两种火灾烟雾识别方法的研究
2019-10-16 06:17齐爱玲贾澎涛龚尚福
西安科技大学学报 2019年5期
李 娜,齐爱玲,贾澎涛,龚尚福
(西安科技大学 计算机科学与技术学院,陕西 西安 710054)
0 引 言
近期,山西、北京、四川等地连续发生森林火灾,成为舆论焦点,且多地火险维持在“极度危险”级别。火灾严重危及生命安全,同时造成生态环境破坏等一系列损失。对火灾征兆进行及时检测,在火灾预警和中有着极其重要的意义。火灾形成初期,大多数情况下没有明显的火焰信号,只有阴燃现象和大量的烟雾,所以烟雾探测可实现早期预警。通过视频捕捉火灾前图像进行探测和预警成为火灾探测领域里的一个新研究方向,该方法克服了传统火灾探测技术在大空间或室外场景应用中的局限。
对于火灾产生的烟雾及其与烟雾颜色相近物体的准确有效区分,成为火灾烟雾检测的难点之一。烟雾的属性信息,如:颜色、边缘和梯度区分不明显,这给检测的进行制造了障碍。特征的提取是准确和快速进行烟雾检测的关键。基于特征点的火灾烟雾识别给这类问题提供了一个很好的解决方法。利用烟雾检测算法,自动识别烟雾图形的特征,被应用于公路隧道[1]、森林大火[2-3]、城市轨道交通[4]、舰船着火[5]等室外环境的火灾安全预防中。
1 火灾烟雾检测的研究现状
1.1 国内外研究现状
基于烟雾识别的火灾烟雾探测技术关键是提取烟雾和气体特征。提取方法上主要有图像识别[6]、显著特征[7-9]、多特征融合[10]、深度神经网络[11]等。文献[12]提出一种通过融合烟雾多个特征的方法来检测识别早期林火烟雾。针对复杂场景烟雾特征提取,陈俊周等提出一种静态和动态特征结合的卷积神经网络视频烟雾检测框架[13]。王文朋等人基于图像ImageNet数据集,利用VGG-16模型进行同构数据下的特征迁移,提出一种基于深度迁移学习的烟雾识别方法[14]。常用烟雾特征描述方法有:统计量特征、变换域特征、局部模式特征。
李诚等人通过结合统计量特征和深度学习方法实现了视频烟雾检测[15]。在使用人工设计特征时采用较弱的阈值设置,实现了城镇森林交界域烟雾的准确识别。Shrivastava等人利用K均值聚类图像分割算法,对静态相机获得的帧序列实现有效烟雾检测[16]。
高丰伟等人结合传统手动提取方法和CNN自动提取烟雾特征,与传统的方法相比,该方法在烟雾准确率和误检率上都有明显的提高,同时对于光照和烟雾浓度的敏感度有降低[17]。姚太伟等人提出基于小波变换的森林视频火灾烟雾检测方法,使用帧间差分法和质心算法提取疑似烟雾运动目标区域,对提取的运动目标前景区域和背景区域分别进行小波能量特征提取与分析[18]。
