
基于图像识别的锂离子电池正负极距离检测
2019-10-22 08:39王东昆彭劼扬王家海
制造业自动化 2019年10期
王东昆,彭劼扬,王家海,沈 斌
WANG Dong-kun1 , PENG Jie-yang2 , WANG Jia-hai2, SHEN Bin1
(1.同济大学 中德学院,上海 201804;2.同济大学 机械学院,上海 201804)
0 引言
锂离子电池通常在深度充放电的条件下使用,当电池已完全充满时,若再进行充电将会使锂离子持续地从正电极移动到负极,此时如果负极不能完全覆盖正极,就可能导致负极中没有足够的空间收纳锂离子,这样一来,锂离子就将以金属锂的形式沉积在负极的表面[1]。这种现象被称为析锂。由于析锂常常以树突状晶体存在,而这些晶体则有可能会刺穿锂离子电池隔膜,并最终对锂离子电池的安全造成隐患[2],严重时可能导致电池短路爆炸等重大安全事故。此外,如果锂离子电池的负极未能完全覆盖正极,还会使得电池中的锂未能被充分利用,造成活性锂损耗。因此,在电池的组装流程中,必须对电池的内部结构进行检查,以确保负极覆盖整个正极。
当前的锂离子电池质量监测方法主要可以分为超声波扫描、接触电阻扫描和发光检测四种。超声波检测[3]的原理为通过压电传感器,向电池施加特定频率和振幅的超声波,通过声波数据分析得知内部缺陷信息。该方法具有无损、效率高的特点,但灵敏度不高。如图1(a)所示为电池的超声波裂缝检测结果;接触电阻扫描[4]根据电势分布数据检测电池覆盖情况,因而检测精度较高、但耗时较长、且具有一定破坏性,如图1(b)所示;透视检测法[5,6]通过X射线获得电池的内部结构图像,并利用图像识别方法检测电池故障,具有快速、可在线检测等优点。

图1 超声波共振检测结果与触电阻扫描检测结果图
因此,鉴于超声波扫描和接触电阻法的各自缺陷,本文拟采用透视检测法评估锂离子电池的正负极覆盖状况,从锂离子电池的CCD图像中提取出电池正负极边缘的位置信息。
1 锂离子电池自动检测总体方案设计
透视检测法本质上是基于图像识别的检测方法,在图像识别的应用领域,杨芳[7]等应用智能图像识别技术,解决了传统的机针质量检测依靠人眼判别的缺陷。王志秦[8]针对生物特征识别系统中的人耳识别,应用数字信号处理器构建人耳图像识别系统,利用摄像机和高速数字信号处理技术,完成人耳图像采集、特征提取和识别。廖健君[9]等设计了一种基于BP神经网络的铆接位置图像识别方,该方法能较准确地识别出该大型设备制动杠杆在组装过程中铆枪铆接时的位置。
本文所研究的锂离子电池由15组电池的正负极组成,所有的正极都比负极长5毫米和宽5毫米。为了检测锂离子电池中电极的重叠状态,本文采用了VISCOM X射线系统来获取锂离子电池内结构的X射线图像。如图2中的X射线图像采集示意图所示,X射线成像系统从X,Y,Z三个方向采集锂离子电池一角的X射线图像,通过调整X射线的波长,可以获得X,Y,Z三个方向的锂离子电池深度图像,从而为分析锂离子电池结构提供了多个角度以及深度的图像信息。

