
基于S函数的异步电机损耗模型搭建
2019-09-10 07:22王智琦黄同成林立
河南科技 2019年35期
王智琦 黄同成 林 立

摘 要:根据对异步电机合成磁动势与旋转磁场的角度分析,本研究推导出异步电机在两相静止坐标系下的损耗模型,并利用Matlab/Simulink中S函数搭建异步电机损耗模型,最后通过矢量控制验证了该模型的正确性,为异步电机最优控制、损耗最小控制等控制策略奠定了前期研究基础。
关键词:异步电机;S函数;损耗模型
中图分类号:TM343 文献标识码:A 文章编号:1003-5168(2019)35-0040-02
Modeling and Simulation of Loss Model of Asynchronous
Motor Based on S Function
WANG Zhiqi HUANG Tongcheng LIN Li
(Hunan Provincial Key Laboratory of Grids Operation and Control on Multi-Power Sources Area, Shaoyang University,Shaoyang Hunan 422000)
Abstract: According to the angle analysis of the synthetic magnetomotive force and the rotating magnetic field of the asynchronous motor, the loss model of the asynchronous motor in the two-phase static coordinate system was derived in this study, and the loss model of the asynchronous motor was built by S-function in Matlab / Simulink. Finally, the correctness of the model was verified by vector control, which laid the foundation for the early research of the optimal control of the asynchronous motor.
Keywords: asynchronous motor;S-function;loss model
