
基于TECS的舰载机轨迹角控制研究
2019-11-28 15:47刘涛蒙泽海白荣强
科技创新与应用 2019年31期
刘涛 蒙泽海 白荣强

摘 要:舰载机进近着舰时多面临轨迹稳定性的问题。轨迹稳定性的下降和飞机进入第二平飞状态时阻力急剧增大有关,此时飞机的轨迹变化和操纵期望不匹配,突出表现为飞机总能量的急剧发散。对此基于总能量控制(TECS)的思路,设计了舰载机在轨迹不稳定性情况下的轨迹角控制器,经同常规动力补偿系统(APCS)的对比和蒙特卡洛拉偏仿真,表明基于TECS设计的轨迹角控制器,对于解决轨迹不稳定问题,有重要的工程意义。
关键词:轨迹稳定性;平飞范围;总能量控制;动力补偿系统
中图分类号:V212.1 文献标志码:A 文章编号:2095-2945(2019)31-0015-03
Abstract: Carrier-based aircraft's approach landing state often faces flight path stability problems. The decline of flight path stability is related to the dramatic increase of drag force when the aircraft enters the second level flight area, where mismatch between aircraft longitudinal control and actual trajectory changes appear, and mainly manifested by the sharp divergence of the total energy of the aircraft. Based on the idea of Total Energy Control System (TECS), a path angle controller for carrier-based aircraft under flight path instability is designed. Compared with conventional Automatic Power Compensation System (APCS) and Monte Carlo simulation, it shows that the path angle controller designed by TECS has good application value and has important engineering significance for solving the problem of flight path instability.
Keywords: flight path stability; second level flight area; TECS; APCS
引言