图2 X光成像示意图
通过此方法获取的X,Y,Z方向的锂离子电池图像如图3所示。

图3 X、Y、Z方向的锂离子电池图像
图3中,在X方向图像的下半部分,有一些半透明的轮廓,这些轮廓是电池的铝箔封装。在锂离子电池的图像中,存在两种电极,较长的电极为正极,短的是负极。而夹在电池极片中间的半透明线段则为电极隔膜,用于隔开正负极,其在图像中也呈半透明状。在Y方向图像中几乎看不到电池的封装轮廓。而在Z方向图像中,存在三种轮廓,其中最大的为电池正负极隔膜,其次则为电池的负极以及正极。
当使用X射线成像系统对锂离子电池进行图像采集时,所采集到的图像序列可以分为三个区域,如图4所示。其中灰色区域为锂离子电池的边缘区域,在该区域中缺少负极部分的图像,因此不能为评估锂离子电池正负极覆盖率提供充足的信息。绿色区域为目标区域,此区域中锂离子电池正负极距离保持恒定。红色区域则是锂离子电池的圆角区域,由于该区域中正负极的距离随着X射线在锂离子电池的深度变化而变化,因此该区域中的图像序列不能提供正确的电池正负极距离信息,即圆角区域中的图像应当避免用于锂离子电池正负极覆盖率评估。
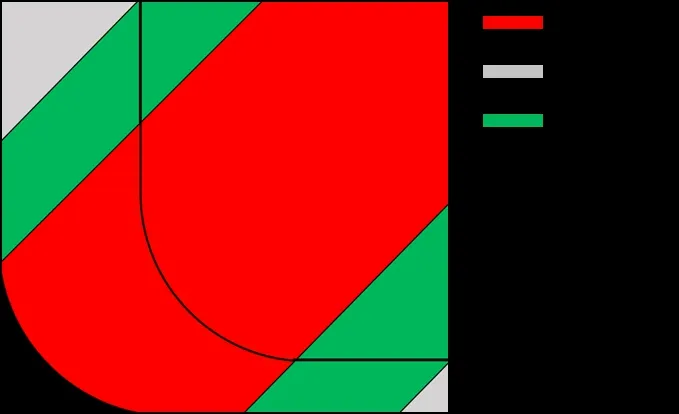
图4 X射线成像区域
通过以上分析得知,锂离子电池的X射线图像序列有以下几个特征:
1)并非所有图像序列都能提供正确有效的信息,需要对图像序列中的图像进行筛选;
