
一种三角履带式平板车设计
2019-09-10 07:22吴荣燎乐咏琪王文涛俞志文
河南科技 2019年35期
吴荣燎 乐咏琪 王文涛 俞志文


摘 要:当前常用的手扶平板车没有护栏和减震装置,在遇到不平路面时,平板车上的物品常常会被颠簸下来。针对这种情况,设计了一种履带式平板车,并对其受力、功率、性能等进行分析。研究表明,履带式平板车相对于普通平板车减震性、通过性更好,实用性更高。
关键词:平板车;履带式;通过性;减震
中图分类号:TH122 文献标识码:A 文章编号:1003-5168(2019)35-0073-03
The Invention Relates to the Design of a Triangular Crawler Flatbed Vehicle
WU Rongliao LE Yongqi WANG Wentao YU Zhiwen
(School of Mechanical and Electrical Engineering and Automation, Nanhang Jincheng College,Nanjing Jiangsu 210000)
Abstract: At present, due to the lack of guardrail and shock absorption device, the objects on the flat car are often bumped down when encountering uneven road surface. In view of this situation, a kind of crawler flat car was designed, and its force, power and performance were analyzed. The research shows that the crawler flat car has better shock absorption, trafficability and practicability than the ordinary flat car.
Keywords: flat car;caterpillar;through sexual;shock absorption
1 设计背景