同陸基飞机相比,舰载机由于常常存在轨迹稳定性差的情况,导致其进场着舰困难。轨迹稳定性指驾驶员仅通过俯仰操纵来控制飞机飞行轨迹(高度)时的闭环稳定性情况[1-2]。轨迹稳定性下降甚至失稳常常发生在低速飞行状态,进入违反常规驾驶习惯的“反操纵区”,也就是飞机阻力曲线的“背区”[3-4],此时驾驶员难以实现轨迹的精确跟踪,甚至会为进场着陆飞行带来风险。因此,采取控制措施,解决轨迹不稳定带来的进场着舰难题,提高着舰安全性,是十分必要的。
为解决舰载机进场着陆时的轨迹稳定性问题,早在1948年,美国海军就提出了建立动力补偿系统(Approach Power Compensation System, APCS),实现全自动着舰(Automatic Carrier Landing System, ACLS)的构想,经过多年发展已经形成了成熟的舰载机自动着舰技术,并在F/A-18上得到成功应用[5-8]。在我国国内,对动力补偿技术的研究也已非常广泛,常规的APCS技术也已成熟。但对于航母发展仍处于起步阶段的我国,舰载机进近着舰时的轨迹稳定性和轨迹控制,仍需进一步探索研究。
本文立足前人研究基础,首先简要介绍轨迹稳定性的原理和判据,其次采用总能量控制TECS方法,建立舰载机着舰时的轨迹角控制方案,最后对比在舰载机上常规使用的基于迎角恒定的APCS方法和TECS方法的控制效果,并进行蒙特卡洛拉偏仿真。结果表明,采用TECS控制方法,可以使飞机的姿态和轨迹解耦,规避轨迹不稳定问题,并相比APCS方法获得更好的轨迹角控制收益。
1 轨迹稳定性概述
飞机的平飞需用推力曲线可以反映轨迹稳定性。在第二平飞范围,也就是阻力曲线的“背区”,飞机的阻力随速度减小而增大。当飞机的飞行速度处于这一区域时,如果驾驶员意图拉杆使飞机爬升,同时保持油门杆不动,虽然在短时间内飞机会抬头并减速,轨迹向上,但同时阻力随速度减小而迅速增大,飞机最终将因为剩余功率不足而转为下滑。这种拉杆-减速-轨迹向下的运动,就是由轨迹不稳定导致的非预期现象。
轨迹角对空速的变化率d?酌/dV常作为轨迹稳定性的判据[9]。该参数可由轨迹角和速度对升降舵的传递函数推导得到,经简化也可表达为式(1)。
即
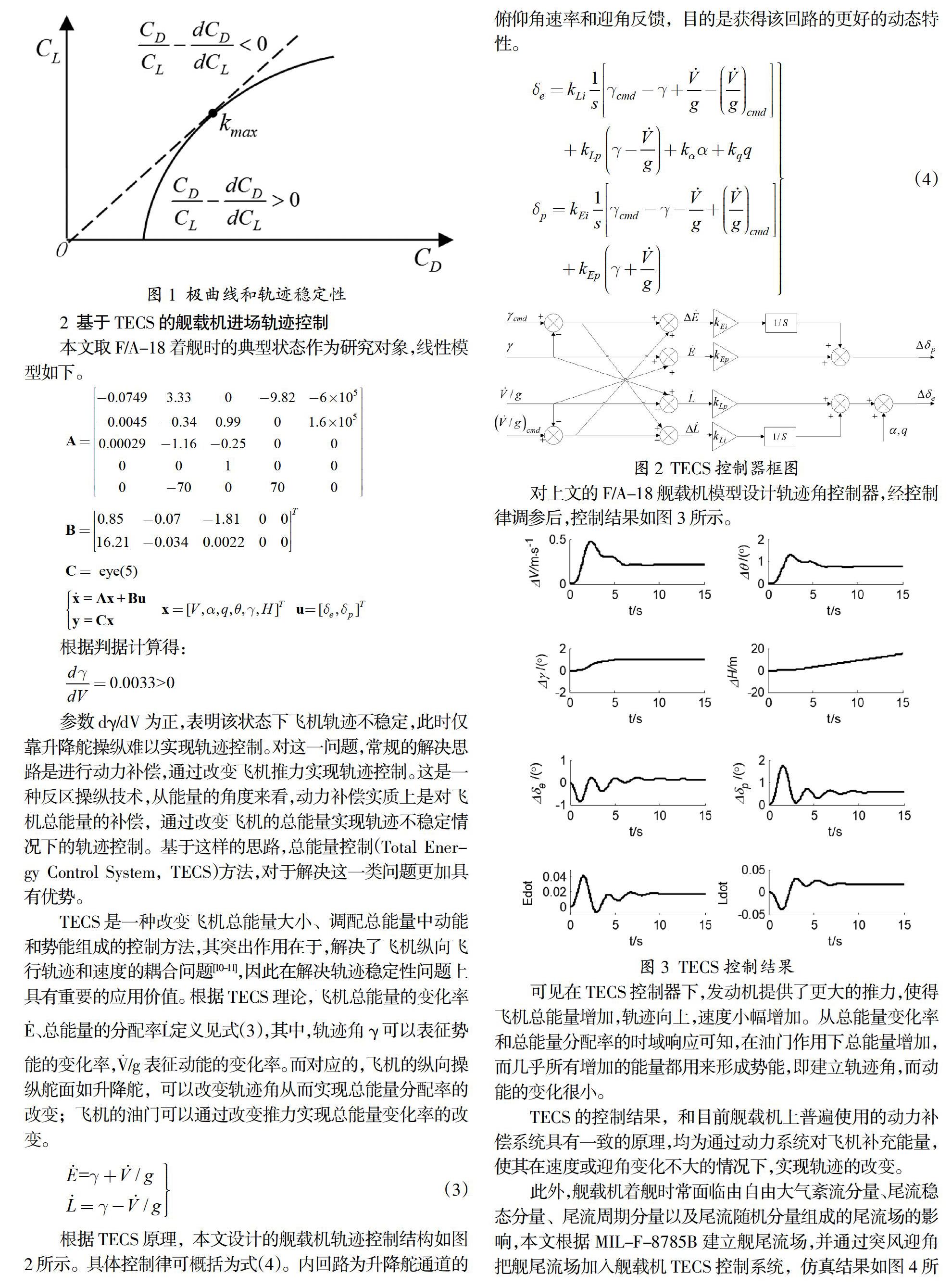
式(2)指出了轨迹稳定性和极曲线的关系,如图1所示。以最大升阻比为界,分为轨迹稳定和不稳定两个区域。
轨迹稳定性属于飞行品质要求的一部分,对此军民用飞机有着不同的规定。对比MIL-F-8785C和CCAR-25的相关条款,简要而言,军机允许轨迹不稳定现象的存在,但不得“过于不稳”,也不得下降过快;而民机则不允许存在轨迹不稳定的情况,且必须表明具有足够的轨迹稳定性裕度。
飞机的轨迹稳定性常通过飞行试验表明。飞机以进场着陆构型,在最小使用速度左右取不同速度进行直线下滑,记录数据并绘制V-?酌曲线,从而得到d?酌/dV信息, 最终对轨迹稳定性作出定量判断。
2 基于TECS的舰载机进场轨迹控制
本文取F/A-18着舰时的典型状态作为研究对象,线性模型如下。
根据判据计算得:
