四足机器人研究综述
2019-09-13 08:40杨钧杰王常虹陈晓东
导航定位与授时 2019年5期
杨钧杰, 孙 浩, 王常虹, 陈晓东
(1.哈尔滨工业大学, 哈尔滨 150001; 2.上海机电工程研究所,上海 201109)
0 引言
随着社会的进步和科技的发展,机器人的应用领域逐渐扩大,而人们对机器人的功能需求也越来越高。对于机器人来说,可以分为移动机器人和非移动机器人。移动机器人又可以分为轮式机器人、履带式机器人和足式机器人[1]。以往的研究表明,轮式车辆在相对平坦的地形上行驶时,具有控制简单、运动平稳快速的特点[2],但在松软地面或崎岖不平的地形上行驶时,车轮的移动效率大大降低甚至无法移动,而足式机器人可以在非结构化和恶劣的环境中工作[3]。一般来说,四足机器人的驱动方式主要分为三类:液压执行机构、气动执行机构和电动执行机构[4]。电动执行器控制精度高,但可承担的负载较小;气动执行机构由于其非线性特性而难以控制;液压执行器由于其动力强劲得到了广泛的应用。由于四足机器人可以适应复杂的环境,因此四足机器人的应用场景广泛,但目前四足机器人发展还不够完善,大多数四足机器人还停留在实验室研究和演示阶段,因此四足机器人的应用都是潜在的,本文列出了以下几种:
第一种为野外环境下的运输工具。在野外环境下,现有的人造陆地运输工具都难以应用,大多需要人力和畜力等传统运输方式。而四足机器人能够在复杂的野外环境下灵活运动,并可以承担大量负载,因此四足机器人可以作为一种潜在的运输工具帮助人类完成野外的运输任务。
第二种为危险环境下的侦查工具[5]。在危险的环境中,如地震灾区和战场,存在很多需要探索但人力难以到达的区域。四足动物有着比人类更强大的运动能力,所以四足机器人有着潜在的帮助人类探索复杂危险的未知环境的能力。针对不同的任务机器人可以搭载不同的传感器,在灾区救援中四足机器人可以帮助人类发现幸存人员;在战场上四足机器人可以帮助士兵完成预探索任务,减少人员伤亡。
第三种为服务型四足机器人。四足机器人可以完成四足动物(如猫、狗等)的行为,如导盲和作为宠物等,却省去了吃饭睡觉等普通动物必不可少的行为,并且无需长时间的人为训练。因此四足机器人可以作为潜在的服务型机器人,相比于普通的四足动物有着方便、洁净等优势。
四足机器人的发展也伴随着一些新思路。例如将机器人模块化使得机器人具有可重构性[6],可变形态的轮足复合式机器人[7],将机器人整个身体变形为一个球体实现滚动等[8]。
1 四足机器人发展及研究现状
自20世纪90年代起,由于电子计算机技术和仿生学技术的飞速发展,四足机器人也进入了高速发展阶段[9]。涌现了一批可以通过控制算法实现各种运动步态并能够完成简单任务的四足机器人。由Kimura等建造的Tekken IV,使用中央模式发生器(Central Pattern Generator,CPG)来控制腿的运动,并可以用多种步态行走。2007年,尚昆湾大学研制出了AIDIN I四足机器人,能够爬过斜坡,避免了机器人的翻滚和滑倒。在2013年他们还研制了AIDIN III四足机器人,速度可达0.35m/s,可以用小跑的步态爬上20°的斜坡,且载荷可达3kg。
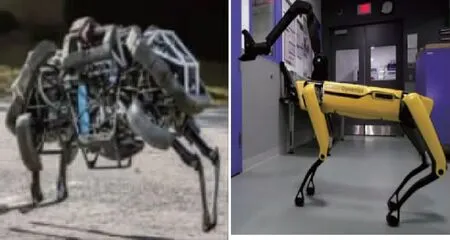
随着四足机器人的发展和近年来人工智能的兴起,使得机器人拥有自主性和智能性已经成为四足机器人研究的重要组成部分,四足机器人逐渐拥有了感知环境、自主规划和与环境交互的能力,研究者也更多地着眼于提高机器人的自主适应性和功能性。以波士顿动力公司最具代表性的产品Big Dog为例,Big Dog拥有强大的负载能力,设计初衷是在战场上帮助士兵运送物资。Big Dog长度约为1.1m,质量为20kg,是世界上第一款真正实现了野外行走的机器人,其强大的环境适应能力使得该机器人可以在山地和雪地自如行走。更为值得一提的是Big Dog的平衡能力,在冰面上受到巨大的侧向冲击时,机器人可以凭借卓越的平衡能力最终实现稳定站立。Big Dog可以以4km/h的速度连续运行10km。
