
一种地下空洞三维激光扫描仪的设计与应用
2019-11-22 08:48楼加丁杨新明
陕西水利 2019年10期
丁 朋,楼加丁,杨新明
(中国电建集团贵阳勘测设计研究院有限公司,贵州 贵阳 550081)
0 引言
溶洞、采空区等地下空洞会对水利水电、市政、交通等工程的建设造成威胁,因此对地下空洞的精确探测也更加迫切。地下空洞探测对于填充工程施工中遇到的地下溶洞、消除地下采空区安全隐患、分析地质构造等具有重要意义。
常见的地质探测手段包括电法、瞬变电磁、探地雷达、地震反射探测、地质钻探、钻孔电视等[1],这些常规探测手段能够找到地下空洞的大致位置,但是无法或者很难确定地下空洞的大小、形状和走向。由于地下空洞普遍存在高温、高湿、空间狭小、可视性差、通讯信号差、危险性大等情况,人员根本无法进入或者由于安全原因不宜进入,无法实施人工接触测量,因此也就无法确定地下空洞的大小、形状和走向。
三维激光扫描技术克服了传统测量的局限性,具有快速、无接触、精度高、主动性强及全数字特征等优点[2~5]。地下空洞三维激光扫描系统能够对地下空洞的内部结构实施精确测量,但是技术实现较为复杂,目前,国内外能够对地下空洞的内部结构进行三维精确扫描且效果良好的装置,仅有Optech公司的CMS系列空区三维激光扫描系统和MDL公司的C-ALS地下洞穴三维激光扫描系统[1]。上述系统由于价格昂贵,技术壁垒严重,很难在国内普及应用。本文设计了一种简易的探测地下空洞三维结构的激光扫描装置——LS-1地下空洞三维激光扫描仪,该装置结构简单、操作方便、性能稳定,实现了对溶洞、采空区等地下空洞的自动化扫描,利用采集到的点云数据,可以较为准确地计算出地下空洞的几何形态,为工程设计、施工和评价提供可靠的基础资料。
1 实现原理
1.1 激光的特点
激光具有普通光所完全不具备的四大特性[6]:
(1)定向发光。普通光源向四面八方发光,而激光的发光方向可以限制在0.001弧度立体角内,接近水平。
(2)亮度极高。激光是当代最亮的光源,尽管激光的总能量并不一定很大,但能量高度集中,激光的亮度与阳光之间的比值是百万级的,而且它是人类创造的。
(3)单色性好。光首先是一种电磁波,光的颜色取决于它的波长。普通光源发出的光通常包含着各种波长,是各种颜色光的混合,而激光的波长只集中在十分窄的光谱波段或频率范围内。
(4)相干性好。干涉是波动现象的一种属性,基于激光具有高方向性和高单色性的特性,相干性极好。
1.2 实现原理
地下空洞三维激光扫描技术的核心是扫描位置驱动、距离测量和方位测量。在进行实际测量作业时,三维激光扫描仪对地下空洞的某一处洞壁发射窄束激光脉冲,之后计算激光脉冲从发出到经被测洞壁表面反射回仪器所用的飞行时间,再计算出待测距离(见图1),同时辅助以电子罗盘、陀螺仪或倾角传感器等方位测量模块,实时记录、计算发射出去的窄束激光脉冲在水平与垂直方向上的角度值,以获得某一点的三维相对坐标。在电机的驱动下自动扫描空洞的内壁,最终获取整个空洞的三维点云数据[1~3,5~7]。
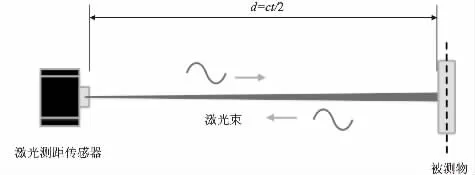
图1 激光测距原理示意图
2 设计思路
LS-1地下空洞三维激光扫描仪总体设计框架见图2。
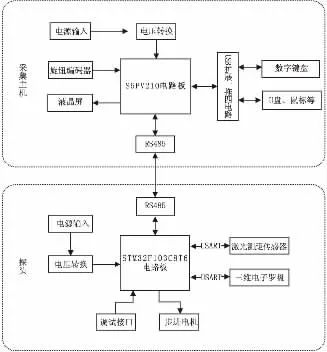
图2 系统总体设计框架
系统主要分为井上采集主机和井下探头两部分,采集主机电路使用基于ARM CortexTM-A8内核的S5PV210处理器,采集软件基于WinCE6.0下的MFC框架设计,主要由人机交互、通信、数据采集与显示、文件读写、数据处理五大功能模块组成。探头主要由STM32控制板、集电环、步进电机、激光测距传感器、三维电子罗盘、不锈钢金属外壳等组成,其中激光测距传感器用来测量激光束发射点到洞壁之间的距离,最大探测距离30 m以上;三维电子罗盘与激光测距传感器固定在一起,用来定位激光束的发射方向;步进电机用来驱动激光测距传感器与三维电子罗盘一起水平360°旋转。绞车主要由手柄、传动装置、停止器和电缆线等组成。采集主机和探头之间采用RS485数字通信方式。
3 系统简介
LS-1地下空洞三维激光扫描仪是一套钻孔式地下空洞三维激光扫描系统,克服了传统测量技术的局限性,采用非接触主动测量方式来直接获取高精度的三维数据,能够对空洞内壁进行从上到下(或者从下到上)逐层水平360°自动化扫描,具有精度高、实时性强、安全性高等特点,系统结构简单、使用便捷,实现了对工程勘察、施工过程中遇到的地下空洞的几何形态的无接触式精确测量。系统主要由地面采集主机、探头、绞车、孔口滑轮、连接线(连接绞车和采集主机)等组成,实物见图3。

