
探讨榆林东线引黄工程测图控制网的建立
2019-11-22 08:48田睿
陕西水利 2019年10期
田 睿
(陕西省水利电力勘测设计研究院测绘分院,陕西 西安 710002)
1 工程概况
榆林东线引黄供水工程是从神木市境内黄河马镇取水,供水对象主要为榆林能源化工基地,解决其资源性缺水问题,以及工程沿线重要城市、县城、工业园区供水,缓解城市与工业发展、生态用水矛盾,为能源基地可持续发展提供可靠地供水保障。主要供水对象为窟野河河谷区、秃尾河河谷区、榆林经济开发区、榆横工业园及沿线城镇的生产生活用水。榆林东线引黄工程拟从黄河马镇年取水量为7.47亿m3,设计流量27 m3/s;工程规模为大(2)型,工程等别为Ⅱ等。工程由取水枢纽、170.4 km输水线路(另有29 km天然河道)、六级加压泵站及牛栏沟、黄石沟沉沙调蓄水库等四部分组成。其中输水线路包括106.1 km压力管道、45座建筑物(渡槽9座、倒虹10处、隧洞23条、暗涵3处)。
《水利水电工程测量规范》(SL 197-2013)[1]中11.4输水线路测量规定:基本平面控制测量等级不低于四等,基本高程控制测量等级不低于三等。在勘测阶段,主要工作是测绘带状地形图和定线测量,参考规范,最终确立控制测量方案,采用四等GNSS控制测量方法建立平面控制网,采用测量机器人自动观测三等三角高程方法建立高程控制网。
2 平面控制测量
基本平面控制布设为四等GNSS控制网。由《水利水电工程测量规范》[1](SL 197-2013)知:平面坐标系统应采用现行国家坐标系或与其相联系的独立坐标系,大比例尺地形图测绘中,需满足长度投影变形值不应大于5 cm/km;

式中:D1为归算到参考椭球面上的长度;D2为高斯平面上的边长;D为测距边水平距离;Hm为测距边两边的平均高程;hm为测区大地水准面高出参考椭球面的高差;RA为测距边所在法截线的曲率半径;ym为测距边两端点横坐标平均值;Δy为测距边两端点横坐标之差;Rm为参考椭球面上测距边中点的平均曲率半径。
经计算该测区两项投影长度变形值0.1 m,因此建立了挂靠在1980西安坐标系下的独立坐标系。
2.1 布网选点、埋石
基本平面控制布设为四等GNSS控制网。沿线路每隔4 km~5 km左右埋设一组(每组3座)混凝土标石,每组点间两两互相通视。主要建筑物处(泵站)每处埋设2座混凝土标石。每组GNSS点间距大于500 m。平面控制埋石点与高程控制点共用。
根据四等GNSS要求埋设了混凝土标石并填写了GNSS点之记,GNSS点编号为DXi(i=01,02,…,161)。新布设的GNSS点与测区附近国家 B级 GNSS点 1293、1294、1296、1298、1299 及C级 GNSS点 F014、F017、F018、F019、F020、F022、F024 共同构成四等GNSS网。图1为GNSS控制网图。

图1 GNSS控制网图
2.2 GNSS观测
2.2.1 使用仪器
采用16台华测X900双频GNSS接收机,GNSS接收机均按规定通过检定,并在有效期内使用。
2.2.2 观测要求
1)静态方式。作业前根据测区地形和交通情况及设备性能等因素综合考虑,制定合理、详细的GNSS外业观测计划。
2)基本技术精度
GNSS网的主要技术精度要求见表1。

表1 GNSS网的主要技术精度
3)外业观测的主要技术要求见表2。
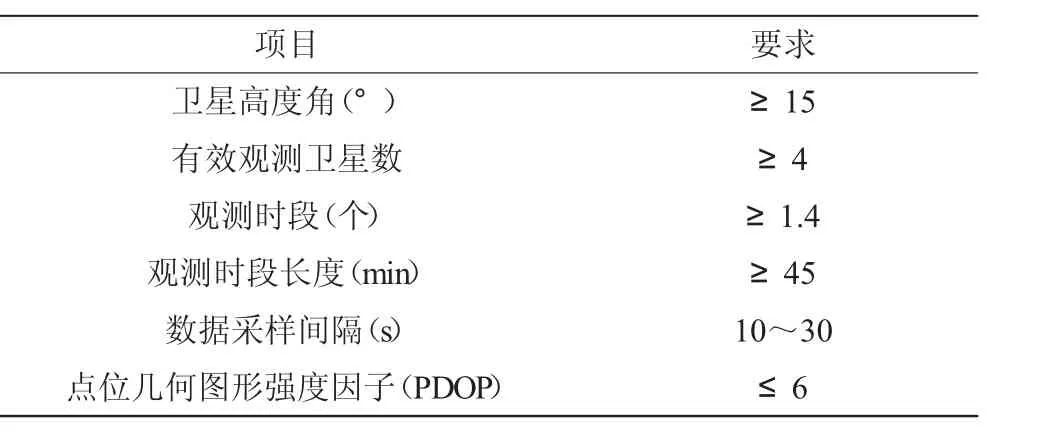
表2 外业观测的主要技术要求
2.3 数据处理
2.3.1 使用软件
GNSS网基线向量的解算采用华测GNSS自带后处理软件CGO(CHC Geomatics Office),平差采用 CosaGPS 软件进行[2]。
2.3.2 基线质量检验
GNSS网数据处理前进行了单条基线解算结果的检验、复测基线差值的检验、同步环、异步环各坐标分量及环线全长闭合差的检验。
1)重复基线测量的差值均小于规范规定的限差,其最大差值见表3。