波士顿动力公司又陆续推出了几代产品,2012年发布的Cheetah猎豹仿生四足机器人是目前室内奔跑速度最快的机器人,在跑步机上可以达到45km/h的速度。2013年推出的WildCat野猫四足仿生机器人可以在各种步态下灵活转弯,且目前只有波士顿动力公司能够实现在奔跑步态时的转弯,是室外奔跑速度最快的四足机器人,同时还具有较高的能量效率。而2016年推出的SpotMini四足仿生机器人体型小巧,质量仅约30kg,在崎岖的地形下比大型的四足机器人更灵活。
波士顿动力各系列仿生四足机器人如图1所示。

(a) Big Dog (b)Cheetah
(c) Wild Cat (d) SpotMini图1 波士顿动力各系列仿生四足Fig.1 Boston dynamics various bionic quadruped robots
针对四足机器人的奔跑和跳跃能力,麻省理工学院(Massachusetts Institute of Technology,MIT)研制了三代Cheetah猎豹机器人。第一代猎豹机器人可以实现高速奔跑,通过4个设计原则最小化能量损失,运输成本为0.51[10];而第二代猎豹机器人奔跑速度更快并可以在奔跑的同时跨越45cm高度的障碍物;第三代猎豹机器人可以实现不依赖视觉系统,通过触觉信息敏捷地感觉周围环境的方式来进行运动,称之为盲目运动,拥有在快速移动时准确处理障碍物的能力。第三代猎豹机器人还拥有很强的平衡能力,可以在一条腿不动的情况下完成三条腿的前进,并且有着极强的跳跃能力,可以原地跳跃至高度超过自己体长的桌面[11]。近期MIT又推出了最新的迷你猎豹,首次实现了四足机器人的后空翻动作。
MIT各系列仿生四足机器人如图2所示。

(a)第一代Cheetah

(b)第二代Cheetah

(c)第三代Cheetah图2 MIT各系列仿生四足Fig.2 MIT various bionic quadruped robots
HyQ是由意大利工业技术研究所(Italian Institute of Technology,IIT)研制的仿生四足移动机器人,不同于Big Dog技术上采取保密措施,HyQ是首个完全公开研究方法和设计资料的通用研究平台[12]。HyQ长为1.0m、高为0.98m、质量为95kg,速度可达3~4m/s,续航时间不低于8h。2015年该研究所又推出了新一代HyQ2Max机器人[13]。
StarlETH柔性四足机器人是瑞士苏黎世联邦理工学院研制的一款高效节能的四足仿生机器人。受到自然界生物系统的启发,StarlETH能够通过在关节处的大量柔顺机构获得自然动力,允许临时能量存储,提高了机器人的被动适应性[14],使其具有较高的运动速度和强大的机动能力。基于这种设计,机器人总体功耗很低,具有很高的能量效率。苏黎世联邦理工学院随后又发布了ANYmal四足机器人,该机器人继承了StarlETH机器人的优点,质量约30kg,全速运行功率低于280W,可以在自主条件下运行2h以上,并具有攀爬陡峭楼梯的能力。ANYmal机器人如图3所示。

图3 ANYmal四足机器人Fig.3 ANYmal quadruped robot
国内的四足机器人研究起步较晚,处于模仿和追赶的阶段,但仍然有一些突出的成果。较有代表性的是宇树科技开发的四足机器人莱卡狗。该机器人质量为22kg,自主研发的电机系统能输出18kW的瞬时功率,该机器人可在脱离外部供电的情况下运行2~3h,如图4所示。莱卡狗的性能与波士顿动力公司的SpotMini差距不大,但还不够成熟,视觉导航及自主性仍有待提高。浙江大学团队发布的机器人绝影和赤兔是高校领域的代表。赤兔采用电机驱动,奔跑速度可达10km/h。山东大学、北京理工大学和哈尔滨工业大学等高校在四足机器人领域也都取得了较好的成绩。国内的四足机器人研发愈来愈热,但仍与世界先进水平有一定的差距,主要体现在仿生结构、驱动系统的性能指标和自主性不足方面。机器人关节的驱动器在较大程度上依赖于国外,而绝大多数国内研发的四足机器人仍处于实验室研发阶段,达不到波士顿动力公司的系列机器人可以在野外长时间工作的水准,但这些成果仍然大大推动了国内在该领域技术的发展。近年来,国内的电机产业也有了突破性进展,银弗科技发布的QDD系列电机是其中的代表,该系列电机的运行参数可以与一些世界一流的电机厂商相比,虽然还没有被大规模使用,但仍然体现出了机器人产业带动相应产业的高速发展。