兰久强等人提出基于颜色和纹理特征的林火烟雾识别方法,使用颜色特征确定烟雾疑似区域,利用小波变换提取相关度特征,支持向量机进行烟雾识别[19]。Jian等针对火灾烟雾检测早期存在的问题,提出一种结合两步分割和运动特征的烟雾可疑区域提取方法[20]。
1.2 现阶段火灾烟雾检测技术存在的问题
火灾探测研究虽然在烟雾检测技术中一直有新的算法被提出,但还存在一些问题。因为烟雾的不规则性和本身颜色的特殊性,传统常用的方法根据烟雾特点进行分割,再提取可疑目标区域,但是烟雾通常情况下不是呈均匀分布,并且烟雾往往是由很多离散的小区域组成,在检测过程中较为复杂,导致对烟雾区域不能明显区分。
对于火灾探测和预警来说,如何提取火灾产生的烟雾特征是其重要的步骤之一,精确的特征能够极大提高识别的准确率和稳定性。通过颜色统计特征和小波变换2种技术在烟雾特征检测中的应用,分析各自的特点并得出具体的场景适用性结论。
2 基于颜色统计特征的火焰烟雾识别
燃烧初期的烟雾通常是青灰色,其R,G,B三个颜色值基本相等,用α表示其相似程度,计算公式为α=max(|R-G|,|G-B|,|B-R|),最终的α范围在0到20之间。HSI颜色模型中色度H的初期烟雾特征取值范围为175°≤H≤185°,文中用H的取值范围判别图像中的烟雾区域。
2.1 选取基准点
对于HSI模型选取色调分量H在175°≤H≤185°的像素点,计算α参数,如果α范围在0到20之间,则将此像素点作为基准点x.将图像中其余α参数在0到20之间像素点与基准点比较,若像素空间距离D≤0.2,认为这个像素点与所设立的基准点相似,对其进行保留;当D>0.2时,将对应的像素点视作噪声并置为白色。
在RGB模型中基准点x归一化得到(MR,MG,MB),见式(1)
(1)
基于HSI模型,基准点x计算见式(2)
(2)
式(2)中 min(MR,MG,MB)是像素点归一化后的最小值,max(MR,MG,MB)则是像素点归一化后的最大值。式(2)中H0的计算见式(3)
H0=
(3)
2.2 计算空间距离
在烟雾颜色模型中,需要将满足α参数在0到20条件下的像素点与基准点做比较。设像素点y满足要求,其中HSI模型三分量值分别为h,s,i,设x,y两点的空间距离为D,则有式(4)
(4)
式(4)中,V1,V2,V3的计算见式(5)
V1=(1-i)2
V2=S×cosH-s×cosh×(S×cosH-s×cosh)
V3=S×cosH-s×sinh×(S×cosH-s×cosh)
(5)
2.3 烟雾模型算法
