
工业机器人集成开发中的协议与数据开放标准化
2019-09-10 07:22杨舸
中国质量与标准导报 2019年8期
杨舸






摘要:工业机器人在工业化生产中的应用越来越广泛,2016年工业和信息化部、国家发展和改革委员会、财政部联合印发的《机器人产业发展规划(2016—2020年)》中指出,虽然我国机器人产业已经取得了长足进步,但与工业发达国家相比,还存在较大差距,主要表现在机器人产业链关键环节缺失,零部件中高精度减速器、伺服电机和控制器等依赖进口。目前,以国家质量基础的共性技术研究与应用(NQI)重点专项,“智能制造基础共性和关键技术标准研究”项目(编号:2016YFF0202000)为核心的工业机器人标准正在如火如荼地制定过程中,而我国自2013年起已经成为全球第一大工业机器人应用市场,主要集中在二次集成开发,要想促进工业机器人本体及其关键零部件的国产化,提升二次集成开发的应用价值,很重要的一个方向是能通过协议以及数据开放的标准化达到各子系统或零部件之间的互联互通、互换及柔性控制。
关键词:工业机器人 集成开发 协议 数据开放 标准化 互联互通 互换 柔性控制
Protocol and Data Opening Standardization in Integration and Development of Industrial robots
Yang Ge (Shenzhen Institute of Standards and Technology)
Abstract: Industrial robots are used in industrial production more and more extensive, “Industry Development Planning of Robots (2016—2020)” released by ministries and commissions such as the MIIT, etc. indicated that, although robots industry has made great progress in China, but there is still a big gap from developed countries, it is expressed in missing key industry chain, high precision reducer, servo motor and controller are relying on import. At present, according to the “research on basic commonness and key technical standards of intelligent manufacturing” NQI major project (project NO. 