行对比,结果如图7所示。理论预测值与实验值仍有一定的偏差,2种假设的预测值对角速度的估计均小于实验值。因此,仅考虑3种作用力及气泡界面的作用的模型不足以描述此过程,还应考虑到流动力对颗粒的作用[20]。
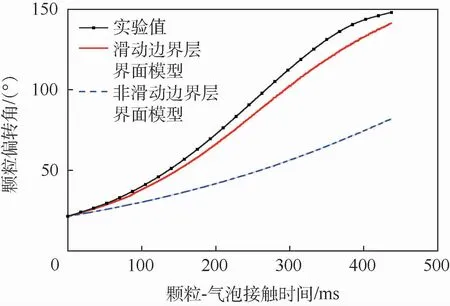
图7 滑动黏附中颗粒的运动偏转角Fig.7 Particle movement deflection angle during sliding attachment
3.3 碰撞黏附
在φ0<15°时,与之前的滑动黏附现象不同,会出现碰撞黏附现象,图8记录了碰撞黏附过程中不同时刻颗粒在气泡表面的相互作用状态。通过图像处理得到颗粒-气泡中心距D与颗粒运动时间t的关系,如图9所示。实验中,Dp=200μm,Db=1.32mm,在35ms之前,颗粒-气泡中心距变化较快,靠近气泡时径向速度有所减小,60 ms时颗粒接触到气泡,由于运动方向几乎垂直于气泡上表面,颗粒的动量较大,与气泡表面接触后立即相互作用发生黏附,颗粒-气泡中心距维持在0.74mm左右,93ms时出现“陷入”现象,气泡表面液膜破裂,形成三相接触线并扩展至稳定状态,之后颗粒沿着气泡外轮廓运动直至气泡底端,此过程中径向速度恒定,中心距先保持在0.75mm左右,后来因颗粒滑动至焦平面前端,使得中心距有所减小。

图8 颗粒在气泡表面的碰撞黏附Fig.8 Collision attachment of particle on bubble surface
同样,将实验条件应用于理论公式中,得到碰撞黏附过程中不同边界条件下颗粒-气泡接触时间与偏转角的关系如图10所示。偏转角的实验值介于通过滑动边界层假设和非滑动边界层假设算出的理论预测值之间,且在黏附作用发生之前,2种理论预测值和实验值的吻合度很高。在黏附作用发生之后,颗粒滑动角速度与滑动边界层假设近似,即颗粒“陷入”气泡表面后,其在三相接触线中运动时主要受到滑动边界作用,从而在碰撞黏附过程中,颗粒主要受重力、浮力、曳力的作用而运动,如图11所示。

图9 碰撞黏附中的颗粒-气泡中心距变化Fig.9 Variation of center distance between particle and bubble during collision attachment
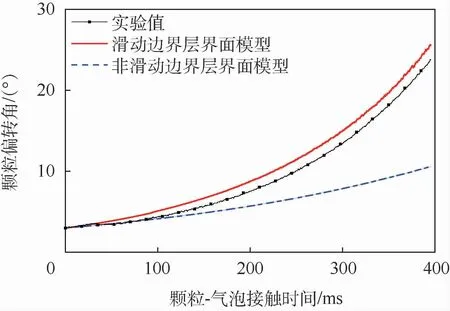
图10 碰撞黏附中颗粒的运动偏转角Fig.10 Particlemovement deflection angle during collision attachment

图11 陷入深度与陷入时长Fig.11 Depth and time of“jump in”phenomenon
感应时间[21]为颗粒与气泡从接触到稳定黏附到气泡表面所需的时间,与颗粒粒度、气泡尺寸、液体环境等多种因素有关。经统计,本实验中同等气泡尺寸下,感应时间随碰撞角及颗粒尺寸的增大而增大。此外还发现,气泡和颗粒尺寸的变化对“陷入”现象即液膜破裂的时间影响不大,均持续约10ms。颗粒陷入气泡的深度Dj受气泡和颗粒尺寸的共同影响,约占气泡与颗粒直径之和的2%。
4 结 论
通过搭建颗粒与静止气泡碰撞实验台,本文在水溶液中研究了球形颗粒在气泡表面的黏附行为。利用高速摄影仪观测到了颗粒的不同黏附现象,分别从定性和定量的角度探索碰撞角与颗粒尺寸对黏附行为的影响。结果表明:
1)颗粒在气泡表面的黏附存在滑动黏附和碰撞黏附2种现象。
2)颗粒在气泡表面运动时偏转角随时间的变化规律,二者均受壁面效应的作用,且实验值与气泡滑动边界层假设吻合度更高。
3)在同等气泡尺寸下,感应时间随碰撞角及颗粒尺寸的增大而增大。
4)“陷入”现象中膜破裂时间与气泡、颗粒尺寸无关,基本维持在10ms左右。
猜你喜欢
钢管(2022年2期)2022-11-28
China’s foreign Trade(2021年6期)2021-12-26
新潮电子(2021年7期)2021-08-14
建材发展导向(2021年13期)2021-07-28
家庭影院技术(2020年2期)2020-03-25
儿童故事画报·发现号趣味百科(2019年9期)2019-02-02
意林(绘英语)(2018年1期)2018-04-28
科技资讯(2016年18期)2016-11-15
中华奇石(2015年7期)2015-07-09
中华奇石(2015年5期)2015-07-09