
植物病原菌孢子智能捕捉系统设计与实现
2019-10-09 00:45赵远超胡宪亮王圣楠孙洪涛李晓慧赵建平
自动化仪表 2019年9期
赵远超,胡宪亮,王圣楠,孙洪涛,李晓慧,赵建平
(1.曲阜师范大学物理工程学院,山东 曲阜 273165;2.济南祥辰科技有限公司,山东 济南 251400)
0 引言
气传病害是植物病害中的一类重要病害。植物病原主要通过气流进行传播,从而完成侵染[1]。孢子是真菌主要的繁殖方式。孢子产生数量很大,且体积小、质量轻,很容易通过气流传播[2]。因此,农作物田间空气中病原菌孢子的数量和农作物病害发生有着密切的关系。对田间空气中病原菌孢子进行及时准确地捕捉和计数,可为农作物病害的诊断提供基础数据,对降低农作物病害发生而造成的损失具有重要意义[3]。
目前,对于空气中病原菌孢子的捕捉和计数,多采用孢子捕捉器进行取样和监测,待捕捉结束后将黏附有病原菌孢子的载玻片带回实验室进行显微观测和统计[4]。这种方式需要人工收集载玻片在显微镜下观测统计,存在智能化程度低、费时费力的缺点[5]。针对传统孢子捕捉器存在的弊端,本文结合计算机技术、传感器技术和无线通信技术,基于高倍显微镜、电荷耦合器件(charge coupled device,CCD)数字摄像头、嵌入式工控机和云服务器等,提出了一种以脉冲信号作为控制信号,具有高放大倍数、高分辨率的智能植物病原菌孢子捕捉系统。该系统能够自动捕捉病原菌孢子、远程实时、定时将病原菌孢子的数量及形态图像上传至云服务器,为病害监测预警和防控工作提供了重要科学依据。
1 系统功能需求分析和总体设计
根据植物病原菌孢子的传播原理、传统孢子捕捉器存在的缺点,病原菌孢子智能捕捉系统需要满足以下功能需求。
①病情图像自动采集功能:系统能够实现从载玻片加载、病原菌孢子捕捉、显微成像、已使用载玻片回收过程全自动化运行。
②孢子形态图像上传及控制命令下发:通过无线网络将采集的病原菌孢子数目、形态图像上传至云服务器;同时,用户可根据需求设置显微镜放大倍数和气流采集的时间、时长。
③病原菌孢子实时监测面板:系统对图像数据与病害孢子及病害发生指数数据库进行自动比对,得出农作物病害情况并发出预警;用户可以查看图像数据。
根据上述功能需求,本文将系统分为感知层、网络层和应用层[6]。系统架构如图1所示。
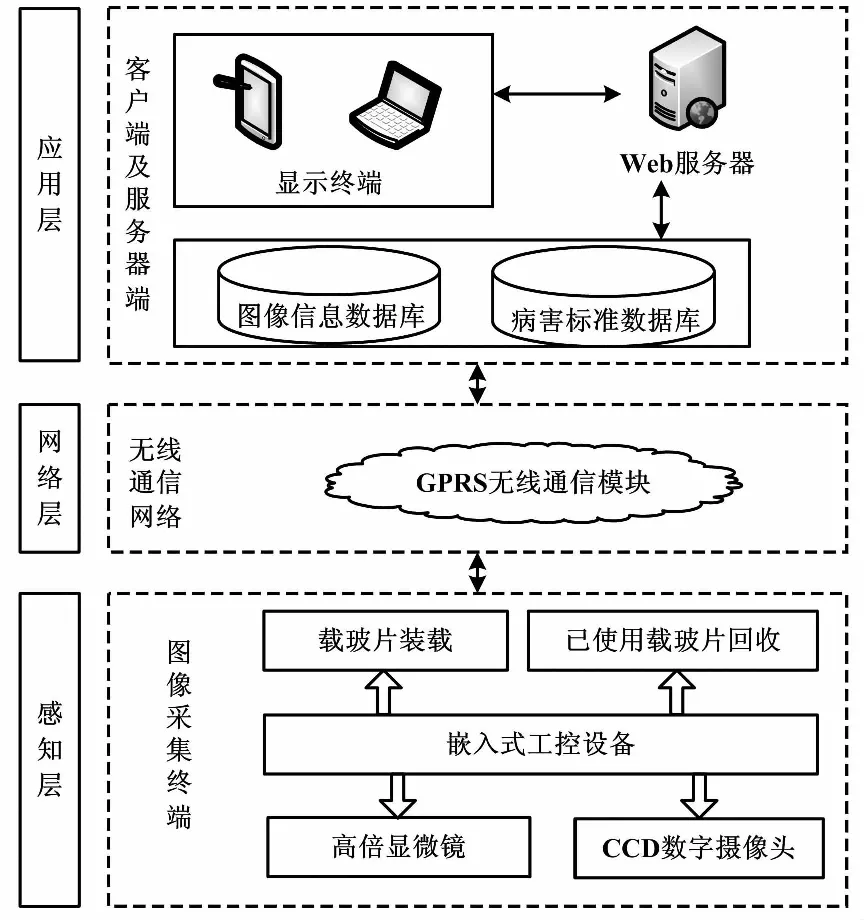
图1 系统架构图
2 系统硬件设计
为了实现对田间农作物病原菌孢子捕捉的智能化,本文设计的孢子智能捕捉系统主要包括控制器模块、病原菌孢子捕捉模块、显微图像采集模块以及无线通信模块等四部分。系统硬件设计如图2所示。
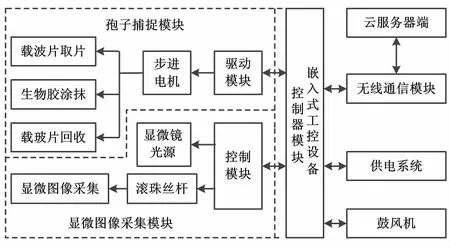
图2 系统硬件设计图
2.1 控制器模块
控制器模块是整个系统的控制核心,主要完成各模块的控制工作[7]。由于系统需要对步进电机、鼓风风机、无线通信模块、高倍显微镜和CCD数字摄像头等模块进行精确控制,所以要求控制器模块具有强大的运算能力和丰富的外设接口。因此,本系统采用青岛栋林科技有限公司生产的XC-2150F型嵌入式工控机。该工控机内核基于Intel Corei7处理器,运行内存容量最大支持8 GB,具有5个通用串行总线(universal serial bus,USB)接口和4个串行通信(cluster communication port,COM)端口,能够满足步进电机、无线通信模块和高倍显微镜和CCD摄像头等设备同时接入,保证了孢子图像数据的采集与处理速度。