利用人类视觉与HSI颜色空间距离的关系,通过计算所需要的像素点与事先确定的基准像素点之间的距离,判断像素点是不是烟雾点。基于烟雾颜色特征的数字图像处理系统总体流程如图1所示。

图1 颜色统计特征方法流程Fig.1 Flow chart of color statistical feature method
烟雾识别根据HSI颜色距离与人类视觉的关系,分析提取图像中的烟雾点,来判别是否有火焰产生。在检测图像的面积阈值过程中,需要将彩色图像先转换变为灰度图像,之后确定一个值来进行二值化处理。通过阈值比较,保留疑似烟雾区域,最后用挖空法得到烟雾区域轮廓,以达到识别火灾烟雾的目的。
3 基于小波变换的烟雾识别
烟雾的半透明性即背景的模糊性能够较为准确地反映其特征。烟雾的产生使背景的纹理变得模糊,在信号域上表现为信号衰弱,可通过小波变换进行烟雾的识别。
3.1 均值背景
均值背景在处理连续运动的目标时,将运动中的目标看作噪声,通过连续帧的图像累加平均来消除这种噪声,也就是利用运动中目标图像序列的平均获得背景图像,具体计算见式(6)
(6)
式中x和y为横纵坐标;Background为均值背景;img为连续目标图像;n为图像序列值。均值背景需读取连续帧图像并通过累加平均得到,在这个过程中,使用三维矩阵mat(x,y,k)存储每个帧的灰度值,其中k是固定值,可以是整个视频,也可以是固定时间段内的图像序列。
3.2 小波变换烟雾检测
烟雾通常会遮挡其他物体,物体的背景在空间域中趋于模糊,烟雾图像表现为高频信号,非烟雾图像将背景图像完全遮挡。根据这一特性,利用二维离散小波变换提取背景纹理,对纹理变得模糊的特征进行判别,最后实现烟雾检测。
二维离散小波变换分为4部分:低频分量子图和3个高频分量子图,其中,3个高频分量子图包含水平方向、垂直方向和对角方向的纹理信息。当图像中出现烟雾时,通常会降低3个高频量子图的能量值。
设Wn(x,y)表示由3幅高频分量子图的能量值之和构成的复合图像,则有式(7)
Wn(x,y)=|LHn(x,y)|2+|HLn(x,y)|2+|HHn(x,y)|2
(7)
LH,HL,HH分别为3个高频分量子图垂直方向、水平方向和对角方向的能量值。将复合图像分解成大小为(K1,K2)的子块,第i个图像子块的能量ei(l1,l2)为
(8)
式中Ri为复合图像Wn(x,y)中大小为(K1,K2)的第i个子块;(l1,l2)为能量子块在复合图像中的相应位置。
将处理后图像的高能量部分与原图像相同区域内的高能量部分进行对比,如果(l1,l2)处的子块能量值ei(l1,l2)被降低,则判断这一部分图像纹理或边缘模糊,图像的对应区域出现烟雾。