表3 重复基线测量最大差值统计表
2)同步环各坐标分量及环线全长闭合差均小于规范规定的限差,其最大闭合差统计见表4。
3)异步环坐标分量及环线全长闭合差均小于规范规定的限差,其最大闭合差统计见表4。

表4 同步环各坐标分量及环线全长闭合差最大值统计表
2.3.3 GNSS网平差
1)在各项质量检验符合要求后,以所有独立基线组成GNSS空间向量网,并在WGS-84坐标系统中进行三维无约束平差。平差后,基线向量改正数最大值为:VDx=10.69 cm、VDy=-3.52 cm、VDz=-4.85 cm,小于限差68.34 cm;最弱点点位中误差为1.38 cm;最弱相邻点边长相对中误差为1/161000。
2)1980西安坐标系统下的二维约束平差。以国家B级GNSS 点 1293、1296、1299 和 C 级 GNSS 点 F017、F018、F020、F024的1980西安坐标系下的平面坐标为起算数据,进行二维网约束平差。平差后最弱点点位中误差为0.39 cm;最弱相邻点边长相对中误差为1/237000。
3)挂靠在1980西安坐标下的独立坐标系统建立[3~4]。以DX50为坐标起算点,以DX50~DX53的方位角为起始方位,投影面高程为1150 m,进行二维约束平差,平差后最弱边相对中误差1/216000,小于规范规定的1/40000;最弱点点位中误差为6.1 mm,小于限差5 cm。
独立坐标系坐标反算边长与实测边长比较,在测区的两端及中部实测了9条边,精度统计表见表5。
3 高程控制测量
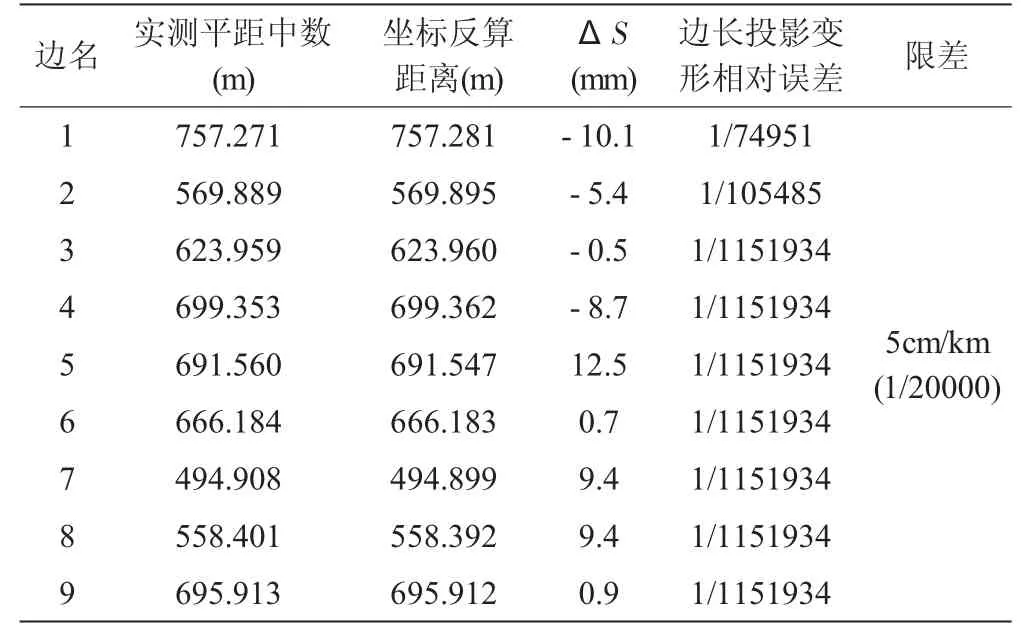
表5 独立坐标系坐标投影差计算表
3.1 高程路线布设
以国家水准点Ⅱ头兴54-1、Ⅱ头兴56-1,国家B级GNSS点1294、1296(二等水准高程)为起闭点,联测四等GNSS点,布设成节点网三角高程线路。
3.2 观测
使用一台Leica TS60、一台Leica TCA2003型全站仪,TS60为全新一代智能全站仪,TCA2003为测量机器人,均可加载多测回自动观测软件,实现自动寻找目标与照准、自动观测、自动记录、自动检测各项限差[5]。配套设备有:温度计(读数精确至0.2℃),气压计(读数精确至50Pa),游标卡尺(测量仪器高和觇标高)。仪器与配套设备均检定合格,且在有效检定期内。采用单程双测对向观测的方法进行施测,观测技术要求见表6。

