人形机器人正运动学分析
2019-09-10 21:55王南张海霞刘月英
大众科学·上旬 2019年8期
王南 张海霞 刘月英
摘 要:分析了NAO机器人的结构并对其各个关节做了简化处理,采用Denavit-Hartenberg法构建了NAO机器人的连杆模型和各个关节自由度的局部坐标系,基于构建的连杆模型推导出了NAO机器人的正运动学和逆运动学模型。
1.前言
机器人运动学是后续机器人一系列相关问题得到深入开发和钻研的基本保障。机器人运动学主要是分析机器人每个杆件的位姿变化与关节转角之间的关系,研究的重点在于机器人各个关节在空间中的变化与末端执行器(end effector)之间的位姿,常用的数学模型为基于Denavit-Hartenberg参数的齐次变换法。人形机器人运动学的分析需要面临的两种情况分别为:一种情况是已知各个关节转角求连杆的位姿,这种计算方式称为正运动学计算方式,本节所要着重研究的是NAO机器人的下肢连杆之间的运动学计算。
2.机器人的描述
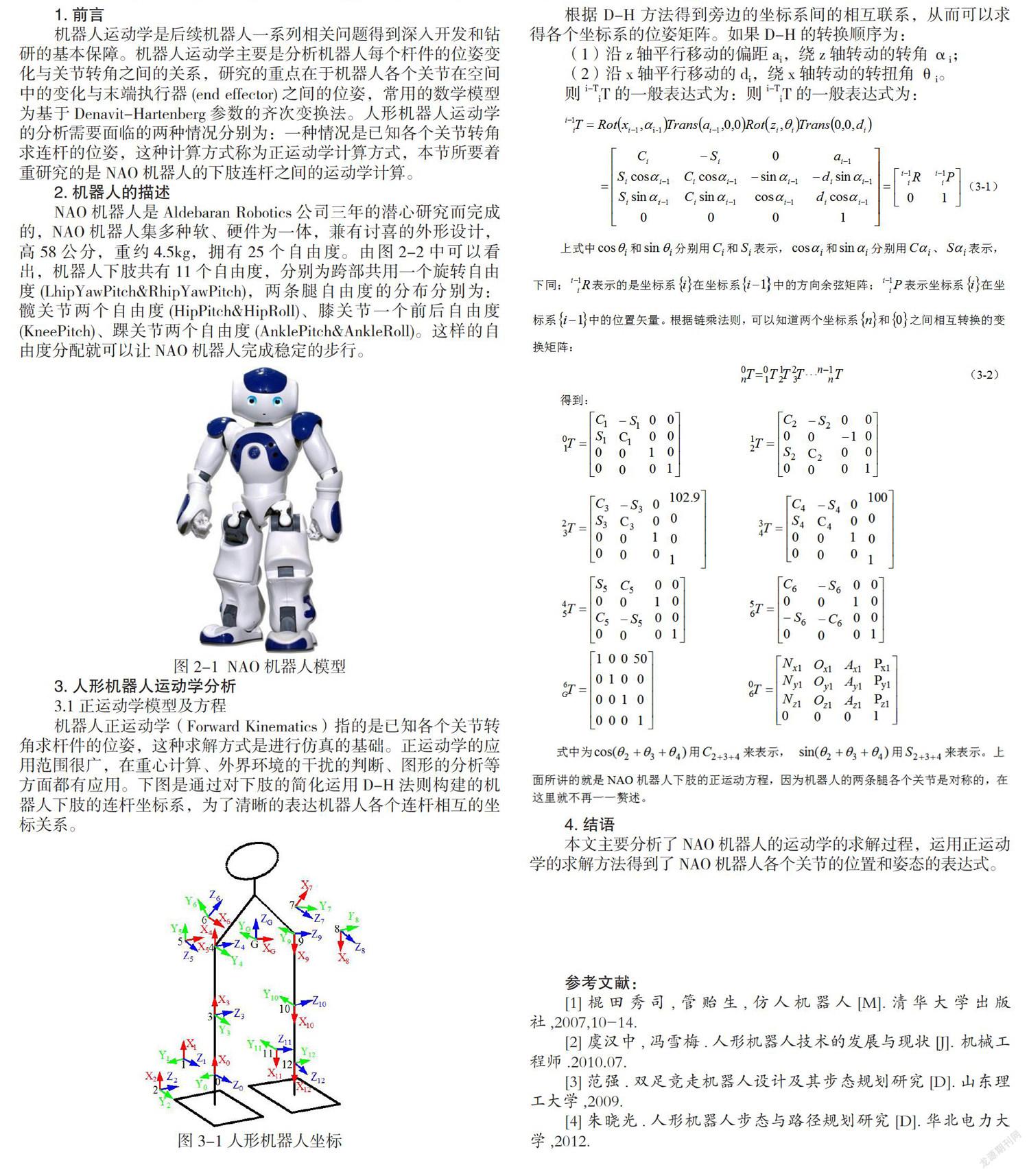
NAO机器人是Aldebaran Robotics公司三年的潜心研究而完成的,NAO机器人集多种软、硬件为一体,兼有讨喜的外形设计,高58公分,重约4.5kg,拥有25个自由度。由图2-2中可以看出,机器人下肢共有11个自由度,分别为跨部共用一个旋转自由度(LhipYawPitch&RhipYawPitch),两条腿自由度的分布分别为:髋关节两个自由度(HipPitch&HipRoll)、膝关节一个前后自由度(KneePitch)、踝关节两个自由度(AnklePitch&AnkleRoll)。这样的自由度分配就可以让NAO机器人完成稳定的步行。
3.人形机器人运动学分析
3.1正运动学模型及方程
机器人正运动学(Forward Kinematics)指的是已知各个关节转角求杆件的位姿,这种求解方式是进行仿真的基础。正运动学的应用范围很广,在重心计算、外界环境的干扰的判断、图形的分析等方面都有应用。下图是通过对下肢的简化运用D-H法则构建的机器人下肢的连杆坐标系,为了清晰的表达机器人各个连杆相互的坐标关系。
根據 D-H 方法得到旁边的坐标系间的相互联系,从而可以求得各个坐标系的位姿矩阵。如果D-H 的转换顺序为:
(1)沿 z 轴平行移动的偏距 ai,绕 z 轴转动的转角αi;
(2)沿 x 轴平行移动的 di,绕 x 轴转动的转扭角θi。
则i-TiT的一般表达式为:则i-TiT的一般表达式为:
4.结语
本文主要分析了NAO机器人的运动学的求解过程,运用正运动学的求解方法得到了NAO机器人各个关节的位置和姿态的表达式。
参考文献:
[1]棍田秀司,管贻生,仿人机器人[M].清华大学出版社,2007,10-14.
[2]虞汉中,冯雪梅.人形机器人技术的发展与现状[J]. 机械工程师.2010.07.
[3]范强.双足竞走机器人设计及其步态规划研究[D].山东理工大学,2009.
[4]朱晓光.人形机器人步态与路径规划研究[D].华北电力大学,2012.
作者简介:王南(1988.05—),女,河北省保定市人,保定市华北电力大学,机械工程专业,研究生
猜你喜欢
内燃机与配件(2022年2期)2022-01-17
小资CHIC!ELEGANCE(2019年20期)2019-07-02
中国建筑金属结构(2018年4期)2018-05-23
新高考·高一物理(2016年11期)2017-07-07
新高考·高一物理(2016年1期)2016-03-05
农家科技(2014年11期)2015-03-11
中学生数理化·高一版(2008年7期)2008-06-15