基于SVDD和D-S理论的曲轴轴承故障诊断
2019-12-17 09:22张懿,崔佳
重庆理工大学学报(自然科学) 2019年11期
张 懿,崔 佳
(1.江苏科技大学 电子信息学院, 江苏 镇江 212003; 2.常熟瑞特电气股份有限公司, 江苏 常熟 215500)
柴油机是机械动力装置的心脏,其健康状态至关重要。对于柴油机故障来说,特征提取[1-2]非常困难也非常关键,采用适用于柴油机信号特点理论和方法是确保提取柴油机故障信号特征的首要条件。岳应娟等[3]将故障信号映射为其时频图像的识别问题,有效进行故障信号的分类。沈虹等[4]针对柴油机故障位置存在不确定性、时间不确定等问题,提出了一种基于时频图像极坐标增强的柴油机故障诊断方法。刘中磊等[5]利用阶比双谱方法有效提取滚动轴承故障振动信号的特征,对滚动轴承故障进行正确的判断。
柴油机故障诊断技术是根据已收集的各种参数信息及状态量,并在对信息进行优化、处理、分析后,给出最终的诊断结论。在这一过程中,信息的来源以及数据量的大小决定了诊断结果的好坏,由此看来,柴油机的故障诊断技术与信息融合技术有着相同的原理和结果,所以信息融合技术也可应用于柴油机故障诊断论域。
本文将SVDD与D-S理论相结合,应用于柴油机故障诊断,针对柴油机故障部位与故障特征之间没有明确对应关系的问题,采用多传感器采集信号、多故障特征提取方法、不同分类器处理结果获得的各种冗余互补信息。使用SVDD方法改进D-S证据理论,并建立两级融合模型进行验证,实现多等级、多层次的诊断,且与图像处理、阶比双谱等方法进行实验对比。结果表明,此方法的诊断精度和稳定性优势明显提高。
1 信息融合理论
1.1 信息融合的依据
多源信息融合[6-7]技术研究对象为一个多传感器的信息处理系统,其本质是:通过先进的数据处理技术依次获取每一传感器的观测信息,再按照规定的算法对数据进行自动筛选、综合,从而得到决策所需信息。
在柴油机故障诊断过程中,样本参数非常多,如振动参数、热力参数、燃油压力参数、油液和其他参数等。这些参数从各个方面及不同程度折射出柴油机的运行状况,因此可通过充分利用这些参数,从而有效地提高柴油机故障诊断的准确性。然而,仅单一的特征信息并不能充分反映其运行状态,在实际诊断过程中,尽可能多地获得柴油机的特征信息,能对其进行更可靠、更准确的状态识别。另外,随着获取信息的增多,能对多特征信息进行更有效的综合利用,提高柴油机故障诊断的准确性、可靠性和有效性。