图4 宇树科技发布的莱卡狗机器人Fig.4 Laikago robot released by Yushu Technology
2 四足机器人仿生结构
四足机器人是一种仿生机器人,仿生结构的设计是关键。目前对四足动物仿生学研究比较广泛的是德国牧羊犬,也有基于猎豹的如MIT的猎豹系列仿生机器人,Ishii等还研制了基于小鼠的仿生机器人[15]。在研究时对其骨骼构造进行了分解研究,如图5所示,可简单地把腿部分为前后结构。四足生物的腿部一般包括髋、膝和踝3个关节。在行走过程中髋关节实现前后的摆动和侧摆调整方向,因此在结构上应该包括2个自由度;膝关节可简化为1个自由度的前后摆动[16];踝关节和膝关节一样为1个自由度的前后摆动,也可以将踝关节视为被动的弹性关节。腿部的这些自由度使得四足动物可以在复杂的环境下灵活运动和高速奔跑。
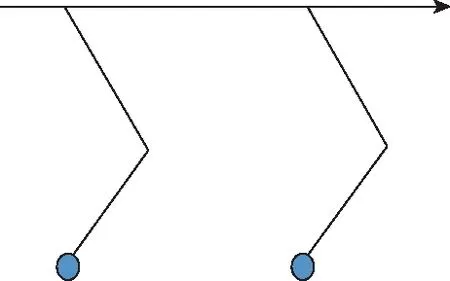
四足仿生机器人要像真实四足动物一样行走,首先要确定腿部关节的活动范围。对此可以参考四足动物的生理结构特征,髋关节的活动范围可以达到50°~162°,膝关节的活动范围可以达到41°~162°[17]。德国牧羊犬的腿部关节活动范围示意图如图6所示。
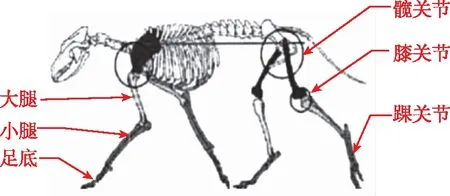
图5 四足动物骨骼结构图Fig.5 Quadruped skeleton structure

(a) 髋关节活动范围
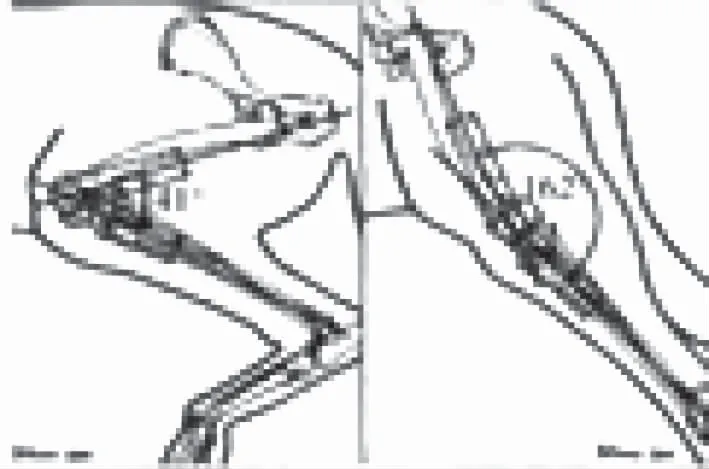
(b) 膝关节活动范围图6 四足动物腿部结构图Fig.6 Quadruped leg structure
2.1 身体支架机构设计
四足机器人身体设计主要是腰部结构的设计,腰部形式可划分为主动腰部、被动腰部和刚性腰部三种。尾部在机器人运动中也具有重要作用[18-19],但相关研究较少。
主动腰部:即在四足机器人的腰部安装驱动器,增加自由度,从而提高四足机器人的灵活性和可控性,但也会大大提高机器人的控制难度,同时也会增加机器人的自身质量。
被动腰部:即在四足机器人的腰部安装被动弹性元件,从而减小机器人奔跑或跳跃时的振动与冲击,同时也略微增大了机器人的活动能力[20]。腰部弹性元件的收缩和舒张可以临时存储和释放能量,提升机器人的能量效率,但也会给机器人带来额外的扰动,增加机器人的控制难度。
刚性腰部:即前后身之间为刚性连接,相较于另外两种形式,结构简单,控制难度低,成本低。
2.2 仿生四足腿部机构设计
2.2.1 腿部关节设计
四足机器人的腿部关节也分为髋关节、膝关节和踝关节。一般来讲,每一个自由度对应一个执行器,一般是旋转关节执行器,Byeonghun等也实现了线性执行器的案例[21]。但对于真实的动物,一个关节可以对应多个自由度,所以应用新型执行机构,尤其是大力矩多自由度的执行器,才能使四足机器人真正地仿生四足动物。
四足动物的髋关节拥有2个自由度,为左右横跨和前后摆动,左右横跨的自由度会给机器人带来额外的扰动,使得机器人更难控制,同时也增加了机器人机械结构设计的难度。所以MIT猎豹机器人系列的第一代和第二代都没有加入左右横跨的自由度,目的是让机器人具有更快的奔跑速度。但若想让机器人像真正的四足动物那样灵活运动,髋关节的横跨自由度是不可或缺的。
膝关节拥有前后摆动的自由度,而膝关节相对于腿部转动轴较远,因此膝关节的质量会很大程度上影响整条腿的转动惯量,若腿部的转动惯量过大,则不利于腿部的高速运动。针对这个问题,值得一提的是MIT的猎豹系列机器人。猎豹系列机器人采用创新的关节设计[22],将驱动电机全部设置在髋关节处,采用连杆传动的方式实现膝关节的运动。这种设计方式有效地减少了机器人腿部的转动惯量,因此猎豹系列机器人可以高速奔跑,同时这种设计还为机器人的动力学建模及控制算法的设计提供了便利。