2016YFF0202000), many industrial robots standardization will be released soon. Since 2013, it has become the largest industrial robot application market on secondary integration and development, to improving the status and nationalization of industrial robots and its key component, application value of secondary integration development, it is an important direction for achieving interconnection, interchangeability and flexible control between subsystems or components through protocol and data opening standardization.
Key words: industrial robots, integration and development, protocol, data opening, standardization, interconnection, interchangeability, flexible control
1 工業机器人的定义及结构组成
在现行国家标准GB/T 12643—2013《机器人与机器人装备 词汇》中对工业机器人的定义是:“自动控制的、可重复编程、多用途的操作机,可对三个或三个以上轴进行编程。它可以是固定式或移动式。在工业自动化中使用”。此定义也与国际标准ISO 8373中的定义保持一致。不同组织对工业机器人也有自己的定义,例如美国机器人工业协会(RIA)对工业机器人的定义为:“工业机器人是用来进行搬运材料、零件、工具等可再编程的多功能机械手,或通过不同程序的调用来完成各种工作任务的特种装置”。可见,从结构操作或应用等不同角度来定义其描述不尽相同。但通俗一点理解,工业机器人是面向工业自动化场景下的多关节机械手或多自由度的机器装置,它能自动执行工作,可编程,靠自身动力和控制能力来实现各种功能,通常装有刀具或其他辅助加工工具,能够搬运材料、工件,完成各种工序操作。
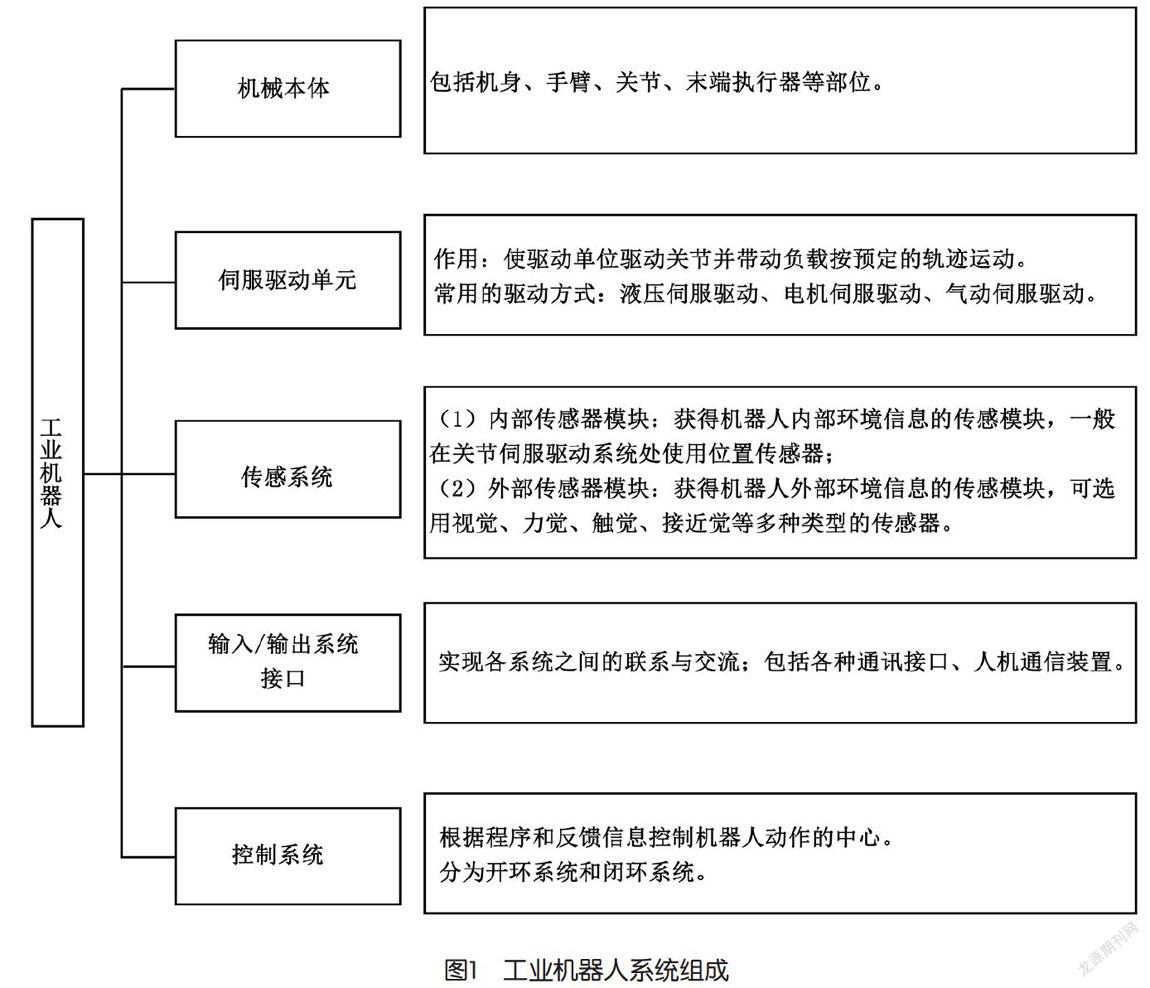
工业机器人的组成分硬件和软件两部分,按功能一般分为下列五个部分:机械本体、伺服驱动单元、传感系统、输入/输出系统接口和控制系统。各个系统的作用见图1所示。
2 工业机器人产业发展概况