参数d?酌/dV为正,表明该状态下飞机轨迹不稳定,此时仅靠升降舵操纵难以实现轨迹控制。对这一问题,常规的解决思路是进行动力补偿,通过改变飞机推力实现轨迹控制。这是一种反区操纵技术,从能量的角度来看,动力补偿实质上是对飞机总能量的补偿,通过改变飞机的总能量实现轨迹不稳定情况下的轨迹控制。基于这样的思路,总能量控制(Total Energy Control System, TECS)方法,对于解决这一类问题更加具有优势。
TECS是一种改变飞机总能量大小、调配总能量中动能和势能组成的控制方法,其突出作用在于,解决了飞机纵向飞行轨迹和速度的耦合问题[10-11],因此在解决轨迹稳定性问题上具有重要的应用价值。根据TECS理论,飞机总能量的变化率■、总能量的分配率■定义见式(3),其中,轨迹角γ可以表征势能的变化率,■/g表征动能的变化率。而对应的,飞机的纵向操纵舵面如升降舵,可以改变轨迹角从而实现总能量分配率的改变;飞机的油门可以通过改变推力实现总能量变化率的改变。
根据TECS原理,本文设计的舰载机轨迹控制结构如图2所示。具体控制律可概括为式(4)。内回路为升降舵通道的俯仰角速率和迎角反馈,目的是获得该回路的更好的动态特性。
对上文的F/A-18舰载机模型设计轨迹角控制器,经控制律调参后,控制结果如图3所示。
可见在TECS控制器下,发动机提供了更大的推力,使得飞机总能量增加,轨迹向上,速度小幅增加。从总能量变化率和总能量分配率的时域响应可知,在油门作用下总能量增加,而几乎所有增加的能量都用来形成势能,即建立轨迹角,而动能的变化很小。
TECS的控制结果,和目前舰载机上普遍使用的动力补偿系统具有一致的原理,均为通过动力系统对飞机补充能量,使其在速度或迎角变化不大的情况下,实现轨迹的改变。
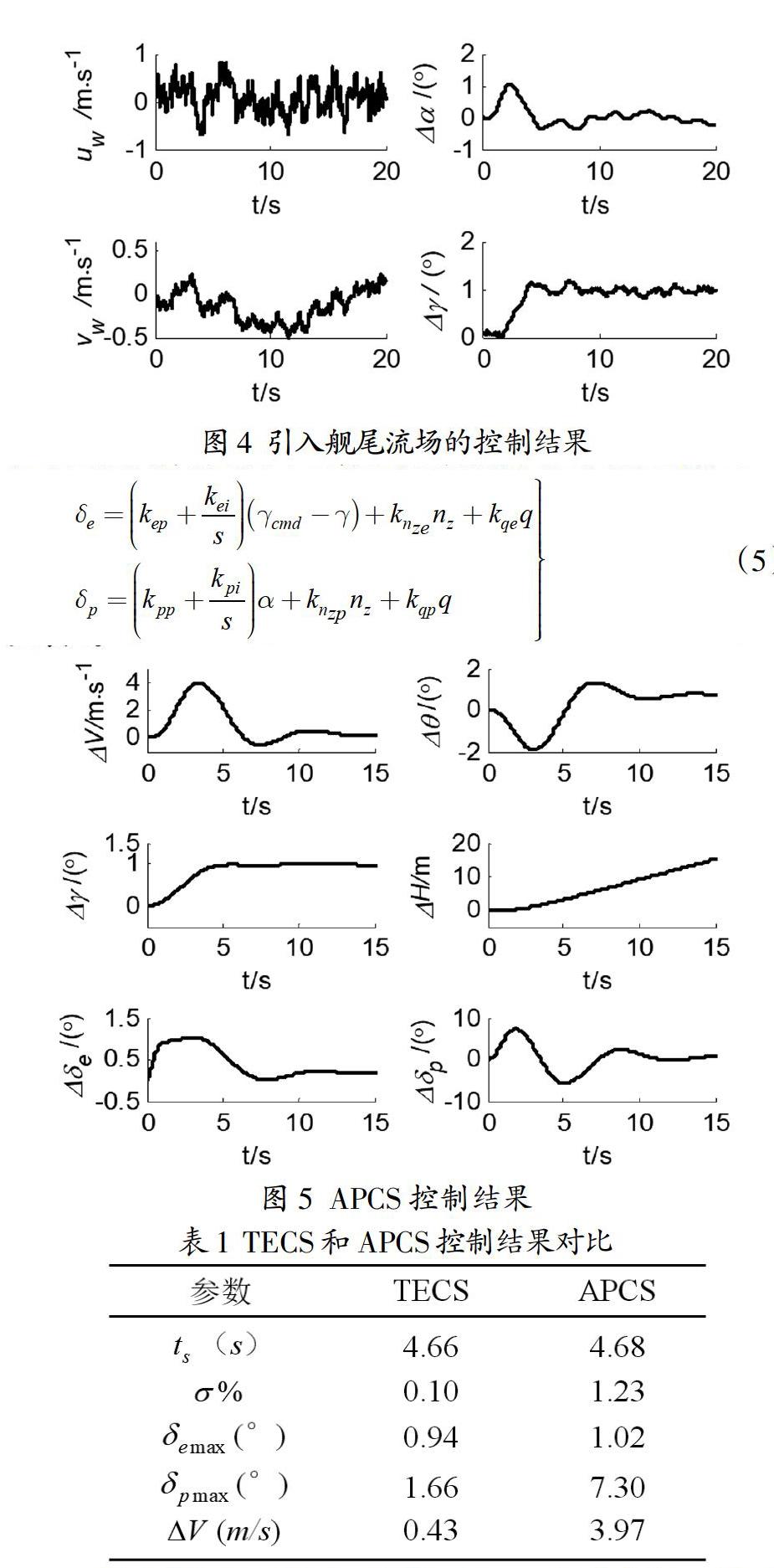
此外,舰载机着舰时常面临由自由大气紊流分量、尾流稳态分量、尾流周期分量以及尾流随机分量组成的尾流场的影响,本文根据MIL-F-8785B建立舰尾流场,并通过突风迎角把舰尾流场加入舰载机TECS控制系统,仿真结果如图4所示。
结果表明,TECS控制系统在舰尾流场下,轨迹角响应的超调量不超过20%,调节时间基本不变,存在小幅振荡,依然可以实现控制目标。
3 TECS和APCS的控制性能比较
为进一步确定TECS控制器对舰载机进场着舰时轨迹控制的优势,本文对比了其与保持迎角恒定的APCS系统的控制结果。保持迎角恒定的APCS控制律如式(5)所示。该控制系统在油门通道加入迎角、法向过载和俯仰角速度的反馈,意在通过油门保持迎角不变,同时改善油门通道的动态特性。
对同样的飞机状态点设计迎角恒定的APCS,各状态量的时域响应曲线如图5所示,APCS同TECS的控制性能对比见表1。
可见在调节时间相当的情况下,TECS的超调量、用舵量以及速度变化量均明显降低,尤其是大幅减少了油门杆偏角,保证了舰载机能有足够的动力裕度应对其他突发事件。