2)在对锂离子电池极片进行提取时,应当能实现对电池正负极的区分,并且为了实现更高的检测准确率,应当降低无关特征在图中的对比度;
3)锂离子电池X射线图像获取时X射线与锂离子电池边缘成一定的角度,需要提取出该角度以计算锂离子电池正负极边缘实际距离;
4)完成电池正负极边缘距离计算以及覆盖率的计算之后,应当对异常数据进行去除,并导出正确数据。
基于锂电池图像的以上特征,本文将锂离子电池的正负极覆盖率计算归纳为以下四个步骤:自动图像选取、电极边缘点在图中的位置提取、电池极片正负极距离的计算和正负极覆盖率的计算,并设计详细流程如图5所示。
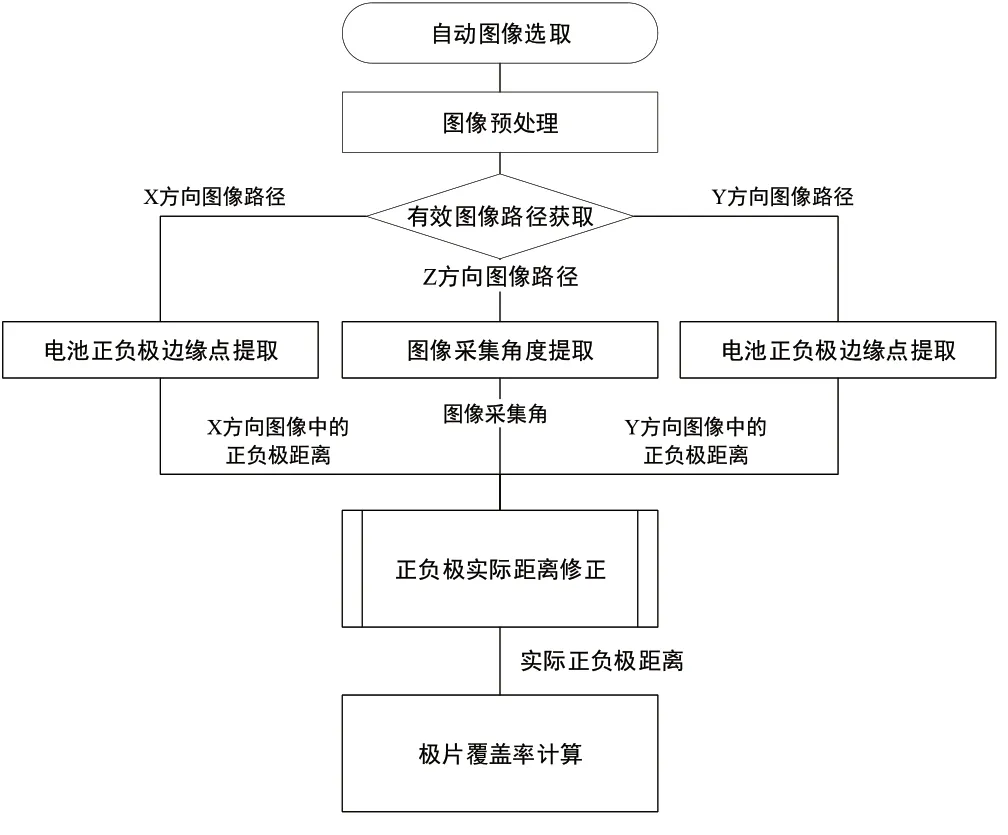
图5 电池正负极距离以及覆盖率检测流程图
2 锂离子电池正负极距离检测
2.1 图像预处理
图像预处理是图像识别的准备步骤。其目的是为了改善图像数据,抑制不必要的噪声或增强某些特征[10]。在电池X射线图像中,电极隔膜和铝箔封装与电池电极的图像混合在一起,可能会对电极边缘点检测的准确性产生影响。因此,应当先对电池的X光图像进行预处理,消除图像中的铝箔封装,以便后续检测过程的进行。
由X射线图可知,图像中的所有的铝箔封装在右侧部分聚拢,如图6所示。在此基础上,可以通过对图像右侧部分的灰度直方图进行分析,以提取铝箔封装的灰度,图6的灰度直方图如图7所示。