当前,全球机器人市场规模持续扩大,据国际机器人联盟(IFR)数据显示,2018年全球机器人市场规模接近300亿美元,2013~2018年平均增长率约15.1%。工业机器人168.2亿美元,服务机器人92.5亿美元,特种机器人37.5亿美元。2018年,我国机器人市场规模预计达到87.4亿美元,2013~2018年平均增长率接近30%,工业机器人62.3亿美元,是全球第一大工业机器人应用市场。工业机器人产业可细分为三个主要的子产业,包括关键零部件产业、工业机器人本体产业、系统集成产业。
2.1 关键零部件
工业机器人产业的发展为其核心零部件的发展和应用创造了众多机会。工业机器人除本体以外,主要有三大核心零部件,包括控制器、伺服系统、减速器,它们占到工业机器人成本的70%左右。而随着人工智能浪潮的愈演愈烈,机器视觉系统也成了工业机器人不可或缺的一部分。
控制器是机器人的大脑,发布和传递动作指令。它包括硬件和软件两部分,硬件就是工业控制板卡,软件部分主要是控制算法、二次开发等。目前,国外主流机器人厂商的控制器均为在通用的多轴运动控制器平台基础上进行自主研发,各品牌机器人均有自己的控制系统与之匹配,国内企业控制器尚未形成市场竞争优势。现有的工业机器人控制器封闭构造,带来开放性差、软件独立性差、容错性差、扩展性差、缺乏网络功能等缺点,已不能适应智能化和柔性化要求。开发标准化、开放化控制器是工业机器人的一个发展方向,存在巨大发展空间。
伺服系統是工业机器人的关节,是工业自动化的重要组成部分,是自动化行业中实现精确定位、精准运动的必要途径,在机床工具、纺织机械和包装机械等领域得到广泛应用。机器人的关节驱动离不开伺服系统。关节越多,机器人的柔性和精准度越高,所需要使用的伺服电机数量就越多。工业机器人市场的快速增长必然带动伺服系统的市场规模不断上升。
减速器是工业机器人的神经。减速器指的是连接动力源和执行机构之间的中间装置,通常它把电动机、内燃机等高速运转的动力通过输入轴上的小齿轮带动输出轴上的大齿轮来达到减速的目的,并传递更大的转矩。大量应用在工业机器人上的减速器主要有RV减速器和谐波减速器。近年来,随着我国工业机器人应用市场的快速发展,工业机器人用减速器市场的需求规模也随之增长。
虽然减速器、伺服系统在工业机器人成本中所占比重较大,但国内减速器、伺服系统等关键零部件发展相对滞后,技术水平较低,产品稳定性差,与国外产品相比存在不少差距,导致国内工业机器人减速器、伺服系统等零部件主要依赖进口,国内企业工业机器人生产成本较高,竞争力较弱。
2.2 工业机器人本体
工业机器人的本体是指其机体结构和机械传动系统,也是工业机器人的支承基础和执行机构,主要包括传动部件、机身及行走机构、臂部、腕部和手部五个部分。本体是工业机器人的重要部分,所有的计算、分析和编程最终要通过本体的运动和动作完成特定的任务。工业机器人本体是系统集成及应用的中心,其性能决定了系统集成及应用技术的水平。