2.2 病原菌孢子捕捉模块
病原菌孢子捕捉模块的主要功能为:在电机驱动模块、步进电机与鼓风风机三部分的共同作用下,进行载玻片自动装载、生物胶涂抹、孢子吸附和废弃载玻片的回收等操作任务,实现田间病害孢子的自动捕捉。
由于本系统对于运动控制的精度要求比较高,因此电机选用高精度的两相四线步进电机作为运动控制部件。步进电机的驱动控制模块作为本系统研究的关键技术之一,是由UIM2501控制协议转换器连接UIM242控制驱动器实现的。UIM2501搭配UIM242控制驱动器实现了控制器局域网总线(controller area network,CAN)协议与RS-232协议的转换,从而避免CAN协议带来的一系列复杂问题。嵌入式工控机可利用一个UM2501控制协议转换器连接多个UIM242控制驱动器驱动多个步进电机,为实现多电机驱动提供了便利。
2.3 显微图像采集模块
显微图像采集模块主要由高倍显微镜、CCD数字摄像头、显微镜光源补偿和滚珠丝杆组成。在嵌入式工控机的控制下,步进电机带动滚珠丝杆对显微镜焦距进行超高精度调节。光源是CCD摄像头对物体清晰拍照的重要因素。在对物体进行成像时,CCD摄像头上光敏元件感受到外界光线变化,产生电流信号作用于工控机。工控机根据电流信号大小生成脉冲宽度调制(pulse width modulation,PWM)信号,调节发光二极管(light emitting diode,LED)的强弱变化,以满足在不同环境光下对CCD相机拍摄所需最佳亮度需求[7-8]。本系统采用奥林巴斯BX51型高倍显微镜作为田间病原菌孢子图像拍摄,选用低功耗大功率灯珠为显微图像采集提供光源补偿。
2.4 无线通信模块
无线通信模块的主要功能是将图像数据经无线网络上传至云服务器端,同时将用户下发的控制指令转发至嵌入式工控机,是应用层与感知层进行数据交换的“桥梁”[9]。考虑到系统低功耗、易扩展等实际需求,故选用山东楠林信息技术公司推出的XC-GPRS无线数据传输模块。该模块利用运营商通用分组无线服务技术(general packet radio service,GPRS)为用户提供无线长距离数据传输功能,具有RS-232和RS-485接口,支持AT指令,上传速率最大支持60 KB/s,实现了服务器端对显微图像采集系统的远程控制和图像数据的远程传输。
3 系统软件设计
针对病原菌孢子智能捕捉系统控制需求,基于系统的硬件模块的研究基础,设计了具有人机交互能力的软件系统[10]。系统软件主要包含三部分内容:①病原菌孢子采集;②显微图像处理;③监测平台应用程序设计。
3.1 病原菌孢子采集
为实现载玻片的自动装载、生物胶涂抹、空气中孢子捕捉、显微图像处理和废弃载玻片回收等任务操作,以嵌入式Windows 7为操作系统、Microsoft Visual Studio2010为开发平台,设计了以嵌入式工控机为核心的病原菌孢子采集软件系统。孢子采集与显微图像处理流程如图3所示。
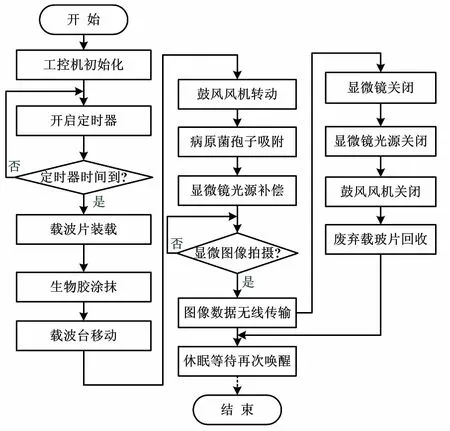
