智能拐杖的设计与实现
2019-09-10 21:55王军李慧涛刘娜
大众科学·上旬 2019年8期
王军 李慧涛 刘娜
摘 要:本文设计了一种以STM32F103C8T6为核心控制器的智能拐杖。可以实现GPS定位、呼救、报警、避障等功能。设计中采用了多类型的传感器复合型求救系统,降低了系统报警的误报、漏报、错报的几率。基于GPS的智能拐杖可保障老人、盲人等弱势群体的出行安全,避免弱势群体碰到危险无法自救,具有广阔的市场空间与发展前景。
关键词:GPS定位;超声波避障;STM32F103单片机;倾斜判断
1 总体方案设计
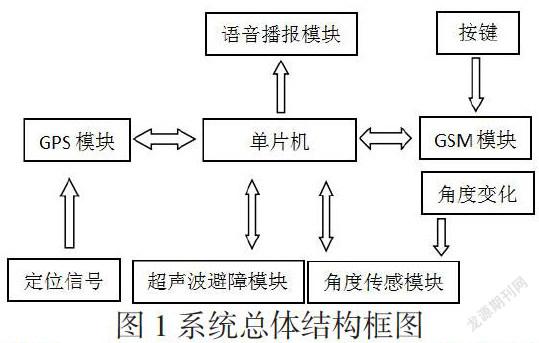
智能拐杖的主控芯片是单片机STM32F103C8T6,其连接各个模块以实现所需功能,总体结构框图如图1所示。GPS模块[1]负责接收卫星发出的相关数据,并将数据进行处理后发送给单片机。按下按键GSM模块[2]发送数据给指定用户。超声波避障传感器负责判断前方是否有障碍物,并将该信号经由电路发送给单片机。单片机程序控制蜂鸣器工作,并与用户设定的报警值进行比较。如果超过报警值则报警。倾角传感器测量拐杖的角度,以判断拐杖的状态。该系统可实现以下功能:
(1)为使用者提供位置信息,以及作为呼救的前置手段。信息会发送到已设定号码的手机中;
(2)提供险情求救功能,用于保障老人不会丢失以及户外爱好者的求救信号发送;
(3)测量拐杖的角度。配合蜂鸣器用于判定老人是否摔倒;
(4)超声波避障传感器检测前方有20cm范围内存在物体,则蜂鸣器报警,用于保障盲人的安全出行。
根据上述设计,结合实际情况,可确定系统所用模块的器件选型。本系统采用STM32系列中的STM32F103C8T6为单片机控制器;GSM采用SIM900A GSM/GPRS模块;GPS采用NEO-7N-0-002-GPS芯片[3],非常适用于手持设备;超声波避障采用US-015超声波模块;电子围栏模块主要由程序完成;倾角传感器采用MPU6050芯片;语音播报模块采用SYN-6288芯片。
本次系统设计将GPS与GSM通信相结合,需要完成突发情况自动报警求救功能。SIM900A的动作基本都通过AT命令设置,传输所能达到的速度为85.6 kbps。GPS负责处理经纬度信息,并将其发送到相应的端口,最终经过GSM发送给所要求助的人。MPU6050倾角传感器主要进行摔倒判断。
2.系统软件设计
系统接上电源之后按下开始开关,整个系统就开始运作。接着就是将红外信号发送出去,再由系统接收回来,经过模块里面的程序处理,通过特定的算法可计算出距离。当与前方物体的距离在检测范围之内时,蜂鸣器不会发出声音,直到超出测量范围,才不会语音报警。电路板的倾斜状态决定是否触发摔倒报警。当使用者满足触发摔倒判定条件时,超过15秒没有按下解除报警按钮,就会自动将求救消息发送出去,从而起到对人的保护作用。
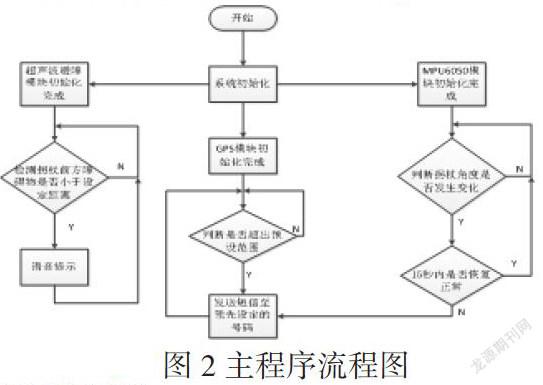
系统主程序流程图2所示。在主程序开始运行前需要先将NVIC中断分组设置,确定延时时间,设定定时器的计数频率为10Khz,初始化led所用的PA8和按键所用的PA0引脚,初始化IO串口波特率为9600b/s,led初始状态为0打开,蜂鸣器初始状态为1打开,所使用的是PC13引脚。然后延时500ms,关闭蜂鸣器。初始化MPU6050,读取数据进行测试。初始化GSM模块,设定字符集,延时1秒,设定文本模式,延时1秒。关闭LED灯。进行方位状态判断,出现异常,则启动语音播报模块报警提示,摔倒标志置1;没有异常,延时计数为0,摔倒标志为0;判断结束,清空检查计数和错误计数。