从产业链的角度看,工业机器人本体是机器人产业发展的基础。尽管在国家政策的大力推动下,国产工业机器人厂商规模不断扩大,但其核心零部件的缺失导致企业生产成本高企,企业的盈利能力不容乐观。此外,为应对新崛起的国产品牌,外资厂商纷纷采取降价的手段削弱国产工业机器人的市场竞争力。这些因素使得工业机器人本体产品的市场规模远远不如系统集成。
2.3 系统集成
工业机器人的系统集成包括计算机软件、硬件、操作系统技术、数据库技术、网络通信技术等的集成,以及不同厂家产品选型、搭配的集成。系统集成所要达到的目标是整体性能最优,即所有部件集成后相互协作,形成一个性能匀称、可扩充、可维护的全系统。工业机器人系统集成及应用技术是工业机器人商业化和大规模普及的关键。
2.3.1 工业机器人集成产业应用方向
工业机器人本体是系统集成的中心,必须与行业应用相结合。系统集成是对工业机器人本体的二次开发,本体的性能决定了系统集成的水平。国际品牌更清楚怎样去做整合来充分发挥功能达到客户的需求,所以系统集成还是以国际品牌为核心,市场大小也是按汽车、3C电子、金属加工、物流等技术要求高、自动化程度高的行业向技术要求较低、自动化程度较低的行业排列。
工业机器人下游最终用户可以按行业分为汽车工业行业和一般工业行业。汽车行业自动化程度已经比较高。大部分外资整车厂商的生产线标准及工业机器人选型是全球统一的,国产机器人难有机会。而在目前国产工业机器人技术尚未完全成熟的情况下,国产整车厂也不敢贸然使用国产工业机器人完成重要工位的自动化操作。汽车是技术密集型产业,整车厂在长期使用工业机器人的过程中也形成了自己的规则和标准。技术要求高且要契合车厂特有的标准,对系统集成商来说,构成了较高的准入门槛。多数国内集成商主要还是做一些分包或者不太重要的项目,少数已经入围的系统集成商获得了先发优势。一般工业中按行业分类又可以分为食品饮料、石化、金属加工、医药、3C、塑料、白家电、烟草等,按应用分为焊接、机床上下料、物料搬运码垛、打磨、喷涂、装配等,工业机器人的应用除了重复精度高、工作效率高等特点外,还能使工人从恶劣的工作环境中解放出来,具有较大的社会效益。
2.3.2 工业机器人集成产业规模
在工业机器人领域,我国企业目前主要的竞争优势在系统集成方面,80%的工业机器人企业都集中在该领域。随着系统集成商围绕工业机器人做整线集成,相关的专用设备和电气原件等的价格逐年下调,国内企业凭着性价比和服务优势逐渐替代进口,市场份额稳步上升,现已占据了半壁江山。工业机器人和系统集成是我国工业自动化发展方向,为推动制造业升级,实现自动化、智能化,国家高度重视工业机器人产业发展,从研发、采购、应用推广等多方面提供政策资金支持;集成系统的研发,是工业机器人产业链上利润最高也是技术门槛最高的环节。近年来,随着工业机器人产业的蓬勃发展,系统集成应用也逐年升温,备受追捧。集成系统以零配件和工业机器人为基础,是未来企业提高生产效率、增加市场竞争力的主要方式之一。一般情况下,系统集成市场规模可达机器人本体市场规模的三倍。根据中投顾问产业研究中心预测,2020年工业机器人本体市场规模可达276亿元人民币左右,集成系统市场规模则有望接近830亿元人民币,未来五年年均增速可达20%。