图3 孢子采集与显微图像处理流程图
3.2 显微图像处理
病原菌孢子数目、形态等特征的提取是实现与病害发生指数数据库进行自动比对的基础。系统采用图像特征提取软件OpenCV对孢子数目、形态进行提取,数据库SQLServer 2008实现孢子特征数据库与病害发生指数数据库的构建。
为筛选清晰显微图像,首先运用OpenCV对原图像进行灰度化、边缘滤波处理;然后通过对图像的每一行隔一个像素取一个灰度值,得到新的灰度矩阵V(i,j);再根据式(1)计算相邻灰度方差,从而得到清晰图像;最终通过边缘检测方法提取到孢子的数目和形态。

I(x+1,y)]
(1)
式中:I(x,y)为(x,y)位置对应的灰度值;n为图像的像素点个数。
3.3 监测平台应用程序设计
为简化客户端电脑载荷,减轻系统维护与升级的成本和工作量,监测平台应用程序采用浏览器/服务器(browser/server,B/S)结构。为了满足用户对田间农作物生长状况的实时监测,使用Java服务器页面(javaserver pages,JSP)技术开发Web端,搭建配置Tomcat服务器,采用层叠样式表(cascading style sheets,CSS)和JavaScript等相关技术对网站页面进行排版,以求达到视觉上的美观。监测平台应用程序包括登录孢子图像远程监控子系统、病情预警发布子系统、气象数据监测子系统3个子系统。用户在安装OXC.EXE插件下的IE11浏览器上输入网址,即可进入登录界面。
4 系统实现与测试
根据上述研究思路,设计了病原菌孢子智能捕捉系统。为了验证系统的性能,于2017年6月与2017年11月期间,将病原菌孢子智能捕捉系统和传统孢子捕捉器同时放置在济宁市汶上县次丘农场小麦田内进行测试。运行结果如表1所示。

表1 运行结果
由表1可以看出,与传统孢子捕捉器相比,病原菌孢子捕捉系统不仅具有自动采集、自动计数、自动上传数据的优点,而且在采集孢子图像、孢子检测精度等方面体现出更加优异的性能,为农、林业病虫害的防治提供了可靠保障。本系统同时配备了空气温湿度、土壤温湿度、风速风向等气象因子的实时监测,以便进行病害发生与气象数据的关联性分析。
5 结束语
针对当前孢子捕捉器普遍存在工作效率低、孢子识别率差、费时费力等缺点,设计了一种以脉冲信号为控制信号,具有高放大倍数、高分辨率的智能农作物病原菌孢子捕捉系统。田间测试表明,系统可长时间稳定工作,能够实现从载玻片加载、病原菌孢子捕捉、显微成像、图像数据上传和废旧载玻片回收等操作的全自动化,为病害监测预警和防控工作提供了重要科学依据,对降低农作物病害发生而造成的损失具有重要意义。
猜你喜欢
四川蚕业(2022年1期)2022-06-06
河南畜牧兽医(2021年1期)2021-01-07
河南畜牧兽医(2021年5期)2021-01-06
中国卫生标准管理(2020年18期)2020-10-16
铁道通信信号(2020年12期)2020-03-29
中国交通信息化(2017年4期)2017-06-06
中国人兽共患病学报(2017年2期)2017-03-16
科学大众(中学)(2015年9期)2015-10-12
印刷技术·数字印艺(2015年7期)2015-08-31
少儿科学周刊·少年版(2015年3期)2015-07-07
