
基于脸部特征分析的无人机跟拍系统
2019-09-12 10:41顾佳欣郝禹哲苏婷婷皇甫萍萍段淇超
智能计算机与应用 2019年4期
关键词:人脸识别
顾佳欣 郝禹哲 苏婷婷 皇甫萍萍 段淇超


摘 要:目前四旋翼無人机的应用十分广泛,可用于新闻拍摄和高空拍摄。通过对人脸部进行特征分析,可以做到低空下的人脸识别和跟拍。本文针对动态人脸目标,采用Haar特征提取,其优势在于量化了人脸特征,可以较为容易地区分出人脸区域和非人脸区域,即使存在一定干扰如佩戴脸部饰品、帽子等情况下,也具有较好的识别准确度,因此本系统具有一定的应用价值。
关键词:四旋翼无人机;人脸识别;PID算法
文章编号:2095-2163(2019)04-0326-02 中图分类号:TP391.41 文献标志码:A
0 引 言
早期的无人机研究集中在四旋翼无人机的姿态控制方面,随着科学技术的发展,人们渐渐开始把无人机与其它领域联系起来,尤其是将摄像头安装在无人机上,用来实时捕捉图像完成一定的摄像需求。而后的发展中利用不同图像的不同特征进行图像识别研究,增加无人机的实用性。通过识别目标物的某些特征对摄像头捕捉到的图像进行识别,并对运动的物体进行跟踪。所以无人机跟踪系统研究具有一定的研究意义和实用价值。本文利用脸部特征分析进行无人机的跟踪和拍摄,可以较好地应用于新闻摄影、严酷环境下的自动追踪拍摄。通过使用不同的特征和参数,可以实现对于不同物体的跟踪和拍摄,可应用于生物学追踪、观测等领域。
1 人脸检测
典型的人脸识别模型就是Haar特征模型。Haar特征分为3类,如图1所示。
Haar特征有边缘特征、线性特征、中心特征和对角线特征。这些基础特征组合成为特征模型。由图1所示的特征模板可见,模板由白色和黑色2种矩形组成。Haar特征本身并不复杂,就是把上面的任意一种矩形遍历含有人脸的图像,而特征值就是将图中所有的黑色矩形像素和减去白色矩形像素和所得到的值[3],因此得到的人脸特征值和非人脸特征值是不同的。另外,人脸部一些特征可由矩形特征简单的描述。如人的眼睛要比脸颊的颜色要深,而鼻梁两侧比鼻梁颜色要深,嘴巴比周围颜色要深等。这些都可以由简单的矩形特征来表示。所以Haar特征最简单的目的就是量化人脸特征,从而进行简单的区分人脸区域和非人脸区域。
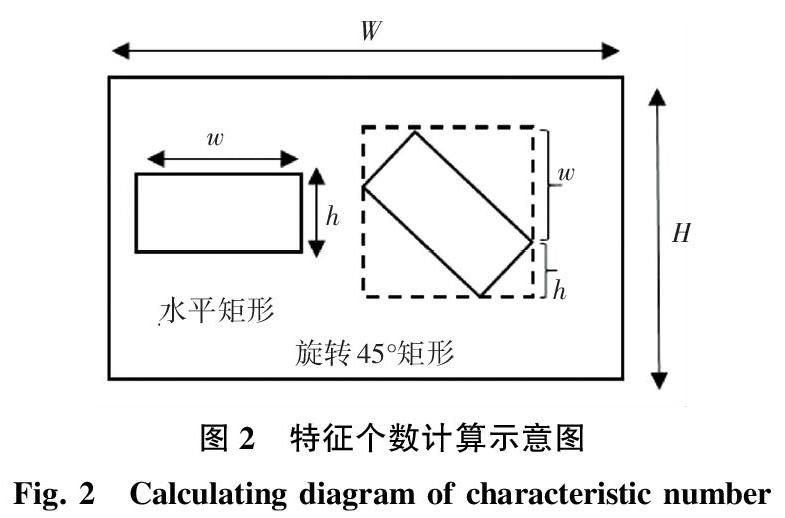
2 计算特征个数
具体识别人脸的方式简而言之就是将某个Haar特征矩形对整个图像遍历一遍,得到所有的特征值。通过积分图的方法计算Haar特征,并用这些特征值进行判断是否为人脸特征。而如何计算这些特征的数量如图2所示。例如,特征矩形大小为2×1,图片大小为12×12。那么对于2×1这个Haar特征,可以水平移动11次,垂直移动12次。遍历整个图像后可以得到11×12=132个特征值。同时为了检测结果的准确性,对于同一个特征,可以沿着水平或竖直方向进行伸缩。就如同刚才的特征2×1,可以进行水平放大变成4×1,也可以进行竖直放大变成2×2等等。
3 实验测试
本文是基于复杂环境对人脸进行了动态的识别。经测试在戴帽子、遮住嘴巴、遮住半张脸、距离超过2 m等情况下皆能成功检测出人脸,结果如图3所示。
通过返还特征值的坐标来对目标进行跟踪及飞行器的姿态调整。将识别框的面积与图像面积做比得到一个面积占比,通过与阈值相比进行一个大致的水平复杂环境下的测距。通过返还的水平距离来控制飞行器不至于靠近或远离目标。如图4所示。
4 结束语
本文主要实现低空拍摄时基于人脸特征识别的自动跟拍系统,并且可以适应人体小角度或缓慢转体情况下的拍摄角度调整,亦可使用手动控制实现实时调整。可以取代当下手持式摄影机,避免画面抖动的同时可以更好地突破地面条件对摄影人员的移动限制,达到更大的拍摄自由度。
参考文献
[1]李倩玉, 蒋建国, 齐美彬. 基于改进深层网络的人脸识别算法[J]. 电子学报, 2017, 45(3):619-625.
[2]姜俊俊, 李明, 张宇. 基于视觉的四旋翼无人机目标跟踪系统设计[J]. 中国科技信息, 2016(14):65-66.
[3]李永健. 基于机器视觉的四旋冀无人机定点着陆系统设计与实现[D]. 广州:华南理工大学,2015.
[4]龙云露, 陈洋, 滕雄. 四旋翼飞行器姿态解算与滤波[J]. 计算机测量与控制, 2016, 24(10):194-197,201.
[5]李航, 王耀力. 四旋翼飞行器中PID控制的优化[J]. 电子技术应用, 2017, 43(2):73-76.
猜你喜欢
文萃报·周五版(2021年17期)2021-05-31
中国计算机报(2021年10期)2021-04-27
科学与财富(2020年29期)2020-12-21
中国计算机报(2020年13期)2020-04-26
作文周刊(中考版)(2020年32期)2020-01-22
北京广播电视报(2019年16期)2019-05-11
通信产业报(2018年10期)2018-04-13
小康(2017年28期)2017-10-13
三联生活周刊(2017年38期)2017-09-19
环球时报(2017-09-14)2017-09-14