当前,学校里,部分学生会拖着一辆平板车拉书、饮料或者其他商品;工厂里,一些货品被堆放在平板车上从一个车间拉到另一个车间。如图1所示,平板车被大量运用到人们的生活中,但由于没有护栏,会出现物品因颠簸和震动而散落在地上的情况,人员在搬运过程中必须要捡起物品和重新堆放,浪费了大量时间和精力,且事倍功半。此外,在地形稍微复杂一点的路面上,这种普通的平板车就很难顺畅通过,复杂的地形势必将导致平板车震动加大,并使拉车吃力。针对上述种种问题,本文设计了一种三角履带式平板拖车。
2 履带式平板车的结构设计
履带式平板车主要由框架和承载板部分、电机和驱动部分、三角履带和轮子部分组成。
2.1 框架和承载板设计
由于此方案设计为电动平板车,扶手部分只需要在电池没电或者电机电路故障等紧急情况下才会由人去操控,所以,扶手部分不需要太复杂,本方案采用最简洁的“T”字形扶手、壁厚1.5mm的方管。与圆管相比,方管有较大的惯性矩和截面模数,有较大的抗弯、抗扭能力,从结构来说更加优秀,能减轻自身重力和节省钢材。扶手部分还在平板车急加速时充当辅助挡板,防止物品散落。承载板选用实心板材,以保证能承受较大的货品重量。
圖1 普通平板车
2.2 电机和驱动设计
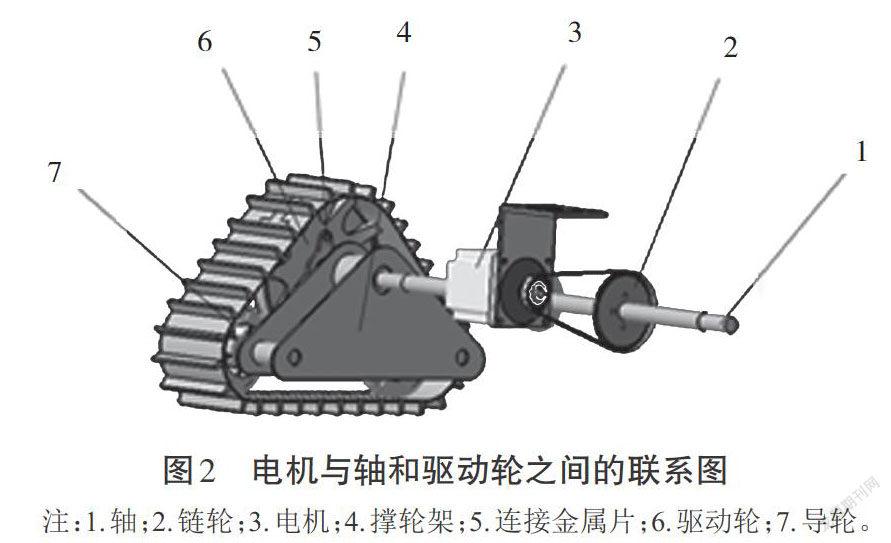
本设计初选500W电机,通过链盘链轮连接电机和后轴,后轴贯通三角履带撑轮架,轴端焊有一块5mm的钢板与履带驱动轮螺栓连接,实现从电机到驱动轮的传动功能。撑轮架是在履带的驱动轮、导轮之间起到限位和固定作用。图2是电机与轴和驱动轮之间的联系图。
图2 电机与轴和驱动轮之间的联系图
注:1.轴;2.链轮;3.电机;4.撑轮架;5.连接金属片;6.驱动轮;7.导轮。
2.3 三角履带和轮子设计
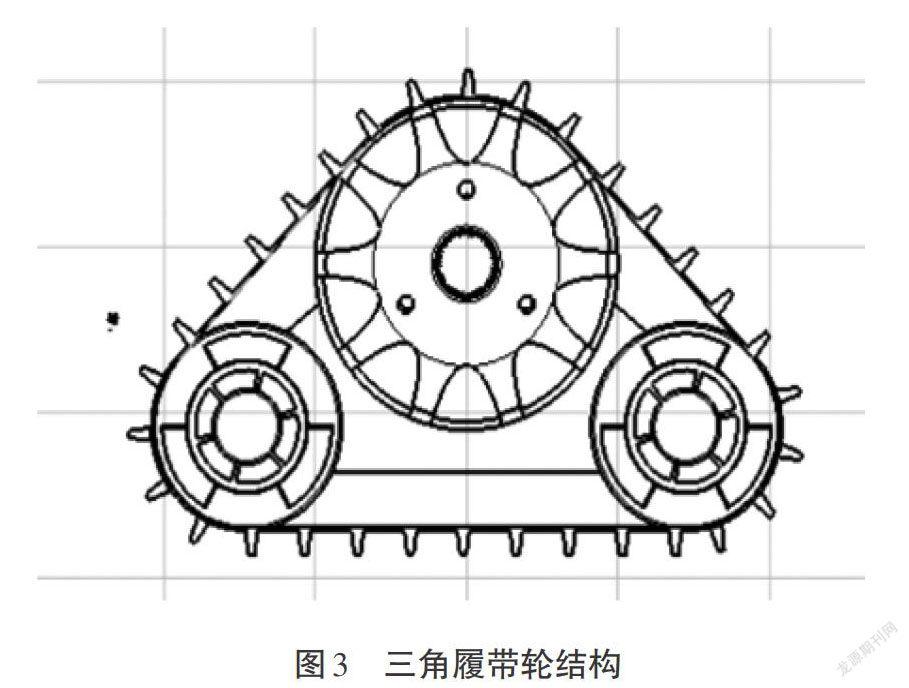
三角履带轮式行走系统由1个驱动轮和2个导轮组成,3个轮子被固定在撑轮架上。其中,驱动轮带动整个结构运动。现有手推式平板车的轮胎直径多127~203.2mm,为保证车辆安全行驶,选择驱动轮直径为200mm。导向轮负责引导履带运动,防止发生脱轨,其直径选择125mm。考虑到车辆行驶过程中履带会发生不同程度的松紧变化,因此,设计了驱动轮与导轮圆心距离为175mm,2个导轮圆心距离为290mm的等腰三角形撑轮架[1]。结合整车尺寸,并考虑减小对土壤破坏的要求,选择宽度为57.5mm的橡胶履带。三角履带轮结构如图3所示。
图3 三角履带轮结构
3 三角履带轮参数设计和渲染
3.1 驱动轮受力分析
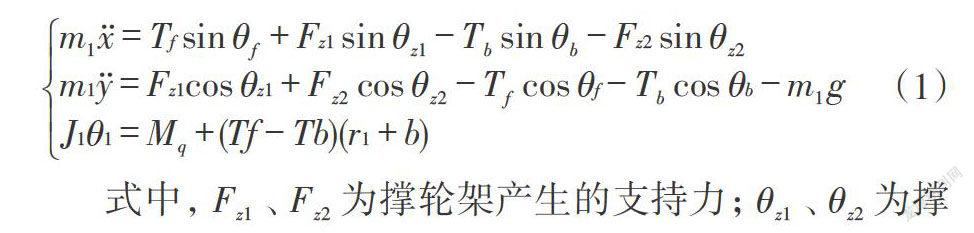