进一步,本文通过基于拉丁超立方抽样的蒙特卡洛拉偏,检验了TECS和APCS的鲁棒性。设置模型内各参数的不确定度均为20%,拉偏次数为30,轨迹角的拉偏结果如图6所示。可见TECS经拉偏后,虽然存在小幅度振荡情况,但调节时间、超调量等無显著增大,轨迹角的响应没有出现明显恶化;而APCS拉偏结果存在超调增大、调节时间增长的现象,控制性能明显下降。因此在本文条件下,APCS的鲁棒性不及TECS。
4 结束语
本文介绍了轨迹稳定性的概念和判据,并就舰载机轨迹稳定性差的问题,分别利用TECS和APCS设计了解决轨迹不稳定问题的控制方案。所得结论如下:
(1)轨迹稳定性主要和飞机的升阻特性有关,并主要受阻力特性主导,当飞机处于第二平飞范围时,轨迹稳定性下降并失稳。(2)轨迹不稳定体现为飞机总能量的发散,这为采用TECS控制飞机轨迹提供了思路,这也与常规解决轨迹不稳定的动力补偿系统控制思路一致;(3)TECS控制可以实现飞机在轨迹不稳定情况下的轨迹角控制,且相比于APCS,具有更好的控制收益和鲁棒性。
参考文献:
[1]桑雨生.飞行轨迹稳定性应用的分析[J].飞行力学,1999(2):72-77.
[2]范立钦.飞行轨迹稳定性[J].飞行力学,1983(1):235-244.
[3]方振平,陈万春,张曙光.航空飞行器飞行动力学[M].北京:北京航空航天大学出版社,2012:51-52.
[4]王新华,杨一栋,朱华.低动压着舰状态下飞机的操纵特性研究[J].飞行力学,2007(4):29-32.
[5]崔玫. 舰载机全自动着舰引导飞控系统设计[D].哈尔滨工程大学,2014.
[6]T S Durand, G L Teper. An Analysis of Terminal Flight Path Control in Carrier Landing[R]. AD-606040, 1964.
[7]S J Craig, R F Ringland, I H Ashkenas. An Analysis of Navy Approach Power Compensator Problem and Requirements[R]. AD-722025, 1969.
[8]唐大全,毕波,王旭尚,等.自主着陆/着舰技术综述[J].中国惯性技术学报,2010(5):550-555.
[9]Background information and user guide for MIL-F-8785B(ASG), Military Specification Flying Qualities of Piloted Airplanes.[M] AFFDL-TR-69-72. 1969.
[10]吴树范,蔡维黎,沈勇璋,等.飞机总能量控制系统的研究Ⅰ——原理分析与系统设计[J].航空学报,1993(7):355-361.
[11]Lambregts A A. Vertical Flight Path and Speed Control Autopilot Design Using Total Energy Principles. AIAA 83-2236CP.
