模糊PID控制器的设计
2019-11-27 02:40李珍珍朱浩铭
通信电源技术 2019年11期
李珍珍,朱浩铭
(1.广西大学 电气工程学院,广西 南宁 530004;2.南宁学院 机电与质量技术工程学院,广西 南宁 530200)
1 PID控制器的结构与原理
PID控制算法中P(Proportional)指的是比例环节,其作用是将控制系统中产生的偏差信号成比例地反映出来,以达到当偏差一旦产生就可进行控制;I(Integral)指的是积分环节,其作用是消除系统静差并提高系统的无差度;D(Differential)指的是微分环节,其作用是加快系统的动作速度,减少调节时间[1]。
PID控制器作为一个常见且应用广泛的线性控制器[2],其结构如图1所示。
2 模糊控制的原理与模型
模糊控制是一种智能控制,其结构上的组成类别和计算机控制系统有一定的相似性,类同于常见的离散控制系统[3],其模糊控制系统的结构如图2所示。

图1 PID控制器的结构图
基于模糊控制的系统组成主要有4部分。

图2 模糊控制系统的结构图
(1)输入/输出的接口装置,常用的是模/数(A/D)、数/模(D/A)转换。对于输入装置中使用A/D转换,目的在于使控制器可以通过接口获取离散信号;对于输出装置中使用D/A转换,目的是将离散信号转换为连续信号,便于送达于下位机,并控制被控对象。除了常见的A/D、D/A转换外,还会使用电平转换装置等。
(2)模糊控制器是实现模糊控制技术的关键核心部分。
(3)广义上的被控对象包括被控对象和下位机执行机构。
(4)传感器的作用是将不易检测的物理信号转化为容易检测的电信号,并传输回上位机,形成一个闭环回路,构成闭环系统。
模糊控制器的内部结构[4]如图3所示。

图3 模糊控制器的结构图
模糊控制器可简单区分为一维控制器、二维控制器、三维控制器以及多输入的多维控制器等,一到三维的模糊控制器的结构以及输入与输出之间的关系如图4所示。

图4 一到三维的控制器结构
3 模糊PID控制器的设计
模糊PID控制器的系统结构如图5所示[5]。模糊控制器把误差e与将其求导后得到的误差变化ec作为双输入端,把比例系数KP、积分系数Ki、微分系数Kd作为三输出端;其工作原理为将e与ec输入进模糊控制器进行模糊推理运算,在得出KP、Ki、Kd后,将结果传到PID控制器中运算。误差e也作为输入端进入PID控制器运算,最终通过综合运算得出输出量C[6]。
4 模糊PID下的仿真实验与数据
在MATLAB的命令行窗口中输入“fuzzy”一词,即可打开MATLAB中的模糊逻辑工具箱。根据实际要求更改输入和输出的个数,由于模糊控制器由误差e与误差变化量ec作为模糊控制器的输入变量,而KP、Ki、Kd作为模糊控制器的输出变量,故选用双输入三输出的结构,如图6所示。
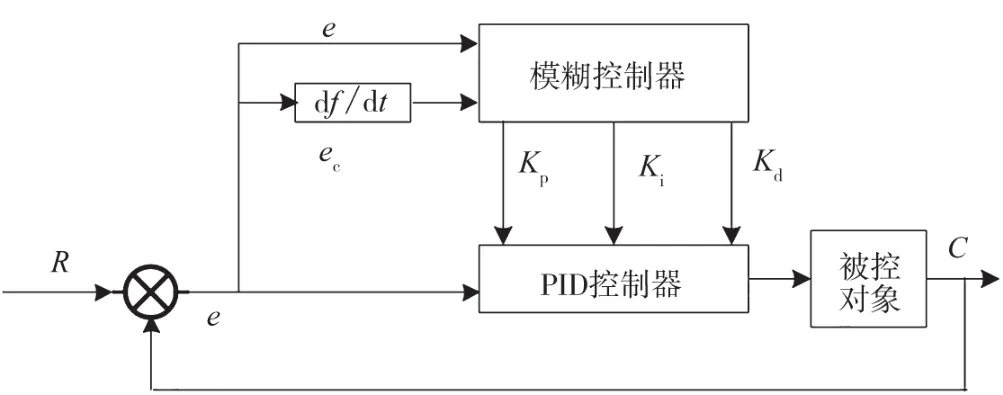
图5 模糊PID控制器的结构图

图6 模糊逻辑工具箱界面
将设置好的模糊控制器应用在Simulink中,选择好模块后即可以获得模糊PID的仿真模型结构[7],如图7所示。

图7 模糊PID系统Simulink仿真结构图
PID控制器选用的参数整定方法是Chien-Hrones-Reswick整定法。给予该系统一个阶跃函数[8],得到的仿真结果如图8所示。
由图8可知,模糊PID控制系统与系统自身的传递函数、普通的PID控制器控制结果相比,其超调量明显更小、调节时间更短,从而更快进入稳态,且得到的仿真波形在调节时间内的波动更少等[9]。
5 结 论
本文设计复合型的模糊PID控制器,多端变量输入,经实验仿真论证了本设计拥有实际使用的可行性、调节时间更短及波形波动更少等特点。

图8 模糊PID控制器的仿真结果
猜你喜欢
浙江共产党员(2022年10期)2022-11-23
成都信息工程大学学报(2021年6期)2021-02-12
环球时报(2020-08-11)2020-08-11
电子制作(2019年16期)2019-09-27
中学生数理化·高一版(2019年3期)2019-04-15
电子制作(2016年21期)2016-05-17
汽车零部件(2015年5期)2015-01-03
航空知识(2001年5期)2001-06-12
航空知识(2000年1期)2000-06-07