踝关节拥有类似于髋关节的2个自由度,但由于踝关节在动物行走时的主要作用是调节足端与地面的接触,基本不提供动力,因此在设计四足机器人时一般将踝关节设计为被动的弹性关节。
2.2.2 四足腿部关节配置形式
四足机器人腿部关节配置形式有四种:全膝式、全肘式、外膝肘式和内膝肘式。这些关节配置形式都能够成功实现行走,且各有优点。外膝肘式和内膝肘式配置的支撑面比较大,机器人的稳定性比较好;全膝式和全肘式配置由于具有统一的关节形式,控制相对简单。
四足腿部关节各配置形式如图7所示。
(a)全膝式

(b)全肘式

(c)外膝肘式

(d)内膝肘式图7 四足腿部关节配置图Fig.7 Quadruped leg joint configuration structure
2.3 仿生四足足端设计
四足机器人的足端设计主要有三种形式,即圆柱形足端(含半圆柱形足端)、球形足端(含半球形足端)及仿生足端。圆柱形足端(或半圆柱形)就是四足机器人的足端呈横向的圆柱或半圆柱形,与地面接触时是一个矩形平面。圆形足端是目前四足机器人最常见的足端设计,足端呈球形或半球形,这种设计的优点是机器人足端可以和地面从各个方向接触,具有较强的环境适应性。而真正的四足动物足端是不规则的,有爪子和肉垫等结构,与地面接触时始终都有很强的抓地力。而目前仿生足端的研究尚不够充分,真正仿生的足端也并没有在四足机器人上应用,因此仿生足端的设计是未来四足机器人研究的一个难点。
足端的材料一般选用具有弹性的橡胶和海绵等,但传统的材料很难同时实现摩擦系数大、减震能力强和柔性强等需求,因此将新材料应用于四足机器人足端的设计会使得机器人拥有更强的环境适应能力。而一些特殊的材料,如仿生壁虎足底材料的应用,还将使得四足机器人能够在更复杂的环境中运动。
2.4 机器人主要驱动硬件结构
机器人的主要驱动硬件结构包括主处理器、电控系统和关节驱动器。
主处理器的作用是完成机器人的步态规划、环境感知以及定位导航等,是机器人的大脑。主处理器需要读取机器人搭载的各类传感器,如视觉传感器、关节编码器数据、关节扭矩等信息,融合信息完成机器人的步态规划和路径规划,并将规划信息发送给机器人的关节驱动器,使得机器人可以稳定地行走并躲避障碍。对于简单的机器人,可以使用单片机、现场可编程门阵列(Field Programmable Gate Array,FPGA)等小型处理器;而对于大型的复杂的四足机器人,则需要高速的可以搭载操作系统的处理器,例如Intel系列处理器。
电控系统的作用是提供机器人各个部件所需要的能源。合理设计的电控系统可以保证机器人长时间安全运行。
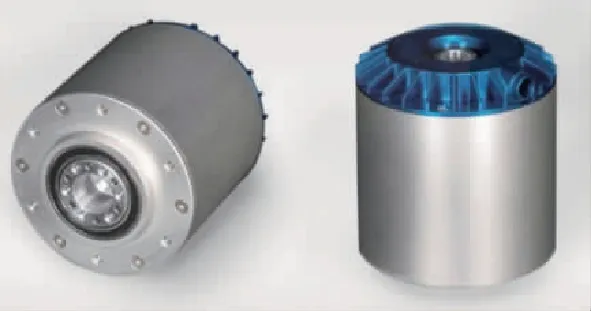
图8 减速箱及执行电机Fig.8 Gear reducer and execution motor
关节驱动器和执行部件是使机器人得以运动的关键部分,是机器人的肌肉。为了使机器人的运动关节输出足够的扭矩,在执行器与关节之间要增加减速齿轮箱,将高速低扭矩的执行器(如电机)输出转化为低速大扭矩的关节输出。减速齿轮箱应尽量保证低减速比,以减少能量损耗和输出精度,执行器和减速箱整体的设计体积应尽量小,例如ANYmal机器人的减速箱和执行电机如图8所示。当关节驱动器得到主处理器的运动信息,为保证高精度低延迟地驱动执行部件,则执行部件的性能十分重要,而执行部件的设计关键是高扭矩密度和高功率密度。例如MIT自主研发的猎豹系列的电机,可以达到33N·m的扭矩而质量仅1kg。而国产的电机仍达不到机器人高速运动所需的性能指标。
四足机器人整体的硬件结构如图9所示。
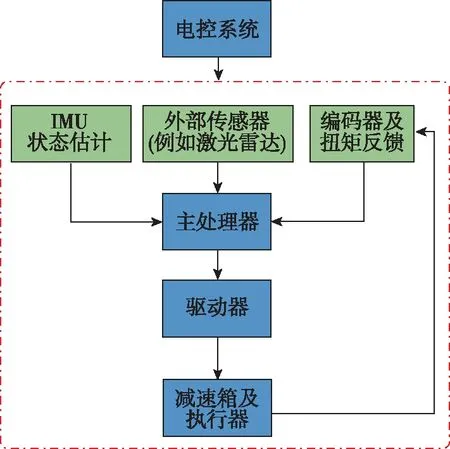
图9 硬件结构框图Fig.9 Hardware structure block diagram
3 四足机器人的控制
四足机器人的控制涉及多个层次和方面,自 1960 年第一个可控制的四足步行机器人诞生以来[23],许多学者就致力于机器人的运动规划和控制问题,并取得了长足的进展。但目前针对四足机器人的控制问题依然没有通用的框架和算法,虽然很多方法都经过实验验证,但找到一种高效通用的控制框架和算法依然是四足机器人研究的重难点问题。
3.1 四足机器人的运动规划