综上,“伺服系统”“控制器”“核心算法”“精密减速器”以及“应用和集成技术”这五大核心技术被誉为工业机器人本体的“成功五要素”。国产工业机器人本体产业要实现快速发展,在这五大领域中至少要在两到三个方面积累竞争优势。首先需在伺服系统和控制器两方面稳固根基,其次在核心算法方面要有所突破。国内工业机器人本体企业突破关键零部件有两种思路:一是走关键零部件自主研发路线;二是走深度合作路线,打通工业机器人产业上下游。工业机器人本体是自动化技术集大成者,在机器人产业链上议价能力最强,可以有效整合上游零部件企业和下游系统集成商。
3 工业机器人视觉集成系统协议标准化
3.1 概述
在我国工业机器人系统集成产业蓬勃发展的同时,也面临着诸多技术问题。以工业机器人与视觉单元集成为例,作为工业机器人的“大脑中枢神经”,人工智能在过去的几年里一直处于持续的高速发展阶段,很多工业机器人也已经具备了相当高的智能化特点,但是还远远达不到人类所设想的智能化程度。工业自动化的真正实现,需要高度智能化的工业机器人去替代人类的一部分工作,而想让工业机器人能很好地替代人类工作的话,首先要做的就是让它们能“看”得到,当工业机器人具备观察事情的能力时,才能够很好地对事情判断,从而做到智能化、灵活、自主地解决问题,而且在工业4.0的趋势下,智能制造对工业机器人的要求也越来越高,传统的通过编程来执行某一特定动作的工业机器人,将不再能满足制造业向前发展的需求。
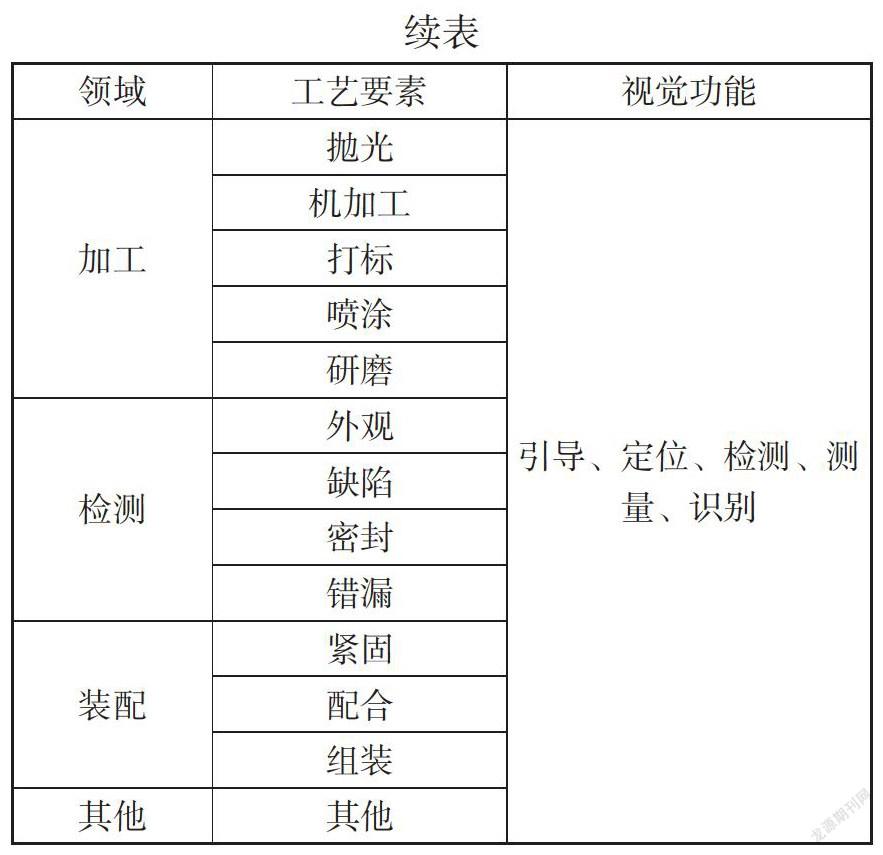
要工业机器人能“看”到,需要给工业机器人装上一双“慧眼”,以目前的主流技術来说,就是将工业机器人与视觉单元进行集成,形成工业机器人视觉集成系统,常应用于搬运、加工、检测及装配几大领域,各领域又分为多个工艺,在工业化大生产中的引导、定位、检测、测量、识别等多场景下进行应用。视觉单元是工业机器人的眼睛。工业自动化的实现需要高度智能化的工业机器人代替人类的一部分工作;而显然,如果想让机器人很好地替代人类工作,首先要确保它们能“看”得到,这就依赖于机器视觉系统来完成。机器视觉系统可以通过机器视觉产品即图像摄取装置,将被摄取目标转换成图像信号,传送给专用的图像处理系统,得到被摄目标的形态信息,根据像素分布和亮度、颜色等信息,转变成数字信号,然后图像系统对这些信号进行各种运算来抽取目标的特征,进而根据判别的结果来控制现场的设备动作。具体工艺要素及视觉功能如表1所示。