Matlab/Simulink中的異步电机模块为理想数学模型,未考虑到定子铁耗,真实程度较低,同时,用Matlab/Simulink模块搭建的电机模型连线复杂且运算速度较慢。因此,本文使用S-function模块对异步电机损耗模型进行函数建模,通过矢量控制对电机模型的正确性进行验证,得到转矩、转速等波形。该损耗模型可用于损耗最小控制、最优控制等仿真平台中[1]。
1 异步电机损耗模型
异步电机运行时,由于磁滞损耗与涡流损耗的存在,其磁动势与旋转磁场会存在铁耗角[2],该铁耗角会导致按转子磁链定向时,两相旋转坐标系下的励磁电流分解为两个分量,其中与转子磁链同向的分量用于励磁,与转子磁链垂直的分量将用于产生铁耗。将铁耗用铁耗等效电阻代替,可得到考虑定子铁损的异步电机T形等效电路,如图1所示。
图1 考虑定子铁损的异步电机T形等效电路
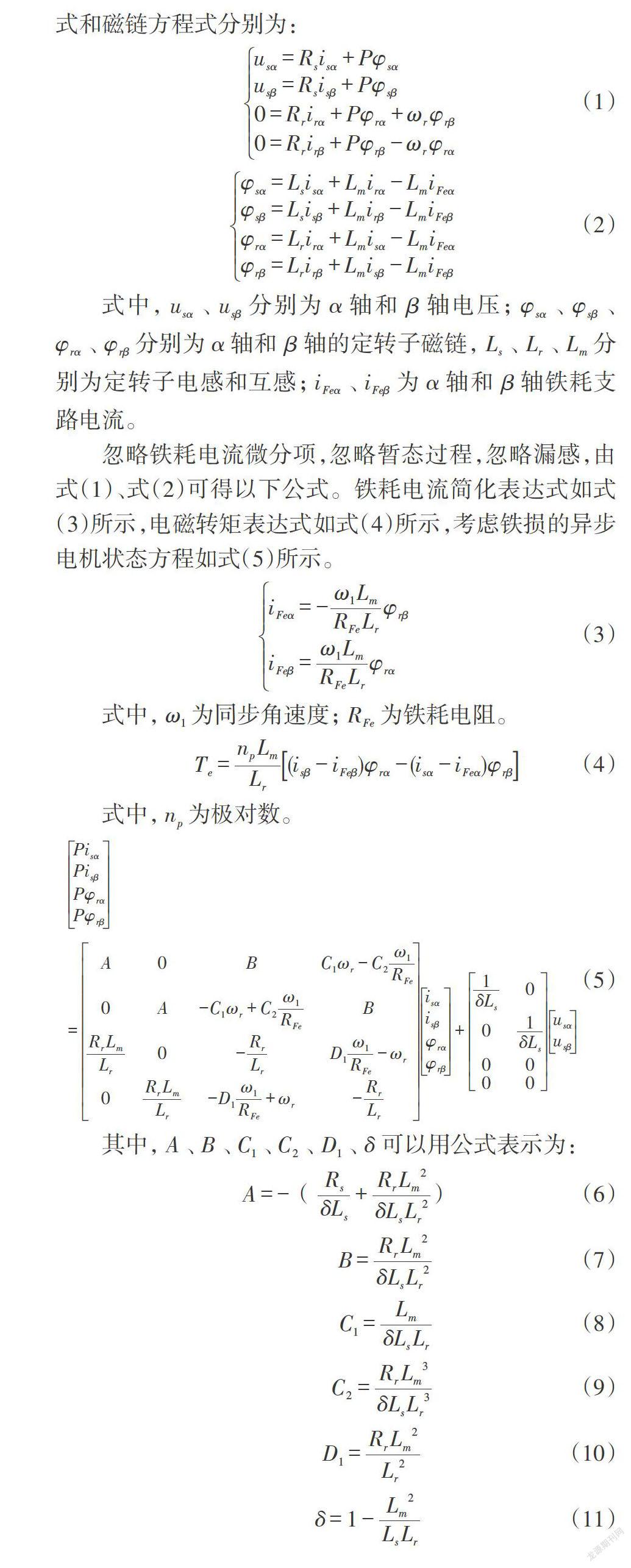
根据图1的异步电机T形等效电路,可得其电压方程式和磁链方程式分别为:
[usα=Rsisα+Pφsαusβ=Rsisβ+Pφsβ0=Rrirα+Pφrα+ωrφrβ0=Rrirβ+Pφrβ-ωrφrα] (1)
[φsα=Lsisα+Lmirα-LmiFeαφsβ=Lsisβ+Lmirβ-LmiFeβφrα=Lrirα+Lmisα-LmiFeαφrβ=Lrirβ+Lmisβ-LmiFeβ] (2)
式中,[usα]、[usβ]分别为[α]轴和[β]轴电压;[φsα]、[φsβ]、[φrα]、[φrβ]分别为[α]轴和[β]轴的定转子磁链,[Ls]、[Lr]、[Lm]分别为定转子电感和互感;[iFeα]、[iFeβ]为[α]轴和[β]轴铁耗支路电流。
忽略铁耗电流微分项,忽略暂态过程,忽略漏感,由式(1)、式(2)可得以下公式。铁耗电流简化表达式如式(3)所示,电磁转矩表达式如式(4)所示,考虑铁损的异步电机状态方程如式(5)所示。
[iFeα=-ω1LmRFeLrφrβiFeβ=ω1LmRFeLrφrα] (3)
式中,[ω1]为同步角速度;[RFe]为铁耗电阻。
[Te=npLmLr(isβ-iFeβ)φrα-(isα-iFeα)φrβ] (4)
式中,[np]为极对数。
[PisαPisβPφrαPφrβ=A0BC1ωr-C2ω1RFe0A-C1ωr+C2ω1RFeBRrLmLr0-RrLrD1ω1RFe-ωr0RrLmLr-D1ω1RFe+ωr-RrLrisαisβφrαφrβ+1δLs001δLs0000usαusβ](5)
其中,[A]、[B]、[C1]、[C2]、[D1]、[δ]可以用公式表示为:
[A=-(RsδLs+RrLm2δLsLr2)] (6)
[B=RrLm2δLsLr2] (7)
[C1=LmδLsLr] (8)