为了提高识别率,设阈值T1与T2为0.6与0,如果图像中出现烟雾导致小波高频能量减少,则ei(l1,l2)应满足式(9)
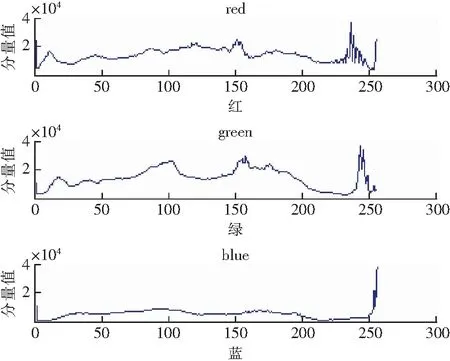
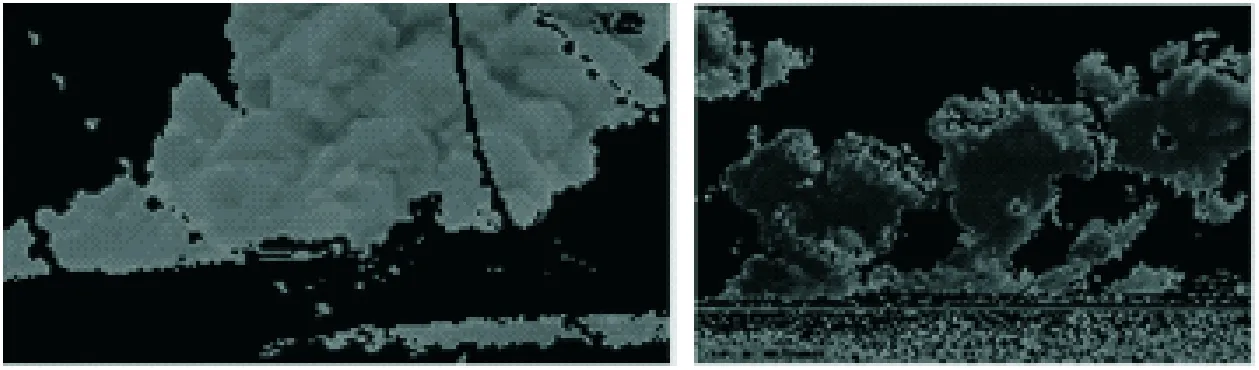
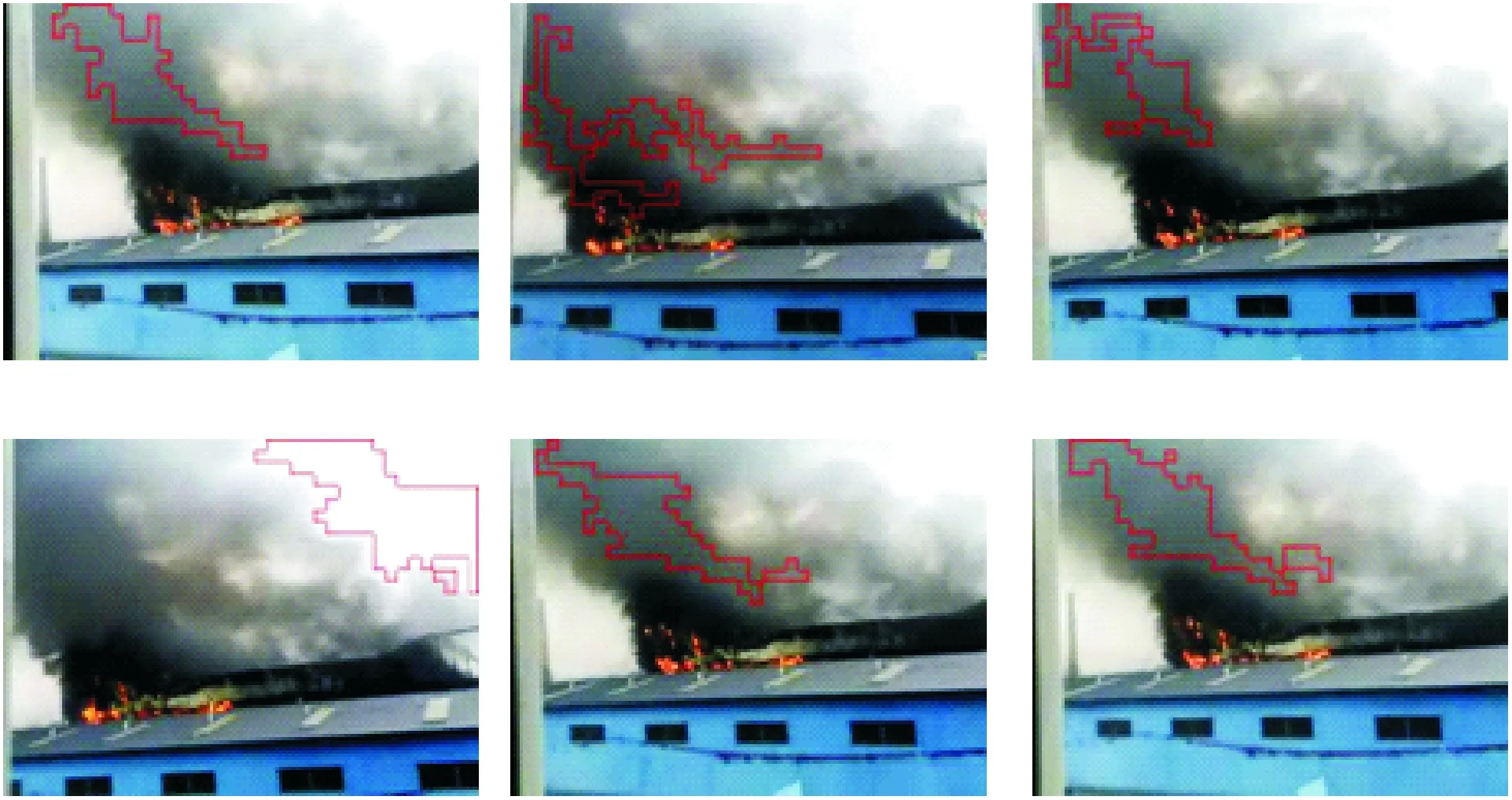
T2×ei(l1,l2) (9) 式中ei(l1,l2)为由背景图像构成的复合图像在(l1,l2)处的子块能量值。将满足式(9)的能量子块内的像素值设置为0,即HL(l1,l2)=0,LH(l1,l2)=0,HH(l1,l2)=0,CA(l1,l2)=0,CA为低频分量值。然后再通过小波反变换还原出原图像,此时原图像缺失了被识别为烟雾区域的像素值,接着通过构造图像的二值图取反补全空洞,最大连通区域即为烟雾区域。小波变换烟雾识别的具体流程如图2所示。 图2 小波变换烟雾识别流程Fig.2 Flow chart of smoke recognition based on wavelet transform 火灾烟雾识别由6部分组成,包括图像读取、彩色图像灰度化、边缘检测、烟雾图像的RGB值统计、烟雾检测和主程序实现。界面显示如图3所示。 图3 烟雾检测图像选取Fig.3 Selection of smoke detection image 利用人类视觉与空间颜色距离的关系,判断所扫描像素点是否烟雾所在的像素点。通过下面的实验进行烟雾颜色特征提取,使得准确的烟雾检测为火灾预警提供有利的前期指导,如图4所示。 图4 烟雾颜色特征提取Fig.4 Extraction of smoke color features 利用边缘检测对火灾图像中亮度变化明显的烟雾点进行识别,不同灰度值的相邻区域不连续。利用算子进行烟雾的边缘检测,结果如图5所示。 图5 烟雾的边缘检测结果Fig.5 Edge detection of smoke 通过分析触发探测器警报时的图像RGB值,统计获得基准点计算量。基准量分布如图6所示。 对应图3中的fog1和fog12,烟雾颜色特征方法的识别效果如图7所示。该算法计算复杂度较小,烟雾提取准确。适合颜色较深的烟雾识别,颜色越深检测越准确,可通过调整RGB值的基准范围进行泛化。 在处理连续运动的目标时,将运动中的目标看作噪声,通过连续帧的图像累加平均来消除这种噪声,利用运动中目标图像序列的平均获得背景图像,如图8所示。 通过计算均值背景、截取视频帧图像、运行主函数几个过程,实现小波变换烟雾识别,结果如图9所示。 