工业机器人与视觉单元的集成,除了各自满足产品所需要达到的安全、质量、可靠性等技术要求之外,还需要涉及多种技术的融合,例如装配技术、坐标系标定技术、通信协议适配技术等。工业机器人视觉集成系统的应用最基础需要实现的,就是不同品牌或种类的工业机器人与不同品牌或种类的视觉单元能够互联互通,只有实现了互联联通后,才有可能在不同应用场景下完成各种定制功能的集成开发。而实现不同工业机器人与视觉单元的互联互通所需满足的除了硬件物理接口的适配要求之外,通信协议的适配是不可或缺的重要手段之一。通信协议是指多方实体完成数据和信息交互或服务所必须遵循的规则和约定。通过通信信道互连起来的多个产品或设备,要使其能协同工作实现信息交换和资源共享,它们之间必须具有共同的语言。交流什么、怎样交流及何时交流,必须遵循某种互相能够接受的规则。
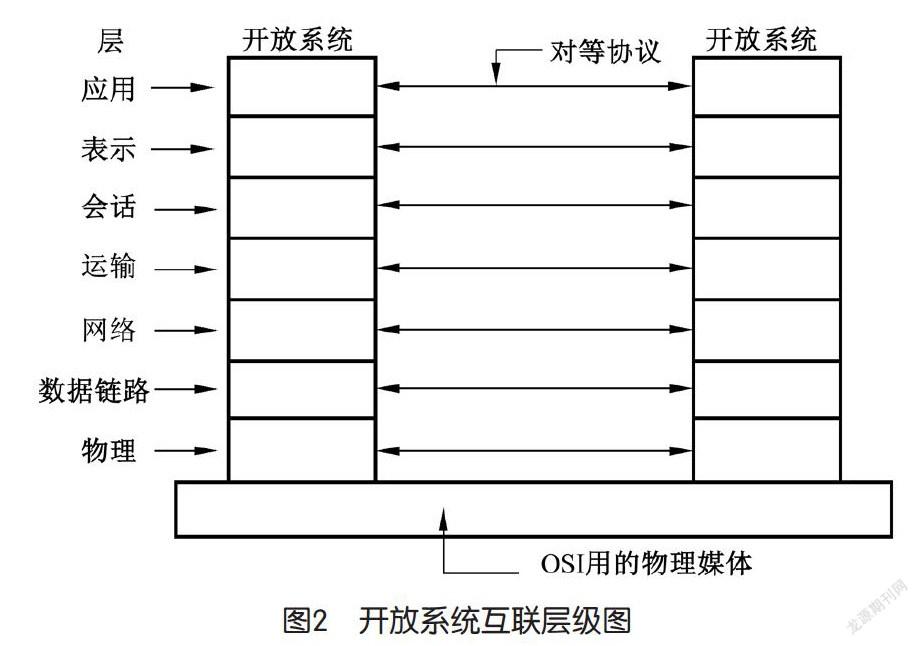
开放系统互连参考模型 (Open System Interconnect ,OSI)是国际标准化组织(ISO)和国际电报电话咨询委员会(CCITT)联合制定的开放系统互连参考模型,根据GB/T 9387.1—1998《信息技术 开放系统互连 基本参考模型 第1部分:基本模型》(等同采用ISO/IEC 7498-1:1994)中的定义,为开放式互连信息系统提供了一种功能结构的框架,从低到高分别是:物理层、数据链路层、网络层、运输层、会话层、表示层和应用层,层级结构详见图2。通常来说,物理层、数据链路层、网络层、运输层面向通信,而会话层、表示层及应用层是面向信息处理。
要实现不同厂家工业机器人与不同厂家视觉单元的互联互通需求,制定一套工业机器人与视觉单元厂家之间可以互相理解的“通用协议语言”至关重要。通过对多家工业机器人与视觉单元厂家调研发现,底层的通信协议部分,例如数据链路层以及运输层,各家均会根据不同应用场景采用不同的通用通信协议支持,工业机器人与视觉单元集成常用的通用通信协议、应符合的标准、适用的网络架构层次以及应用方式如表2所示。
对于面向通信的通用协议,均已标准化,且应用较成熟,除必要的再开发外,集成开发企业一般不会去更改现有的标准化协议,集成开发主要针对面向信息处理的互联层级进行,而且越面向高层级进行协议的定制开发,不同产品及设备厂家之间能达成一致的意愿和程度越强,因为需要开发的内容少,流程相对简化。
3.2 系统组成
工业机器人视觉集成系统可以抽象成由主控单元、工业机器人和视觉单元集成为一个软硬件平台,主控单元进行流程总控,工业机器人负责运动控制,视觉单元负责视觉信息处理。主控单元根据应用的实际情况主要有如图3所示两种形式:
1)主控单元、工业机器人和视觉单元相对独立,工业机器人和视觉单元分别与主控单元进行交互,如图3(a)所示;
2)工业机器人同时作为主控单元,与视觉单元进行交互,如图3(b)所示。
3.3 协议标准化
工业机器人视觉集成系统协议仅对应用层进行定义,对其他层级不做定义,通过对应用层报文格式,包括帧结构以及部件数据编码的定义,实现工业机器人和视觉单元的集成与互联互通。
在帧结构定义中,可以明确帧的字节长度、传输顺序,同时给出如表3所示的帧结构应用表,并在表中对字段名、字段长度以及定义进行详细的说明。
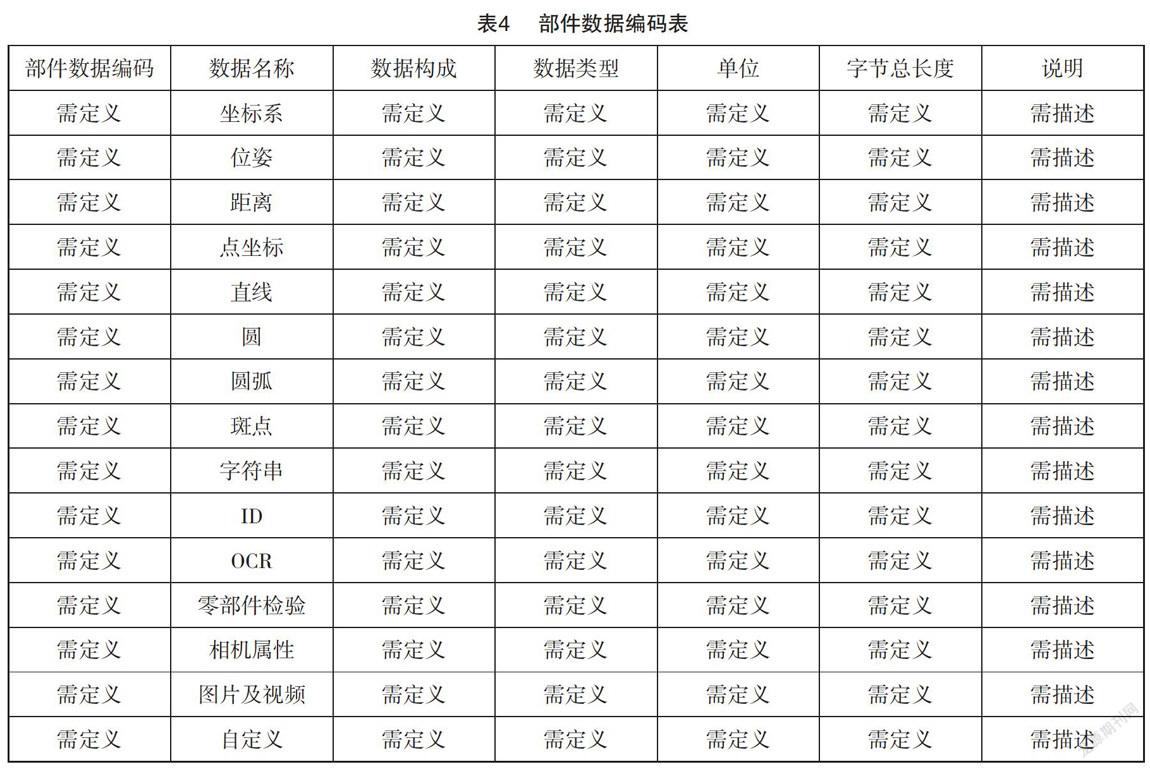