图6 铝箔封装在锂离子电池X光图像中的特征
接着对锂离子电池X光图像中的铝箔灰度值进行估计,并采用灰度拉伸操作去除铝箔封装。将图7的X光图像中的灰度信息代入式(1),以移除图像中的铝箔。

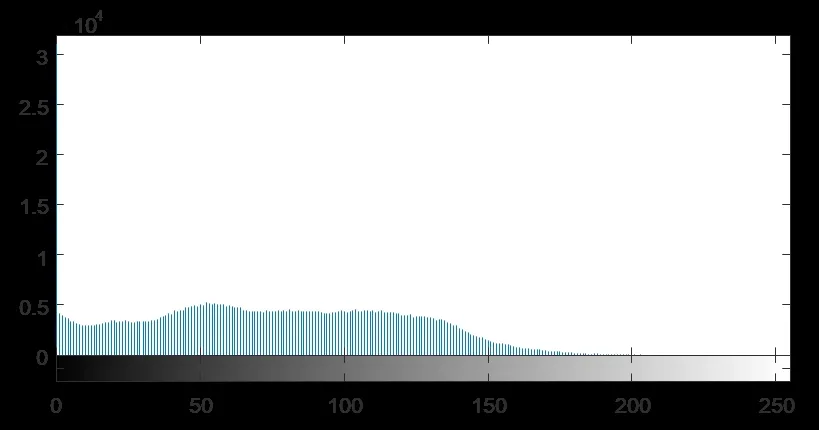
图7 锂离子电池X光图像的灰度直方图
式中G(x,y)是灰度调整后的像素灰度,f(x,y)是灰度调整前的像素灰度。将图中提取出的铝箔封装的灰度替换为方程1中的Imin,即可完成对X射线图像中的铝箔封装和电极隔膜的消除。图像预处理的效果如图8所示,可以清楚地看到,X射线图像中的铝箔封装被完全去除,电极不再与电极隔膜混合。
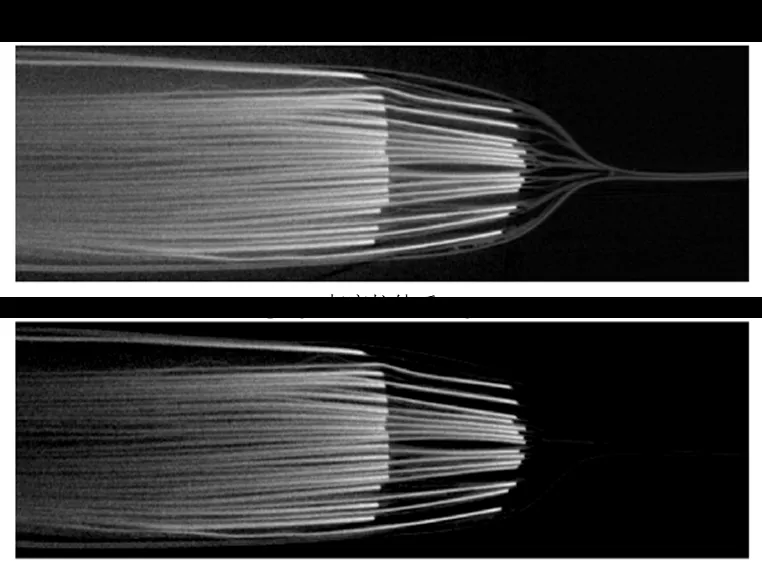
图8 灰度调整后的锂离子电池X光图像
2.2 正负极区域分割
电池图像的关键区域是正极区和负极区域,在灰度值调整后,其列向的平均灰度如图9所示,从右向左能看到有两个灰度的突变区域,这两个突变点分别对应了正极边缘和负极的边缘的位置。
基于此特征,对图像关键区域的提取可以通过识别这两个灰度突变的位置来实现。本文采用阈值法,分别从图像的右边向左边搜索,所搜索到的第一列平均灰度大于10的列为电池负极边缘的起始列,所搜索到的第一列灰度值大于图中最大灰度的80%的列被定为电池正极边缘。通过上述方法,从图中提取出的锂离子电池正负极关键区域如图10所示。

图9 锂离子电池X射线图像列向的平均灰度如图

图10 锂离子电池正负极区域
2.3 角点检测法提取锂离子电池正负极边缘
角点是指图像像素局部标准差最大值的点[11],角点检测通常是对于能表示图像的基本特征的点的检测,或者是对于图中能较容易地被检测到或对于噪音具有较高的稳健性的点的检测。本文采用了三种角点检测算法:Harris角检测算法、Shi-Tomasi角点检测算法与USAN角点检测算法,并对比分析其效果。
在Harris角点检测法[12]中,每个像素的标准差的总和是以一个特定的方向计算的,因此其计算效率较高。此外,Harris角检测算法对二维平移或旋转以及少量的光照变化和微小的视角变化不敏感。
Shi-Tomas角点检测算法是通过计算图像中局部结构矩阵的特征值,当局部区域的最小特征值大于给定阈值时,则检测到一个角点[13]。然而,在Shi-Tomasi角点检测算法中,需要进行矩阵分解,效率较低。
SUSAN角点检测算法是利用角响应函数(CRF)计算相似像素的个数。如果相似的像素的数量是局部极大值,则核子的位置被考虑作为一个角点[14]。SUSAN探测器在转角定位方面具有良好的可靠性和准确性,对噪声也极不敏感,但在模糊图像上表现不佳[15]。
由图10可知,电池极片边缘点的大小约为6~7像素,因此在角点算法中,采用7×7的掩模来估计掩模中心与掩模中其他像素之间的相似性。针对Harris角点检测算法和Shi-Tomasi角点检测算法,本文选取了所检测出的最强的25个角点,针对SUSAN角检测算法,对用于相似性估计的像素亮度差的阈值设置为50。使用上述三角检测算法确定正极和负极边缘的结果如图11所示。
统计上述角点检测的正确检测以及误检测结果之后,得出的这三种角点检测算法的准确率如表1所示。