[C2=RrLm3δLsLr3] (9)
[D1=RrLm2Lr2] (10)
[δ=1-Lm2LsLr] (11)
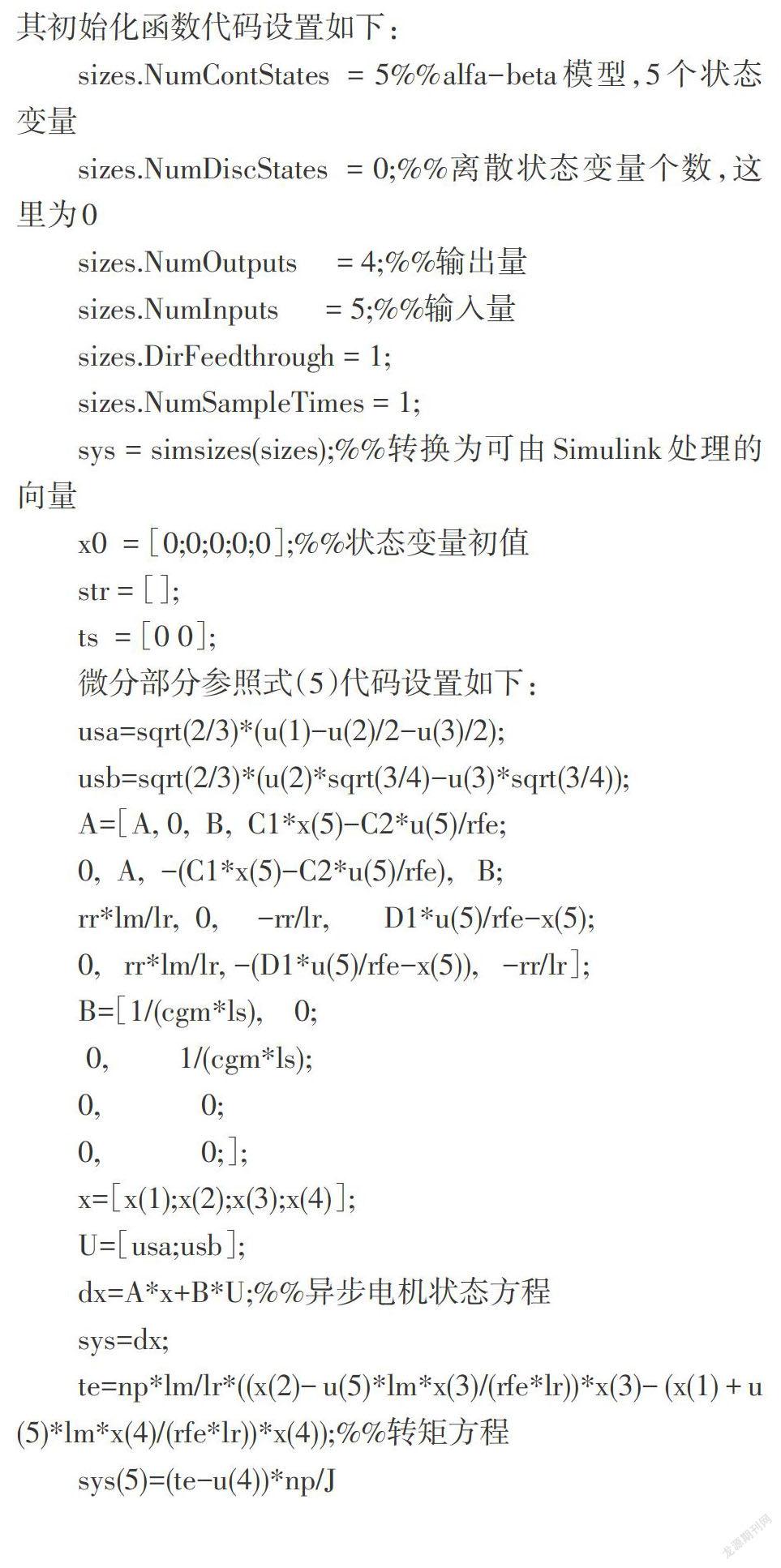
2 S函数建模
S-function模块主函数不需要设置,保持默认即可,其初始化函数代码设置如下:
sizes.NumContStates = 5%%alfa-beta模型,5个状态变量
sizes.NumDiscStates = 0;%%离散状态变量个数,这里为0
sizes.NumOutputs = 4;%%输出量
sizes.NumInputs = 5;%%输入量
sizes.DirFeedthrough = 1;
sizes.NumSampleTimes = 1;
sys = simsizes(sizes);%%轉换为可由Simulink处理的向量
x0 = [0;0;0;0;0];%%状态变量初值
str = [];
ts = [0 0];
微分部分参照式(5)代码设置如下:
usa=sqrt(2/3)*(u(1)-u(2)/2-u(3)/2);
usb=sqrt(2/3)*(u(2)*sqrt(3/4)-u(3)*sqrt(3/4));
A=[A, 0, B, C1*x(5)-C2*u(5)/rfe;
0, A, -(C1*x(5)-C2*u(5)/rfe), B;
rr*lm/lr, 0, -rr/lr, D1*u(5)/rfe-x(5);
0, rr*lm/lr, -(D1*u(5)/rfe-x(5)), -rr/lr];
B=[1/(cgm*ls), 0;
0, 1/(cgm*ls);
0, 0;
0, 0;];
x=[x(1);x(2);x(3);x(4)];
U=[usa;usb];
dx=A*x+B*U;%%异步电机状态方程
sys=dx;
te=np*lm/lr*((x(2)-u(5)*lm*x(3)/(rfe*lr))*x(3)-(x(1)+u(5)*lm*x(4)/(rfe*lr))*x(4));%%转矩方程
sys(5)=(te-u(4))*np/J
3 结论
本文根据异步电机损耗模型的T形等效电路,推导了其在两相静止坐标系下的状态方程,利用S函数对其进行建模,利用异步电机矢量控制策略对其进行仿真,电磁转矩、转速和三相电流波形表明,考虑铁损的电机模型的动态、稳态性能均正常。
参考文献:
[1]李耀恒,刁利军.感应电机考虑铁耗的并联模型及对矢量控制的影响[J].电工电能新技术,2016(1):13-18.
[2]辜承林,陈乔夫,熊永前,等.电机学[M].武汉:华中科技大学出版社,2010.