在部件数据编码定义中,可对表4所示的部件数据编码所占的字节位、数据名称、数据构成、数据类型、单位、字节总长度进行定义以及必要的说明。
对于视频流的传输协议,可以根据传输介质的不同,选择支持不同的传输协议,例如网线传输可采用GigE Vision协议,USB传输可采用USB3 Vision协议。
4 工业机器人数据开放标准化
4.1 概述
以工业机器人柔性控制技术应用为例,目前工业机器人多以“刚性”的角色出现在工业化制造现场,按照已编制好的程序,或视教方式进行运动控制。在智能制造、人工智能大背景的驱动下,未来工业机器人将朝着智能化、柔性化的方向发展。工业机器人柔性化之后,将具有更好的环境适应性、安全性、人机交互能力。柔性化的发展方向一种是制造材料的柔性化,例如外壳,一种是通过对关节等零部件的驱动实现。对于材料的柔性化,只能是部分结构材料在满足安全性的前提下选用柔性材料替代现在的金属或其他材料,而对于工业机器人内的控制器、伺服装置、减速机、其他辅助材料等比较难完全用柔性材料替代,这时候更多的是需要通过柔性控制技术来达到对工业机器人的柔性化实现,例如工业机器人和视觉的集成应用,增强机器人的“感知”能力,还可以通过对工业机器人驱动总线反馈的状态数据和外部传感器采集的传感数据,实时调整其运动规划进行点位控制或者连续路径控制的方式。
4.2 柔性控制技术及其实现
传统的工业机器人控制技术主要体现为,按照预先示教的点位和预先编好的程序实现指定路径的运动任务。而柔性控制技术是指工业机器人在实现传统运动控制任务的同时,通过感应外部环境实时调整运动轨迹以达到完成特定任务的控制方式,例如,拖动示教、交互示教、遥操作示教、碰撞检测、视觉引导等应用场景。
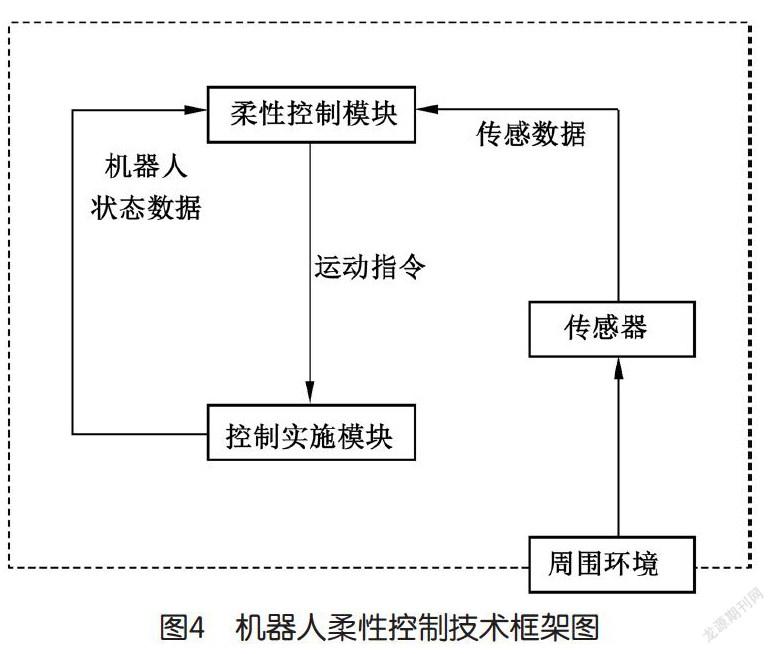
如图4所示,为柔性控制技术的基本实现框架图,主要通过柔性控制模块来实时调整工业机器人的运动轨迹。其中,工业机器人状态数据是指驱动总线反馈的电机位置、电机速度、电机力矩等数据,传感数据是指通过外部传感器采集的部分环境数据,比如力矩、图像、电压、电流等。
柔性控制模块的核心是实现柔性控制算法,例如信号处理算法、工业机器人动力学算法、图像检测与识别算法等。这些算法都需要一定的数据支撑,即前述的工业机器人状态数据和环境传感数据;同时也需要添加一些其他的辅助功能,比如DI/DO、文件读写、停止报错等。如图5所示为工业机器人柔性控制模块的基本实现方法,所需数据和辅助功能通过相应的接口与柔性控制算法进行交互,运动指令的下发既可以直接调用运动函数,也可以进行轨迹插补后给出具体的指令数据。
4.3 软件系统数据开放的标准化
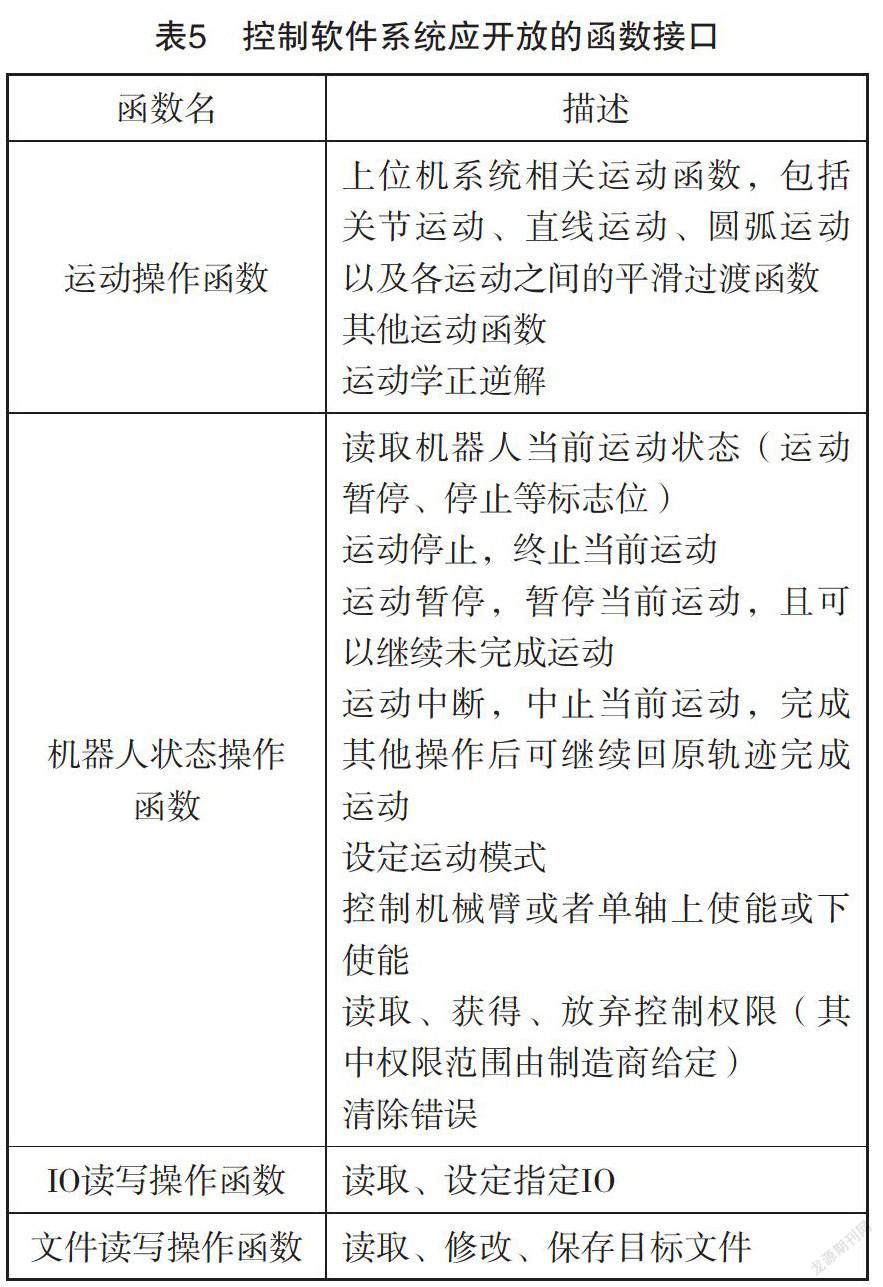
为实现对工业机器人的柔性控制,软件系统不仅要具有独立运行的控制软件系统和伺服驱动软件系统,而且要开放相应的数据接口以供柔性控制模块的二次开发调用,其中控制软件系统需要开放的函数接口如表5所示。