表1 三种角点检测算法的准确率
从表1中可以看出,Harris角检测算法精度最高,而SUSAN角点检测的准确率相对较低。而对于Shi-Tomasi角点检测算法,其必须对特征矩阵的特征值进行计算,而对于哈里斯角检测算法,只需要计算出特征矩阵的的行列式和迹的值,因此,Harris角点检测算法的计算效率比Shi-Tomasi角点检测算法更高。综上所述,本文选择了Harris角点检测算法对电极边缘点进行检测。
2.4 锂离子电池正负极实际距离校正
由于X和Y方向图像来自同一个电池单元,因此从X和Y方向提取出的电池正负极之间的距离应该是一致的。但是,通过对X和Y方向图像的分析发现,从X方向图像中提取的窄边的电池正负极距离总是大于从Y方向图像提取的电池正负极距离,而在宽边上的距离则是相反的情况。发生以上现象的原因是,图像采集过程中可能存在一定旋转角度,从而导致从Y方向图像提取的距离比原始距离短,而从X方向图像的提取的距离更长。
为了校正X方向和Y方向图像的距离,需要提取图像采集角。由于Z方向图像包含电池组和电极轮廓的信息,因此图像采集角可以从Z方向图像中提取。从Z方向提取图像采集角度分为三步:
1)将Z方向图像转换为边缘(轮廓)图像;
2)检测边缘图像中的直线;
3)将检测到的直线的斜率转换为图像采集角。
首先需要将Z方向图像转换为边缘图像,以便去除图像中的无关信息,只保留边缘(轮廓)。本文采用了三种常用的边缘检测算法:Sobel边缘检测算子、Roberts边缘检测算子和Canny边缘检算子,上述三边缘探测器的边缘检测结果如图12所示。

图12 三种边缘检测方法效果图
由于Sobel边缘检测算子以及Roberts边缘检测算子是通过对图像进行卷积进行的,而Canny边缘检测算法则是一个多步骤的算法,因而相对于Canny边缘检测算法,采用Sobel以及Roberts边缘检测算子对图像进行边缘提取在计算效率上更具优势。然而从以上三图的边缘检测结果对比可知,虽然Roberts边缘检测算子在抑制噪声方面比Sobel边缘检测算子更有效,在Roberts边缘检测算子所产生的边缘图中,仍然能明显地看到其边缘中所包含的许多断点。在此方面,Canny边缘检测算法在对边缘进行检测以及保留边缘方面具有明显的优势,从图12中能看出,Canny边缘检测算法所检测出的图像边缘更为完整,只存在轻微的噪声。因此,本文将采用Canny边缘检测算法对图像的边缘进行提取。
最后需要检测边缘图像中的直线,并将检测到的直线的斜率转换为角度。本文利用霍夫变换对图像中的线进行检测,直线检测范围限制在30°~60°。直线线检测和角度转换的结果如图13所示。
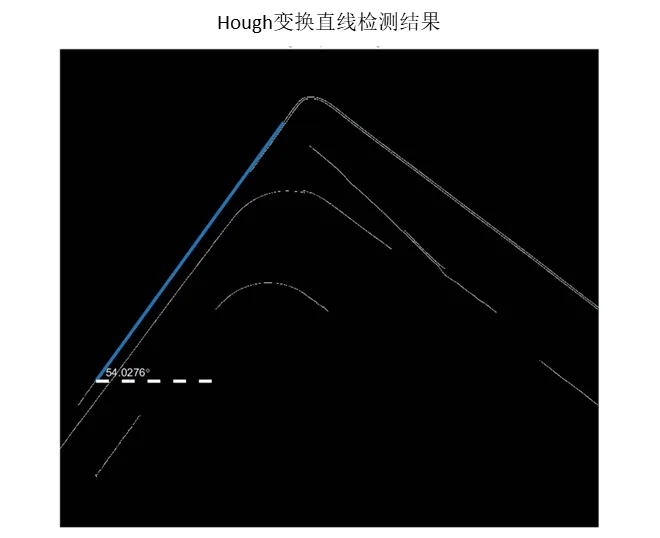
图13 Hough变换检测直线结果
在完成对锂离子电池图像采集角的提取之后,可以利用此角度以计算锂离子电池中正负极边缘的实际距离。计算公式如下:
窄边方向的电池正负极距离:

宽边方向的电池正负极距离:

式中θ是电池图像获取角度,Dx和Dy则是从X和Y方向电池图像中提取出的正负极片距离
3 结果分析
每个锂离子电池具有15对正负极,且各正负极片都是双面涂布,因此一共能提取出29个锂离子电池正负极距离值。经过校正,从X方向与从Y方向X射线图像中提取出的锂离子电池正负极距离分布如图14所示。

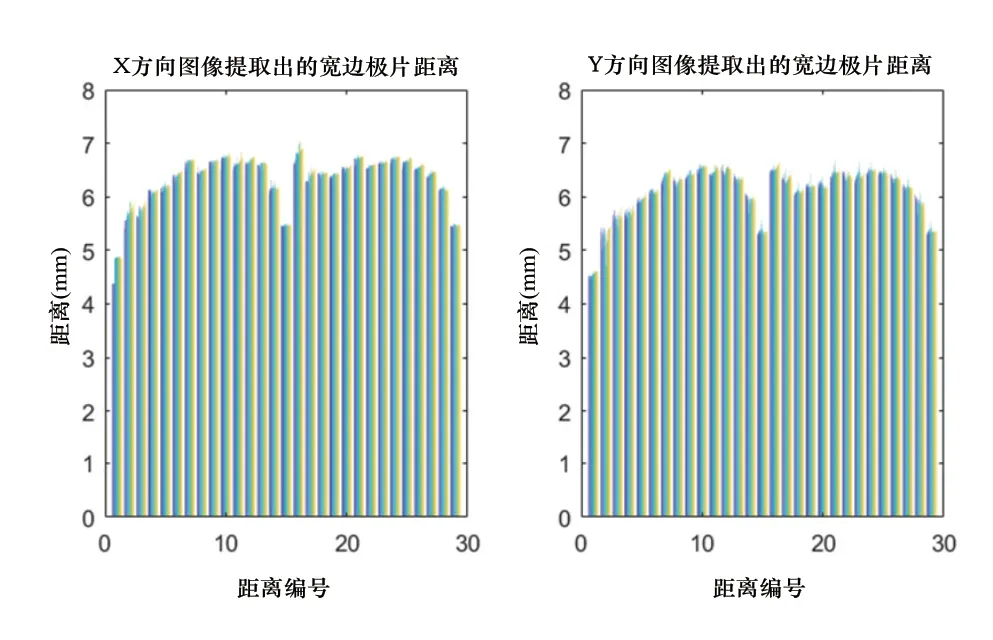
图14 从X和Y方向图像中提取出的锂离子电池正负极距离
通过对比,从X方向图片以及从Y方向图片提取的锂离子电池正负极距离一致性较高,为了验证正负极距离提取方法的稳定性以及一致性,本文一共从三个电池的X射线图像中提取出了所有正负极距离,并采用以公式4计算其正负极距离的平均重复性误差:

其中,σ为标准差,x为采用本文图像处理方法检测出的电池极片之间的距离。
三个电池的正负极片距离的平均重复率如表2所示。

表2 所提取出的电池极片距离的平均重复率误差
除了从X方向图像中提取的窄边距离外,所提取出的锂离子正负极距离重复性误差均在0.96%~2.16%范围内,而从X方向图像中提取的窄边距离的重复误差相对较差的原因是,采集该部分图像时X射线发生器与X射线接收机之间的距离较短,导致图像具有更多的噪声和模糊的边缘。因此,从X方向图像中提取窄边距离的一致性受其影响从而相对其他方向的重复率更低。
此外,为了验证上述方法对不同方向的X射线图像的检测一致性,本文分别计算了由X和Y方向电池图片中提取出的各极片之间的距离的相对误差,其结果如表3所示。
从表3中可以发现,同一电池分别从X、Y方向图片中所提取出的正负极片距离的平均相对误差都相对较小,宽边上的正负极距离相对误差仅仅占其边长的0.1%不到,而窄边上的正负极距离相对误差也仅仅约为0.2%,这表明从X和X方向图像中提取距离的一致性满足要求。