四足机器人的运动规划是指在机器人运动时,选择合理的地面接触点和腿部的轨迹规划,从而防止机器人倾倒,合理的腿部轨迹还可以减少机器人与地面的冲击。四足机器人的步态有多种,常用的有对角步态、蹦跃步态、疾驰步态等,不同的步态适用于不同的机器人速度[24]。四足机器人的步态也可以简化成双足的步态[25]。将四足机器人的一个步态循环视为1个周期,则针对1个步态周期,机器人腿部的步态相位为0~1,步态周期开始时,步态相位为0,结束时步态相位为1。对于不同的步态,机器人的不同腿之间有着不同的相位差,例如最简单的对角步态,机器人的左前腿和右后腿为相同的步态相位,而右前腿与左后腿为相同的步态相位,两者的相位差为0.5。通过改变腿部之间的相位差实现不同的机器人步态。
3.1.1 基于ZMP的步态规划
零力矩点(Zero Moment Point,ZMP),是针对静态步态稳定足式机器人的通用方法,即在机器人步态规划时,计算机器人的ZMP(在地面上存在一点P,使得与地面平行轴方向的、由惯性力F=ma与重力G所产生的净力矩为0的点)。使得ZMP始终位于机器人足端与地面的多个接触点所围成的多边形内[26],这样可以保证机器人具有理想的静平衡状态。基于ZMP的稳定方法在双足和四足机器人上均广泛使用,但ZMP算法的缺点也很明显,只适用于静态步态,对于复杂的动态步态,ZMP算法很难应用。
3.1.2 基于CPG的步态规划
CPG通过模拟生物的低端神经元,从而生成机器人的步态规划。该方法利用数学方法生成振荡曲线,将其作为腿部关节的位置和速度输入,具有一定的自稳定能力,通过振荡曲线还可以方便地调节四足机器人腿与腿之间的相位关系。但该方法仍有很大的局限性,由于依赖已知的振荡器,尽管该方法具有一定的自稳定能力,但在面对复杂的地形时,环境对机器人的扰动很大,CPG算法将不再适用。而野外的地形往往高度变化较大[27],针对该问题,Saputra等提出了可变神经元的神经振荡器,适应性更强[28]。
3.1.3 基于SLIP的运动规划
四足机器人的动态运动规划是四足机器人运动规划的核心问题,目前被广泛应用的动态运动模型是弹簧加载倒立摆理论(Spring Loaded Inverted Pendulum,SLIP)模型。该模型将四足机器人的单条腿简化为单自由度的具有柔性和阻抗的单杆结构。利用SLIP模型,波士顿动力公司的创始人Raibert于20 世纪 80年代实现了平衡腿的控制步态,包括单足、双足和四足。而Raibert提出的“弹跳高度-前进速度-机体位姿”三体解耦控制被认为是工程技术与理论分析的完美结合,近30年来仍然是足式机器人动平衡最有效的手段之一[29]。Piovan等还针对主动的SLIP模型控制进行了研究[30]。针对各种各样的四足机器人,Sehoon Ha等提出了将机器人参数化并与运动轨迹协同优化的新思路[31]。基于SLIP模型,机器人的步态相位可以分为飞行相和摆动相,并由此可以得到简化有效的机器人动力学模型,对机器人运动进行有效的规划。
3.1.4 基于贝塞尔曲线的轨迹规划
MIT猎豹系列机器人的一代和二代采用了基于贝塞尔曲线的腿部轨迹生成方法[32]。利用该方法,MIT猎豹细节机器人可以实现高速运动状态下的步态切换。对于机器人脚部的轨迹规划问题的主要目标是:具有足够的离地间隙,从而保证机器人能跨越适当的障碍,并且要具有理想的摆动腿回缩率(适当的摆动腿回缩率可以提高机器人运动时的稳定性,适当的腿部攻角可以降低冲击能量损失),轨迹曲线通过一定数量且满足机器人运动中速度和加速度要求的关键点,从而利用贝塞尔曲线生成腿部运动轨迹。摆动相和支撑相是分开设计的,支撑相的轨迹是正弦曲线,2个轨迹围绕着单个参考点来设计。这种方法使得MIT猎豹机器人拥有更高效的运动规划,但面对复杂的地形仍然不是通用方法。
3.2 四足机器人的运动控制
动态稳定性是机器人运动的关键[33]。四足机器人的运动控制是指在机器人动态运动过程中,利用合理的算法对机器人的位置和关节力矩进行控制,从而实现机器人的动态稳定性和鲁棒性[34],并减少与地面的冲击。针对复杂环境开发的足式机器人需要能够保证良好的跟踪性能和环境适应性的控制器[35]。