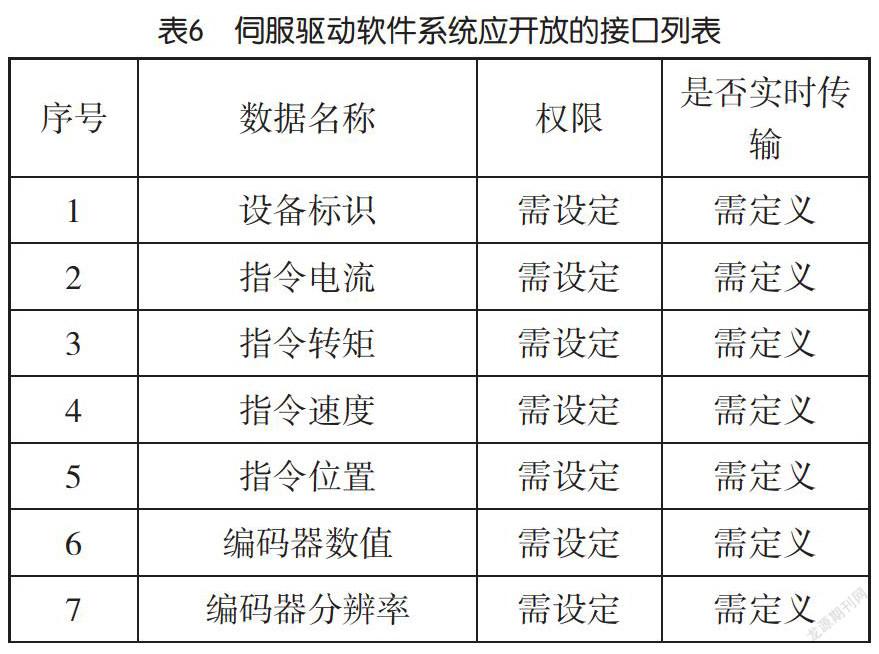
伺服驱动软件系统应具备可扩展性,以便于用户进行柔性扩展相关的开发。因此,伺服驱动软件系统应开放如表6所示的数据传输接口,考虑到工业机器人的安全性,需要对操作权限(可读/可写)以及传输的实时性进行定义。
5 协议及数据开放标准化助力产业发展
目前,开展工业机器人二次集成开发应用的企业所面临的问题就是所需集成的部件由不同厂家提供,在集成过程中,需要根据不同部件产品的软件进行复杂的二次开发,才能与工业机器人进行通信互联,同时在应用过程中,如果需要更换部件产品,则又需要重新进行开发,无形中增加了人力、时间成本,降低了集成应用效率。如果能在应用层等互联层建立标准化的通用通信协议,则在满足硬件机械接口的前提下,可以实时进行集成部件的互换及通信互联,降低应用过程中的人力及时间成本,大幅提高集成应用的效率及效益。
我国工业机器人的本体市场一直由多个国外品牌所主导,企业在做二次集成开发时无法获得所需要的工业机器人本体数据参数、接口函数等信息,导致在运动控制精度、安全特性、功能实现等方面的应用、扩展、维护时间和成本代价高昂,而我国的二次集成开发市场巨大,在这种情况下,如果能够通过对工业机器人柔性控制所需采集数据信息的确定,建立数据开放、控制软件系统接口函数开放、伺服驱动软件系统接口开放的规则,符合规则要求的工业机器人才能在未来定义为符合“柔性控制技术”特性,从而在“柔性控制”特性应用场景下更快更好地推动集成开发应用,突破长久以来国外工业机器人品牌对我国市场的主导局面。
由此可见,未來如果能更多地通过协议的标准化促进集成开发应用中的互联互通,更多地通过数据开放的标准化获取工业机器人特性信息,我国工业机器人和集成开发产业才能够逐步摆脱受限于人的状况,抢占国内外市场以及全球工业机器人和集成开发产业价值链的更高端。
参考文献
[1] 全国自动化系统与集成标准化技术委员会. 机器人与机器 人装备 词汇:GB/T 12643—2013[S].北京:中国标准 出版社, 2013.
[2] 电子工业部标准化研究所. 信息技术 开放系统互连 基 本参考模型:第1部分 基本模型:GB/T 9387.1—1998 [S]. 北京:中国标准出版社, 1998.
猜你喜欢
现代企业(2021年11期)2021-12-08
哈哈画报(2021年10期)2021-02-28
中国计算机报(2019年29期)2019-09-18
科技创新导报(2016年32期)2017-04-22
电子技术与软件工程(2016年22期)2016-12-26
软件导刊(2016年11期)2016-12-22
电脑知识与技术(2016年27期)2016-12-15
中学生数理化·八年级物理人教版(2014年1期)2015-01-09
卷宗(2013年6期)2013-10-21
棋艺(2001年7期)2001-06-14