表3 从X、Y方向电池图片中所提取出的电池极片距离的平均相对误差
最后,为了验证该方法的检测精度,本文对所分析的三个锂离子电池X射线图像进行了抽样,并图中电池正负极之间的距离进行手动测量。通过将其与文中自动提取出的距离进行对比,得到本文提取锂离子电池正负极距离的绝对误差,如表4所示。
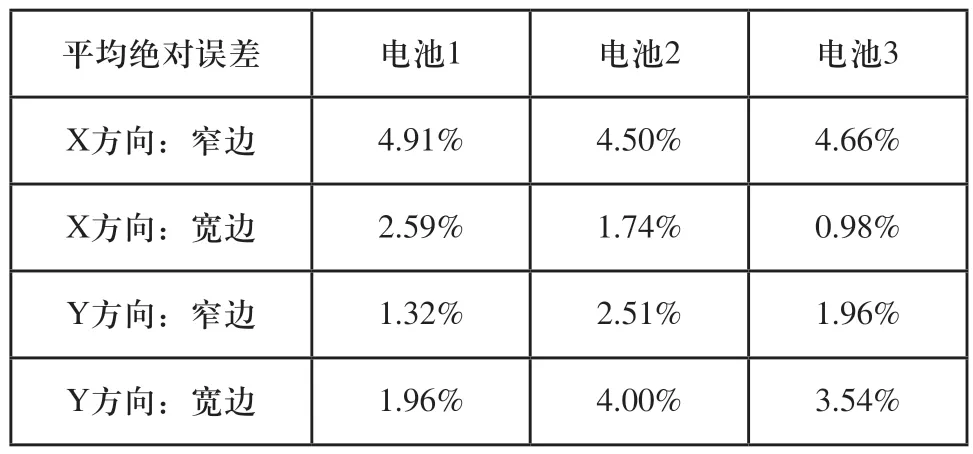
表4 所提取出的电池极片距离的与实际电池极片距离的平均绝对误差
与电池的重复性误差相似,从三个电池中所提取出的窄边上的电池正负极距离的绝对误差也相对较高,原因同样是由于在窄边上的X方向X射线图像较为模糊,导致本文所提出的方法的准确性较低。而其他方向上所提取出的电池正负极绝对误差相对较小。
4 结语
本文主要研究了应用图像处理技术从锂离子电池X射线图像提取出电池正负极覆盖率。首先,并介绍了本文所采集的锂离子电池X射线图像。接着,根据锂离子X射线图像的特征,对实现锂离子电池的自动检测进行了总体设计,确立了锂离子电池X射线图像处理的四个基本步骤:自动图像序列选取,正负极边缘点检测,正负极距离校正,锂离子电池的正负极覆盖率计算以及相关数据导出。其次,阐述了三种角点检测算法的优缺点及其使用场合,提取电池正负极边缘,并进行实际验证。最后对结果进行误差分析并给出误差原因。
本文的研究虽然可以较准确地提取出电池极片覆盖率的信息,但未就电池性能与电池极片覆盖率的关系进行进一步探讨,因此下一步深入研究将继续发掘电池装配过程中可能影响电池性能的其他因素,例如:电极之间的间隙,电池电极的涂布方法,涂布的总面积等,为建立电极装配过程对电池性能影响的理论模型提供有用的信息。
猜你喜欢
北京航空航天大学学报(2022年5期)2022-06-06
汽车工程师(2021年12期)2022-01-18
汽车工程师(2021年12期)2022-01-18
计算机仿真(2021年8期)2021-11-17
科学(2020年1期)2020-08-24
计算机系统应用(2020年1期)2020-01-15
电子技术与软件工程(2019年9期)2019-07-12
读天下(2018年14期)2018-09-05
电子技术与软件工程(2018年10期)2018-07-16
今日中国·中文版(2017年10期)2017-10-25