3.2.1 柔顺阻抗控制
柔顺性分为主动柔顺和被动柔顺两种,机器人凭借柔顺机构(如弹簧),使其在与环境接触时能够对外部作用力产生自然顺从,称为被动柔顺性[36];机器人利用力反馈信息采用一定的控制方法去主动控制作用力,称为主动柔顺性[37]。
被动柔顺控制的典型应用是串联弹性驱动器(Series Elastic Actuator,SEA),通过在传统的刚性致动器和连杆之间放置被动柔顺元件而设计[38]。StarlETH机器人应用SEA[39],可以精确地控制关节扭矩和存储大量的能量,弹簧将变速箱与连杆分离,使得机器人与地面接触时具有鲁棒性。这种设计有效地减少了StarlETH的能量损耗,总功率小于230W。
主动阻抗控制的典型应用是HYQ机器人[40],通过实时改变电机PID控制器的PD参数,相当于实时调整机器人腿部的刚度和阻尼,将电机模拟成被动柔顺元件。控制回路分为内环和外环,外环利用关节角位置作为反馈,输出扭矩信号。该扭矩信号作为内环扭矩控制回路的参考,基于低阶模型设计了高性能转矩控制器,在不需要实际弹簧的情况下成功实现可调阻抗。
3.2.2 前馈控制
机器人的力矩控制是动态响应最快的方法,针对四足机器人的力矩控制,最常见的方法是前馈力矩控制。MIT二代猎豹机器人针对跳跃运动,以实现接触界面的前馈力为基础,实现对机器人的力矩控制[41]。通过检测驱动电机的输出电流完成关节力矩的检测,实现了对地面反作用力的高保真控制。HYQ机器人将扭矩信号作为前馈参考,并基于低阶模型设计了高性能转矩控制器[42]。
前馈力矩控制和柔顺控制可以同时应用于四足机器人控制,使得四足机器人同时具有柔顺阻抗特性和快速的动态响应,控制框图如图10所示。

图10 前馈力矩+柔顺控制框图Fig.10 Feedforward torque and impedance control block diagram
3.2.3 分层操作空间控制
StarlETH机器人应用了基于分层任务优化的四足运动操作空间控制(Object-based Storage Controller,OSC)[43]。将复杂的机器人行为通过一组简单的最小二乘问题来描述,将运动任务、扭矩任务和接触力优化任务分为不同的优先级,使用了多个接触点的浮动基础系统的投影动力学。首先对系统进行动力学建模,建立了3个优化变量,分别是期望的运动、期望的关节扭矩和期望的地面接触力。期望的运动为最高优先级。采用分割优化的方法,利用线性算子将模型降阶,分别忽略关节扭矩和地面接触力,并利用QP求解器进行求解。最后使用最小二乘法分别对三种任务进行优化。OSC控制框图如图11所示。

图11 OSC控制框图Fig.11 OSC control block diagram
3.2.4 模型预测控制
模型预测控制(Model Predictive Control,MPC)是一类特殊的控制。它的当前控制动作是在每一个采样瞬间通过求解一个有限时域开环最优控制问题而获得[44],不需要建立复杂的非线性机器人模型。当前的控制状态作为一个控制周期的初始状态,控制器的解作为第一个控制输出,本质上是一个求解开环最优控制的问题。MPC控制框图如图12所示。
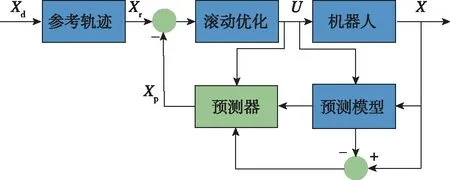
图12 MPC控制框图Fig.12 MPC control block diagram
典型案例是MIT猎豹三代机器人[45],针对MIT猎豹三代的动态运动问题使用了凸优化模型预测控制方法。针对地面反作用力,利用离散时间有限时域模型预测控制器找到期望值。考虑地面反作用力而不是关节扭矩,因此预测控制器不需要知道腿的配置或运动。预测控制器利用最小二乘法找到最优解。实验表明,最终第三代cheetah完成了各步态在跑步机上的高速运动。对于非结构环境下的步态模式,第三代cheetah使用了正则化模型预测控制方法[46],目的是降低解的复杂性。由顶层的控制结构完成机器人运动的期望轨迹,该控制方法的目的是控制足部和地面接触的位置以及与地面接触的力。
3.2.5 神经网络自适应控制器