1.2 信息融合的级别
多源信息融合技术可分为3种:① 数据级融合,其优点为数据量利用率较高,能够提供数据层中细微的信息,精度最高,但由于数据量过大导致局限性也很明显,效率低下。② 特征级融合,融合阶段在特征向量提取完成之后,其优点在于简化数据量,方便数据的实时处理,但因存在数据压缩过程,性能依旧较低。③ 决策级融合,各传感器收集到数据后先进行初步决策,随后汇总于融合中心进行融合处理得到局部决策。此融合方式是三级融合的最终结果,即使部分采集点故障,系统仍可通过融合处理获得理想结果,不过由于数据损失最多,融合精度较其他两级融合要低。
3个融合层次各有优缺点和适用范围,由于数据级融合运算复杂,本文将特征级融合和决策级融合相结合,在特征级通过支持向量数据描述得出局部决策,进一步采用D-S证据理论对特征级下的局部决策进行决策级融合,以获得最终诊断结果。
2 D-S证据理论
2.1 基本概念
定义1:设θ为识别框架,若函数m:2θ→[0,1]符合下列条件:
1) 不存在概率为0事件,即:
m(φ)=0
2) 框架Θ的所有元素概率相加结果为1,即:
则称m为框架Θ上基本概率分配函数,m(A)称为A的基本可信数,表示对A的信任度。
定义2:设Θ为识别框架,若函数Bel:2θ→[0,1]符合:
(1)
则称Bel为信任函数,也称作下界函数,反映对A的完全信任。
定义3:设θ为识别框架,若函数Pls:2θ→[0,1]符合:

(2)
则称Pls为似然函数,也称为上界函数,A的随机性由式(3)表示。
u(Θ)=Pls(A)-Bel(A)
(3)
[Bel(A), Pls(A)]称为置信区间,表示对A的随机性区间。
D-S证据理论[8]可以将模糊信息的状况表示出来,如图1所示。
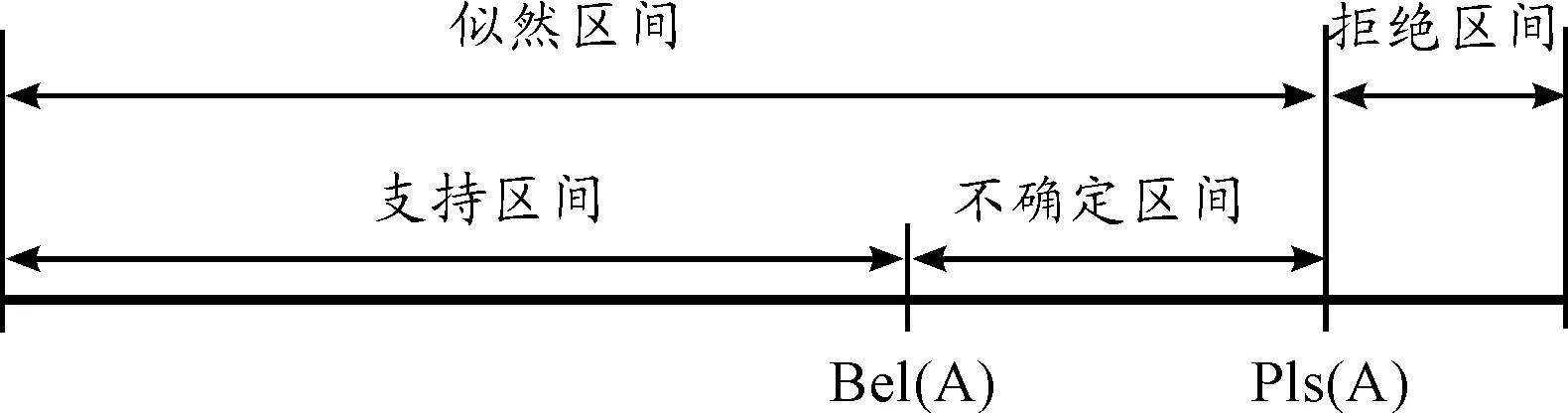
图1 证据理论的信任区间示意图
2.2 合成和决策规则
设Bel1和Bel2是在相同区分框架θ的2个置信函数,m1和m2是相应的可信系数,焦元分别为A1,A2,…,Ak和B1,B2,…,BL,并假设