驱动轮主要受重力和撑轮架形成三角结构的支持力,同时受履带的阻力以及后轴对驱动轮的驱动力矩。主动轮与主动轮上的履带一起受到履带张紧力的作用而转动,将受力按水平方向和竖直方向分解,根据牛顿欧拉公式可以得到主动轮的受力分析结果,如式(1)所示。为了减少主动轮的振动,一般主动轮的旋转中心、质心与圆心重合[2]。受力分析如图4所示。
[m1x=Tfsinθf+Fz1sinθz1-Tbsinθb-Fz2sinθz2m1y=Fz1cosθz1+Fz2cosθz2-Tfcosθf-Tbcosθb-m1gJ1θ1=Mq+(Tf-Tb)(r1+b)] (1)
式中,[Fz1]、[Fz2]为撑轮架产生的支持力;[θz1]、[θz2]为撑轮架作用力与中心线的夹角;[Tf]、[Tb]为前进方向和后面履带产生的张紧力;[θf]、[θb]为张紧力与中心线的夹角;[m1]为主动轮和其上履带的质量;[b]为履带的厚度;[r1]为主动轮的半径;[Mq]为驱动力矩;[J1]为主动轮及轮上履带的转动惯量。
图4 驱动轮受力分析
3.2 电机功率确定
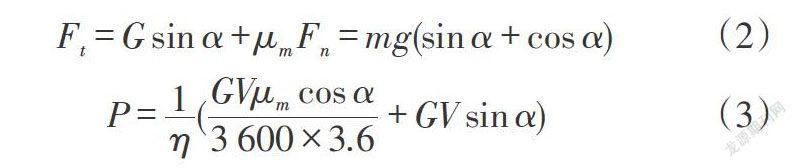
在设计时,考虑到路面不平整和复杂的地形,将折算成爬坡能力计算电机功率,因此在不考虑空气阻力的情况下,平板车以额定速度10km/h计算。
[Ft=Gsinα+μmFn=mg(sinα+cosα)] (2)
[P=1η(GVμmcosα3 600×3.6+GVsinα)] (3)
式中,[P]为发动机功率;[G]为平板车和额定货物总重力;m为平板车和额定货物总质量,取100kg;g为重力加速度;[V]为行驶速度;[μ]为运行阻力系数,取0.18;[η]为传动效率,取0.9;[α]为坡度,取10°。
由式(2)和式(3)算的功率为540W,修正初定电机500W的参数,确定电机额定功率为600W。
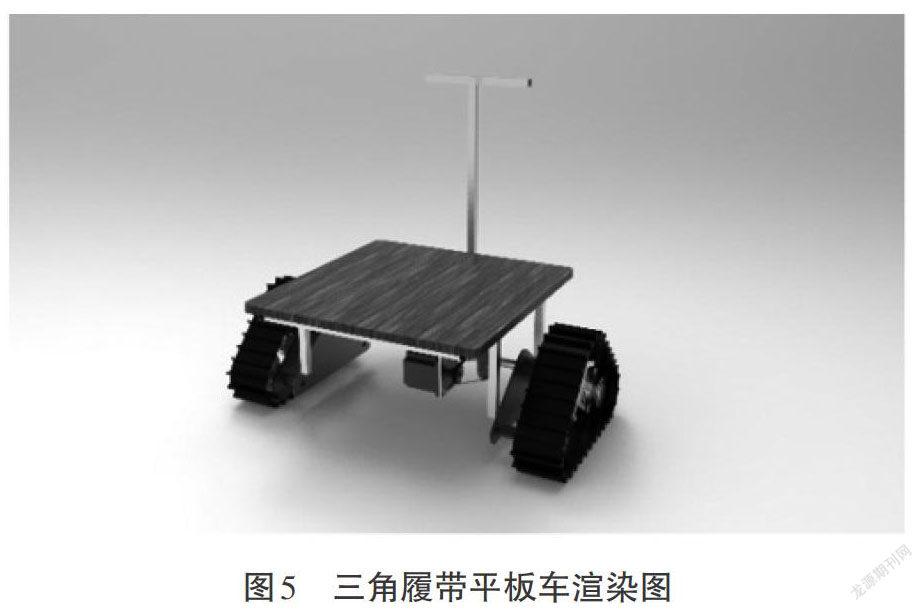
3.3 三角履带平板车的渲染
通过上述主要零件的设计、确定、各种参数的计算和校核,最终用CATIA画出三角履带平板拖车的整体,并用渲染软件KeyShot进行渲染,最终得到渲染图,如图5所示。
图5 三角履带平板车渲染图
4 三角履带轮平板车与普通平板车的对比