由于四足机器人是一个复杂的非线性模型,很难得到精确的数学模型,因此采用神经网络(Neural Network,NN)可以实现对机器人动力学方程未知部分的精确逼近,从而实现无需建模的控制[47]。应用神经网络可以使得机器人的适应性更强,针对四足机器人的神经网络自适应控制是近年来四足机器人研究领域的热点。神经网络自适应控制框图如图13所示。
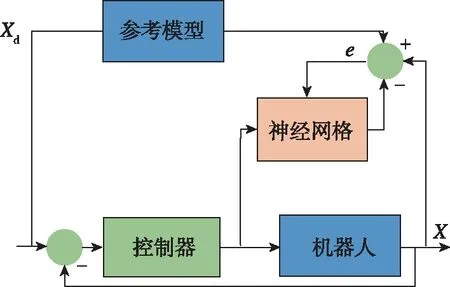
图13 神经网络控制框图Fig.13 NN control block diagram
4 四足机器人的环境感知技术及智能化
伴随着传感技术的发展和多传感器融合技术的应用,在四足机器人上搭载相应的传感器使得机器人可以和环境交互并提高其对环境的适应性已经成为研究的重要方向。环境感知是实现机器人自主定位和导航的基础技术,是机器人实现真正自主的关键。
4.1 传感器和环境感知
传感器是环境感知的基础和关键元素。例如基于距离测量理论的三维多层激光雷达将获得足够的数据,用于快速障碍物检测。传感器获取环境信息是帮助机器人获取自身状态信息和周围环境信息的技术。这些传感器可以分别称为本体感知传感器和外部感知传感器:Bigdog有大约50个传感器来感知它自己的状态和外部环境信息。而与外部传感器相关的传感器可分为视觉传感器和非视觉传感器。视觉传感器能够获取的信息种类繁多,是机器人获得环境信息的重要途径[48],在某些情况下,这种传感器对环境信息的获取是不可替代的,但是视觉传感器很容易受到光照和阴影的影响[49];非视觉传感器,如激光传感器、超声波传感器和红外传感器,都是基于距离测量理论,其测量精度高于视觉传感器,但这些传感器的信息仅限于距离和强度,容易受到镜面反射或漫反射的影响;其他传感器,如力、触觉传感器,也在机器人环境感知中起着重要作用。值得一提的是波士顿动力公司的LS3机器人,通过扩展卡尔曼滤波器将立体摄像头传感器、惯性测量单元、腿部测距和可选的间歇全球定位系统(Global Positioning System, GPS)位置更新融合在一起,以确保稳定、低延迟的性能[50]。
4.2 自主化及智能化

图14 ANYmal爬楼梯Fig.14 ANYmal stairs climbing
四足机器人最终的发展方向是拥有自主性并帮助人类在复杂的环境下完成任务。实时定位与建图(Simultaneous Localization and Mapping,SLAM)技术是四足机器人实现自主性的关键,SLAM技术的作用是帮助机器人完成传感器数据的融合,最终实现机器人在环境中的定位并建立所需的环境地图。通过集成SLAM技术,机器人可以完成后续的导航、路径规划和实时避障,从而实现四足机器人的自主性运动。智能化程度也是未来评价四足机器人的重要指标之一。面对复杂的环境,机器人还应具有穿越复杂地形的能力,目前较先进的四足机器人已经能够完成爬楼梯等动作(例如图14所示的ANYmal机器人),而最终的目标是使四足机器人具有在野外独立自主运行的能力。真正的动物不仅具有运动的自主性,还能够完成物种间协作甚至与人类协作。因此未来的四足机器人要帮助人类完成任务,就必须要有较高的智能,例如能够听懂人类的语言、通过肢体运动完成与人类的互动、执行复杂任务时有一定的判断能力和与其他四足机器人之间协同完成任务等。近年来,多智能体协同控制理论发展迅猛并应用在各个领域,若应用到四足机器人领域,使得机器人之间具有相互协同完成任务的能力,必将使四足机器人能够完成更加复杂多样的任务,四足机器人的应用范围也会更加广泛。神经网络的发展也为四足机器人的智能化提供了新思路,将神经网络应用于四足机器人,可以使得四足机器人拥有学习的能力。机器人可以通过在复杂的环境中运行来学习更为有效的运动方式,这样在制造机器人时,无需考虑机器人运行所需要面对的复杂情况,而是通过学习的方式来适应环境。拥有学习能力的四足机器人将更像一个真实的动物,能够完成更加复杂的任务。
5 研究的不足及未来的关键性技术
5.1 高强度的机械设计