(4)
合成后的基本概率分配函数M:2θ→[0,1]则为:
(5)
由式(5)可知,合成顺序并不影响合成计算的结果,因此可采用2个基本证据合成递推到多个。
在得到证据对识别框架中所有命题的置信区间[Bel(A),Pls(A)]和证据的随机性u(Θ)之后,可以由以下2条规则确定最终结论F:
规则1:Bel(F)>ε;
规则2:u(θ)<γ。
式中:ε和γ均取大于零的常数,它们的值根据实际情况而定,如果上面2条规则同时满足,则可判定该事件发生。
2.3 SVDD与证据理论的结合
支持向量机[9-10]描述在解决模式识别相关问题上具有明显优势,适用于高阶、非线性、多维数的复杂问题。单一的决策理论可能会具备或多或少的缺陷,例如诊断决策精度不够高。为此,可以任意选取部分决策,并将其与D-S理论进行深度融合。SVDD的概率输出还不能直接用来进行融合,需要将其转化为基本概率分配函数。
2.3.1SVDD的识别误差的上界
定理:假设某个最优分类面或广义最优分类面区分随机测试样本,那么训练样本分类错误概率期望的上界可用训练样本中支持向量平均值E(nsv)与总训练样本N的比值表示:
(6)
2.3.2模糊隶属度的BPA输出
如式(6)所示,不等式右侧取等号时,可用于描述分类器SVDD对样本x的随机性。
所以,采用下述方法得到的分类SVDD的BPA输出:首先求出各类支持向量个数的期望值,再由式(7)得出识别误差最大值,最后用SVDD的精度最小值即SVDD隶属度输出进行加权处理,即可得到多分类SVDD证据理论识别框架下的BPA输出。
(7)
mi(x)=fi(x)·(1-E(Perror))。其中,i=1,2,…,M。
3 基于SVDD和D-S理论的柴油机故障诊断实例
3.1 两级信息融合的柴油机故障诊断模型
传感器所采集信号越多,多信号处理方式的融入势必会造成故障诊断特征参数的复杂化,训练时间激增、学习样本产生不可避免的矛盾,同时也提高了整个诊断计算过程的维度和阶数。最终造成了SVDD模型泛化能力减弱、分类精度降低的现象。