如果摔倒标志为0并且检测到前方存在物体则语音播报模块报警,这个报警距离设定为50cm内。因摔倒报警超过15秒,打开LED灯,设定字符集、文本、求救号码,每个动作延时700ms。设定求救信息,判断有无GPS信号,如果有求救信息添加经纬度,否则添加gps linking...;延时200ms,发送求救信息。延时700ms,关闭LED灯,清除延时计数,按键延时计数清零。如果按下按键,清除延时计数,按键延时计数清零,关闭蜂鸣器。GPS模块主要进行经纬度的处理,角度传感器主要进行X轴的判断比对。然后与预设值进行比较完成相应的各种功能。
3.系统调试与测试
系统测试前先要进行调试[4],在焊接时由于直接相交线过多,为了方便观看与焊接,多采用跳线进行焊接,实物如图3所示。在焊接完成以后采用分模块调试法,分别将MPU6050倾角传感器、US-015超声波传感器、GSM_SIM900A模块、NEO-7N GPS模块的功能单独测试;US-015超声波传感器[5]独立于其他模块,主要和蜂鸣器电路配合完成回避前方障碍物的功能;MPU6050倾角传感器主要进行角度倾斜判断,结合蜂鸣器电路进行报警,结合GSM_SIM900A模块和NEO-7N GPS模块进行求救以及发送位置信息,通过指示灯及相关现象检查是否符合预期。在模块的调试过程中,从局部到整体依次依次进行调试,以确保整个系统的稳定运行。
在正确完成本次实物的焊接后,由于考虑到拐杖的使用环境,故将US-015超声波传感器的报警距离设为50cm,触发老人跌倒判断后设定15秒的解除报警时间,用于避免误报警。当检测前方50cm内存在障碍物时,报警装置会发出报警信息。当物体距离电路板20cm内时,蜂鸣器发出警报;当障碍物消失或者远离则停止报警。发送的求救短信有两种,一种是GPS模块收到的位置定位信号,此时会发送help me和经纬度信息;否则会发送help me和gps linking信息。
4.结论
本系统设计了一种以STM32F103C8T6为控制器的智能拐杖,可实现GPS定位、呼救、报警及避障等功能。硬件方面根据实际情况选用了能实现相应功能的传感器,软件方面通过各子程序的相互配合实现各种功能,从而降低了系统的误报、漏报及错报的几率。同时设计按键电路对呼救功能加以保障,避免弱势群体碰到危险无法自救,满足了用户的基本需求。
參考文献
[1]于超越. 基于单片机的GPS定位系统设计与实现[C].互联网论文库, 2016.
[2]杜春雷. ARM结构体系和编程[M].清华大学出版社.2009, 18~19.
[3]辛春霞.项目驱动教学探索--红外报警器的分析与制作[J].科技视界, 2013, 30: 235~236.
[4]景雷. 行驶工况数据采集设备的开发与系统集成[D].天津理工大学, 2014.
[5]嵇萍. 基于单片机的自动避障小车设计[J]. 苏州市职业大学学报, 2013, 01:39~41.
作者简介:王军,男,宁夏理工学院,宁夏石嘴山市大武口区,助教,研究方向:无线通信技术
猜你喜欢
快乐作文(1.2年级)(2022年5期)2022-05-31
新高考·高二数学(2022年3期)2022-04-29
三悦文摘·教育学刊(2021年52期)2021-04-27
电脑报(2020年12期)2020-06-30
少年文艺·开心阅读作文(2019年8期)2019-09-12
数学大王·低年级(2019年8期)2019-08-27
魅力中国(2018年41期)2018-03-22
软件导刊(2016年7期)2016-05-14
科技创新导报(2016年5期)2016-05-14
中国信息技术教育(2014年15期)2014-09-27