图3 LS-1地下空洞三维激光扫描仪
(1)探头:在采集主机的指令控制下,实现对水平断面轮廓的360°全周扫描,并将扫描生成的点云数据传回至采集主机。
(2)采集主机:用于数据采集、断面轮廓显示、数据管理等。采集主机工作界面见图4。

图4 采集主机工作界面
(3)绞车:用于收放探头,并与连接线一起实现采集主机与探头之间的通信连接。
(4)附属设施:包括井口滑轮、连接线等。
4 使用方法
系统工作示意图见图5。

图5 系统工作示意图
系统采用非接触式激光测距方式,从上到下(或者从下到上)按照设定的角度间隔逐层水平360°扫描一圈获取空洞的轮廓点云,每个扫描断面最多可采集3600个点云数据,以保证轮廓的还原精度,同时软件支持单点复合采集,即一周采集完之后,用户可以通过采集软件的轮廓预览功能模块判断某些采集值是否异常,如果有异常,经过简单的设置,系统可以通过旋转电机将激光测距传感器和三维电子罗盘定位到这些采集点重新进行测量,待整个空洞扫描完毕之后,再利用室内三维建模处理软件生成三维模型,计算出空洞的大小、形状和走向。
采集时系统工作流程见图6,采集过程主要遵循以下八个步骤:
第1步:参数设置;
第2步:放置探头到某个位置;
第3步:根据情况修改参数;
第4步:根据情况对仪器校准;
第5步:数据采集;
第6步:对部分数据复核重采;
第7步:数据存盘;
第8步:循环执行上述步骤2~7,直至地下空洞内部结构扫描完毕为止。
注意采集过程中,务必保持探头不动。

图6 系统工作流程图
5 工程应用
某水电站为Ⅱ等大(2)型工程,工程枢纽由碾压混凝土重力坝、坝身溢流表孔、左岸引水系统、左岸地下厂房及右岸预留通航建筑物等组成。电站装机容量558 MW(3×180 MW+1×18 MW),保证出力97 MW,多年平均发电量15.61亿kWh。水库正常蓄水位585 m,死水位580 m,正常蓄水位以下库容1.365亿m3,调节库容0.307亿m3,水库具有日调节性能。
电站在进行右岸上层帷幕幕墙灌浆施工过程中,钻孔SCWM-ZK-9在钻孔施工过程中发现岩溶(钻孔过程当中发生落钻5m现象),为研究落钻区域岩溶特征,采用了LS-1地下空洞三维激光扫描仪进行探测,根据以钻孔为中心的可测试范围内扫描采集数据绘制了可测区域岩溶走向(图7),确定溶洞走向为近东西向,且东小西大,东高西低。根据数据体模拟可测区域外边界推算岩溶体积,三维立体显示溶洞呈“胃”状,估算体积约150 m3(图8)。为电站帷幕提供了设计依据。
电站根据探测成果结合岩溶危害性,决定从中层灌浆廊道延长帷幕线揭露岩溶区,后经开挖揭露落钻区域岩溶高度4 m~6 m,宽度 4 m~7 m,长度 6 m~8 m,体积约为 150 m3,延伸方向近东西向,形体、走向与探测成果一致,三维激光扫描仪探测的溶洞精度完全满足要求。

图7 岩溶走向图

图8 岩溶区局部三维视图
6 结语
针对地下空洞三维结构探测的需求及工作中遇到的大量地下空洞(主要是溶洞)的特点,提出了一种简易钻孔式三维激光扫描仪的设计方案,并自主研发了LS-1地下空洞三维激光扫描仪,为验证整个系统的实际探测能力及工作效果,对某水电站右岸顶层岩溶区进行现场试验,试验结果表明采用该系统能够准确地探明溶洞的大小、形态和走向,为溶洞的后续施工处理提供了可靠的基础资料。
目前,系统还存在一些缺陷,如:无法实时观察洞内情况和只适用于非填充型地下空洞内部形态的探测等。下一步将尝试通过添加红外摄像功能、超声波测距功能等技术手段,使其更加完善,应用范围更加广泛。
猜你喜欢
现代仪器与医疗(2022年2期)2022-08-11
建材发展导向(2021年9期)2021-07-16
智慧少年·故事叮当(2020年5期)2020-08-17
作文成功之路·小学版(2019年6期)2019-07-12
模具制造(2019年3期)2019-06-06
通信电源技术(2018年5期)2018-08-23
制导与引信(2017年3期)2017-11-02
中国公路(2017年7期)2017-07-24
中国高新技术企业(2015年25期)2015-07-24
现代营销·经营版(2015年3期)2015-04-20