图6 RGB的基准量分布Fig.6 Baseline distribution of RGB 图7 提取的烟雾图像Fig.7 Extraction of smoke image 图8 烟雾场景及均值背景Fig.8 Smoke scene and mean background 从实验结果可以看出,基本检测出烟雾部分,但是由于背景图像抽取的效果或视频本身的分辨率及抖动等原因,导致检测时对烟雾的识别不够准确。经过多次实验,证明该方法能够识别出烟雾,但跟视频本身的分辨率、视频拍摄时抖动情况及烟雾的运动幅度有关系。 通过多次实验结果的比较,发现利用烟雾的颜色特征进行识别的方法适用于较浓厚的烟雾,也就是颜色较深、浓度较高情况下烟雾识别较为准确,适用于工厂、森林等情况下的烟雾识别。算法时间复杂度较低,运算时间较快。 图9 烟雾识别结果Fig.9 Smoke recognition results 小波变换识别烟雾的方法适用于烟雾运动轨迹明显、背景差异较大的情况下,适合街道、商场等烟雾运动特征明显的区域。算法时间复杂度较颜色特征识别高,要求高清图像,相应的检测时间也会变长。两种方法的具体比较见表1. 表1 两种识别方法比较 1)针对数字图像处理的烟雾颜色特征识别,达到了识别检测火灾的目的。 2)利用两种方法的具体过程,进行了烟雾检测的对比分析。将彩色图像转化为灰度图像并进行二值化处理,在检测图像特征阈值的过程中,通过阈值比较,保留疑似烟雾区域,得到烟雾区域轮廓。小波变换通过捕捉均值背景图像在信号域上的衰弱点来识别烟雾,在烟雾的特点上利用二维离散小波变换,对原始背景图像的纹理进行提取,判断纹理趋向模糊的原因,从而对烟雾是否存在进行检测。最后得出了两种方法不同的适用场景。 3)说明不同物质燃烧的不同阶段烟雾特征也会有所不同,文中只进行了共性分析。关于不同物质的分类烟雾特征研究,将作为进一步研究的方向。
4 仿真实验
4.1 烟雾颜色特征检测系统的实现



4.2 小波变换烟雾检测的实现

4.3 两种算法比较

5 结 论
猜你喜欢
汽车工程师(2021年12期)2022-01-17
小学阅读指南·低年级版(2021年3期)2021-03-19
现代电子技术(2021年1期)2021-01-17
当代陕西(2020年14期)2021-01-08
奥秘(创新大赛)(2020年7期)2020-07-27
华人时刊(2019年13期)2019-11-26
上海大学学报(自然科学版)(2018年5期)2018-11-02
电脑知识与技术(2018年35期)2018-02-27
当代陕西(2017年12期)2018-01-19
自动化学报(2017年11期)2017-04-04