轮式移动平板车的行走机构以车轮为主体。轮式移动平板车的机械结构最为简单,驱动及控制的设计比较方便,承载量大,移动速度快,运动效率高,比较灵活,自重较轻。轮式移动平板车的缺点是运动稳定性受路面情况影响很大,很难通过复杂路面[3]。三角履带式平板车的突出优势为:①有较大支撑面积,接地比压小,能在松软甚至泥泞的场地作业,下陷度小,越野机动性能很好;②转向半径非常小,可原地转向;③履带支撑面上有履齿,附着性能好,能有效避免打滑,且能够提供较大的牵引力;④承载能力大[4]。
4.1 减震性对比
由于履带与地面接触面积大,附着度高,因此履带式平板车有着先天的通过优势。普通平板车的轮子与地面为线接触,有的甚至是点接触,这在遇到路障时由于惯性作用势必会造成颠簸。而三角履带轮因履带会先接触障碍物,履带的柔性会吸收一部分的冲击力,形成一次缓冲;在导轮通过路障后,履带完全附着在路障上,使得路障就变成原先行驶路面的一部分,再一次减小了冲击效果,达到完美的减震作用。
4.2 重心对比
普通平板车质量分布較为均匀,所以重心点较高,在满载情况下重心上移,变得更加不稳。三角履带式平板车由于电机、履带、轮子、刚性轴等重物均在载货板的下端,重心必然更加贴近地面,在满载状态下重心上移高过载货板,但总体还是接近载货板,重心比普通平板车低,意味着稳定性比普通平板车好。重心的不同对坡道行驶影响较大。在相同的载荷横向行驶时,由于重力沿坡道向下的分力,极限坡度会随质心高度增大而降低[5]。同时,由于普通平板车的轮子是万向轮,因此,在坡道上横向行驶会更加困难。
5 结语
本文设计了一种三角履带式平板车,对其结构、驱动轮受力、电机功率选配等多方面进行分析,并用CATIA软件进行三维建模,完成渲染,最后,与普通平板车对比。研究表明,所设计的平板车能克服传统平板车震动大、易掉货、通过性差、费时费力的缺点。
参考文献:
[1]张广晖,许明贤,孟庆凯,等.三角履带轮式森林消防车设计与分析[J].消防科学与技术,2019(7):983-987.
[2]王天昊.三角履带轮减震系统动力学建模与分析[D].哈尔滨:哈尔滨工业大学,2017.
[3]张珍珍.轮式移动机器人研究综述[J].电子技术与软件工程,2016(23):120
[4]Ferreira E, Shu-jentsai, Paredis C J, et al. Control of the Gyrover:a single -wheel gyroscopically stabilized robot [J]. Advanced Robotics,2000(6):459-475.
[5]苏锦荣.基于履带式底盘的改进型森林消防车通过性研究[J].轻工科技,2019(9):53-54.