表6 三角高程测量技术要求
3.3 数据处理
1)外业验算
对测距边进行仪器加乘常数、气象数据、倾斜改正之后计算平距、往(或返)测观测高差,进行单程双测高差较差、对向观测高差较差、边长往返较差及高程线路闭合差均满足表7中相关规定。

表7 三角高程测量限差要求
2)平差计算
平差采用《工程测量控制网平差系统(NASEW)》软件,观测高差值进行了正常水准面不平行改正,根据单程双测两次观测高差不符值计算每千米高程线路偶然中误差MΔ=±2.51,小于±3.0 mm,符合规范要求,见表8。
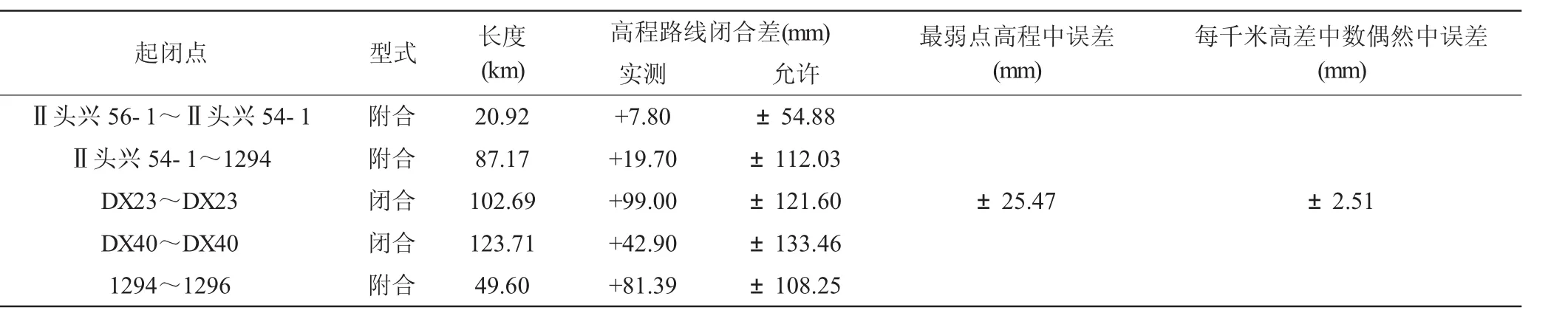
表8 三角高程测量精度统计表
4 结论
该项目测图平面控制网布设为四等GNSS网,建立的挂靠在1980西安坐标系下的独立坐标系有效的抵偿了两项投影改正(高程归化和投影改化),实测边长与坐标反算边长满足了投影变形值5 cm/km(1/20000)的要求,最弱点定位中误差±6.1 mm。
项目地处榆林毛乌素沙漠范围,水准测量难以实施,因而采用了三角高程测量方法建立了测图高程控制网,观测过程中采用了最为先进的0.5″级测量机器人LeicaTS60和LeicaTCA2003,有效的减小人为操作带来的误差,提高控制网的测量精度。最弱点高程中误差±25.47 mm,每千米高差中数偶然中误差±2.51 mm。
地形图测绘和定线测量阶段对平面和高程精度要求为:平面±5 cm;高程为±5 cm(±h/20,h为基本等高距),因此本次测图控制网的坐标和高程测量精度满足该项目勘测阶段地形图测绘和定线测量的要求。
猜你喜欢
小学生学习指导(中年级)(2021年10期)2021-11-01
科学(2020年5期)2020-11-26
科学(2020年3期)2020-01-06
中国惯性技术学报(2019年3期)2019-10-15
学苑创造·B版(2019年6期)2019-07-12
电子制作(2017年7期)2017-06-05
舰船电子对抗(2016年5期)2016-12-13
中学数学杂志(高中版)(2015年3期)2015-05-28
浙江理工大学学报(自然科学版)(2015年5期)2015-03-01
太空探索(2014年1期)2014-07-10