机器人在移动时足端会受到地面的巨大冲击,甚至可以达到站立状态的几十倍。目前的四足机器人研究领域依然没有大规模使用新材料,虽然使用主动柔顺和被动柔顺技术可以减弱冲击,但当机器人需要负重时,高强度的机构设计依然至关重要。因此在未来的四足机器人研究中,应用高强度的轻质材料及高强度的机械结构创新是发展的重要领域。
5.2 高带宽执行器设计
机器人的动态性能依赖于执行器的带宽,即执行器对信号的响应速度。尤其是奔跑和跳跃的时候,需要执行器高速运动,对控制信号高速响应,若带宽不足则很难保持动态稳定。
5.3 高能量密度执行器及新执行机构
高能量密度的执行器可以在满足功率时大大减小执行器的质量,从而减轻机器人自重,提升机器人负载能力,降低对机构强度的需求,并提高机器人的续航能力。目前四足机器人常用的液压、电驱动及气动执行器在原理上仍与真实四足动物的肌肉有很大差异,无法像真实的动物一样运动自如。因此机器人执行器的创新是四足机器人研究的重要领域之一。
5.4 动态自平衡控制
机器人静态稳定性判据已经发展的非常成熟,但在机器人动态运动时,静态稳定性判据难以满足要求。而动态自平衡控制发展仍不足,依然没有计算量低且适应性强的通用方法。在未来的四足机器人研究领域,找到一种计算量低,且可以适应各种复杂地形的具有普适性的动态自平衡控制方法至关重要。
5.5 智能化
目前的四足机器人普遍存在智能化和自主化程度不足的问题,依赖于操作员对其进行控制。四足机器人若要完成复杂的任务,就必须有和环境交互的能力,因此SLAM技术、自主导航技术等智能化技术是未来四足机器人发展不可或缺的部分。随着人工神经网络和强化学习的发展,将神经网络和强化学习应用于四足机器人[51],可以使得机器人更能适应非结构化的环境,未来的四足机器人会更加自主和智能。而随着多智能体协同控制理论的发展,机器人之间协同完成任务也越来越成为机器人研究的重点。
5.6 国内研究领域的不足
针对国内四足机器人研究领域,与波士顿动力公司和MIT的猎豹系列机器人的差距主要体现在仿生结构、执行器参数及智能化等方面。
仿生结构方面,国内的四足机器人依然与真实的动物相差甚远,结构不够灵活,感知方式仍然依赖于外部传感器,而真实的动物更多地来自本体的感知,即触觉。国内研发的四足机器人的结构设计和运动方式与MIT系列机器人相比仍不够仿生,对于真实动物拥有的踝部、腰部、尾部等研究不足,结构设计上仍缺乏创新。
国产的执行器相比于世界一流水平仍有较大差距,带宽偏低且能量密度不高,所以国内的四足机器人执行器大多依赖于进口。而国产驱动器的精度和时效性也是制约国内四足机器人发展的重要原因之一。
智能化方面的差距更为突出,国内的四足机器人运动方式更保守、更僵硬,面对复杂的地形,抗干扰能力弱。波士顿动力公司发布的四足机器人已经能够完成搬箱子、开门等任务,LS3机器人能够在野外连续运行几小时以上;而国内的四足机器人研究仍处于实验室阶段,还未有实现特定任务和野外长时间运行的能力。
整体上国内四足机器人研究领域仍处于模仿的阶段,创新性不足。若要实现国产的四足机器人达到世界先进水平,不仅要在结构设计和执行器设计等硬件方面有所提升,更要在智能化等领域有所创新和突破。
6 结论
随着越来越多的科研团队加入对四足机器人的研究,四足机器人领域的发展日新月异,但仍有一些根本性的问题需要突破,四足机器人未来的发展趋势是负重能力更强和移动速度更快、环境适应能力更强、续航时间更长。而随着机器人学科与其他学科的融合,四足机器人必将越来越智能化,与真实四足动物的差距会越来越小。目前已经有科研团队在人造肌肉领域取得了突破性进展,而类肌肉的执行器必将使四足机器人发展至一个全新的高度,未来的四足机器人必将可以帮助人类完成更多更复杂的任务。
猜你喜欢
液压与气动(2022年10期)2022-11-27
电工技术学报(2022年20期)2022-10-29
现代仪器与医疗(2022年4期)2022-10-08
汽车实用技术(2022年15期)2022-08-19
家用电器(2022年7期)2022-07-13
包装工程(2022年10期)2022-05-27
汽车维修技师(2019年2期)2019-08-23
科学之谜(2018年4期)2018-09-17
伴侣(2016年8期)2016-08-11
恋爱婚姻家庭(2015年27期)2015-12-19