为克服这些不足,提高故障诊断精度,本文提出基于特征级和决策级两级融合的诊断模型进行故障诊断,其结构逻辑图如图2所示。首先,将各个传感器的原始信号按照EEMD-SVD方法、阶比双谱方法、图像处理方法等进行特征参数提取,然后对不同信号处理方法得到的特征参数进行SVDD模式识别,得到该组特征数据相对于不同SVDD分类器的模糊隶属度输出,再将其转化为BPA输出作为证据体进行决策级融合,即利用D-S证据理论,通过融合各种方法的决策信息,获得更准确的诊断结果。
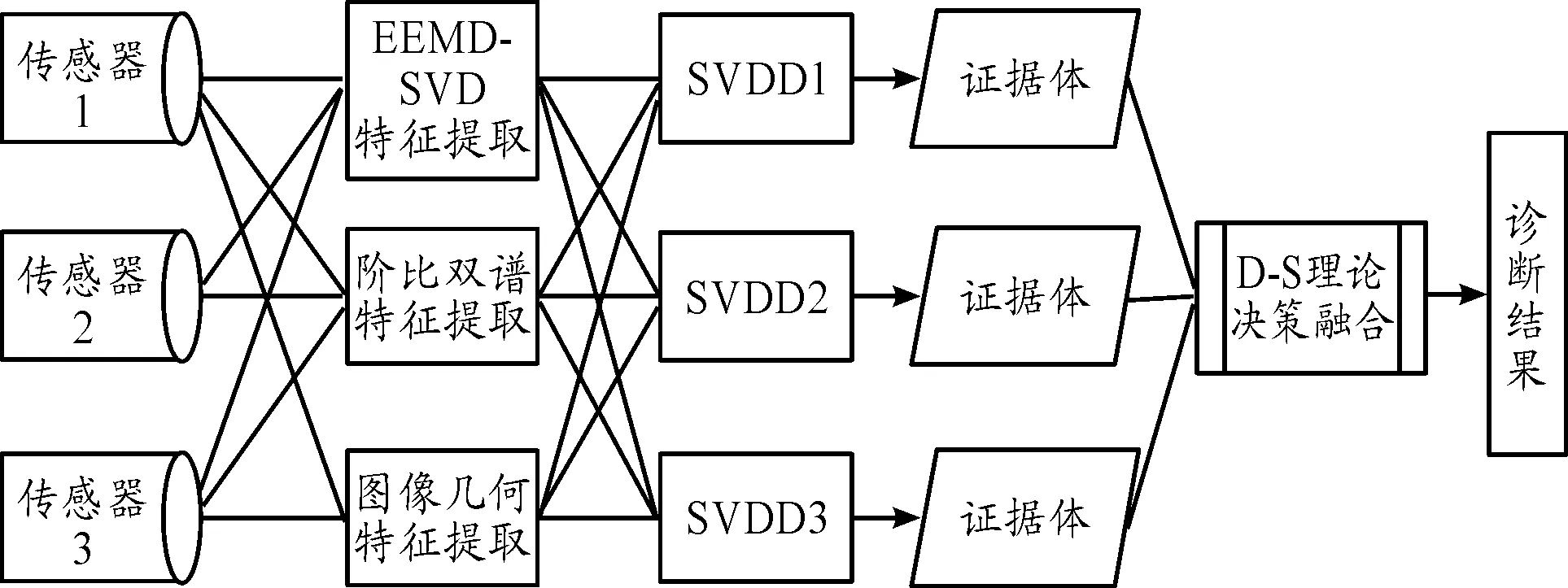
图2 两级信息融合诊断模型
信息融合的原理可以很好地解释这一结论:各个传感器将原始的裸数据不做任何处理直接进行特征提取,提取完成后输出的特征参数传送给相应的子模块中,在其内部作出局部决策。子模块的输出则为相应的证据体子空间可作为故障样本子空间,将这些故障样本子空间进一步使用D-S证据理论进行决策融合,得到最终的诊断结果。在此过程中融合进行了2次,既可以高效利用大部分数据,又能解决通讯带宽的问题,使得诊断系统的精确性和稳定性得到改善。
3.2 基于两级信息融合技术的曲轴轴承故障诊断
采用上述方法对曲轴轴承故障进行诊断,传感器选取601 A01型ICP工业加速度传感器,采集相应的振动信号,安装位置如图3所示。
曲轴轴承配合间隙分别设置为0.08、0.1、0.2、0.4 mm(分别对应正常、轻微、中度、严重等不同级别的磨损),发动机转速设为1 800 r/min,采样频率设为12 800 Hz,采集柴油机缸体与油底结合处左右两侧位置处(位置D、E)发动机振动信号与正常工况的振动信号进行比较分析。
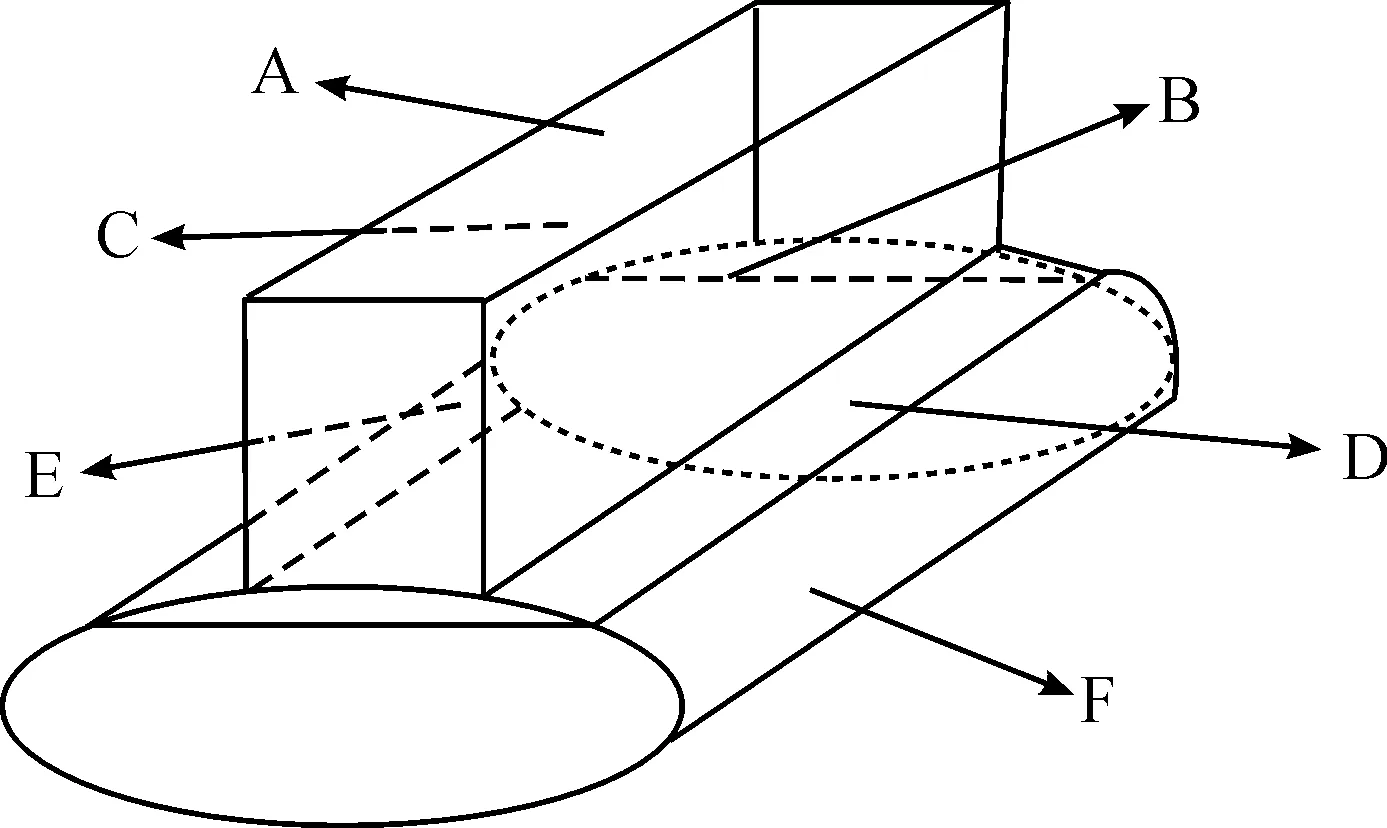
A-第三缸顶;B-缸体上部第三缸右侧;C-缸体上部第三缸左侧;D-油底与缸体结合处第三缸右侧;E-油底与缸体结合处第三缸左侧;F-第三缸油底下部
图3 加速度振动传感器放置位置
采用不同的特征提取方法提取出特征参数集,经过粗糙集理论优化后,与SVDD算法结合,构成一种分类器。多少组诊断数据输入,就会得到不同分类器下的多少组证据体输出。表1、表2和表3列出了5组样本所构成的证据体,表中F1、F2、F3、F4分别表示相应的轴承分析对象的磨损状态。以5组样本说明信息融合过程及融合效果,集体步骤如下:
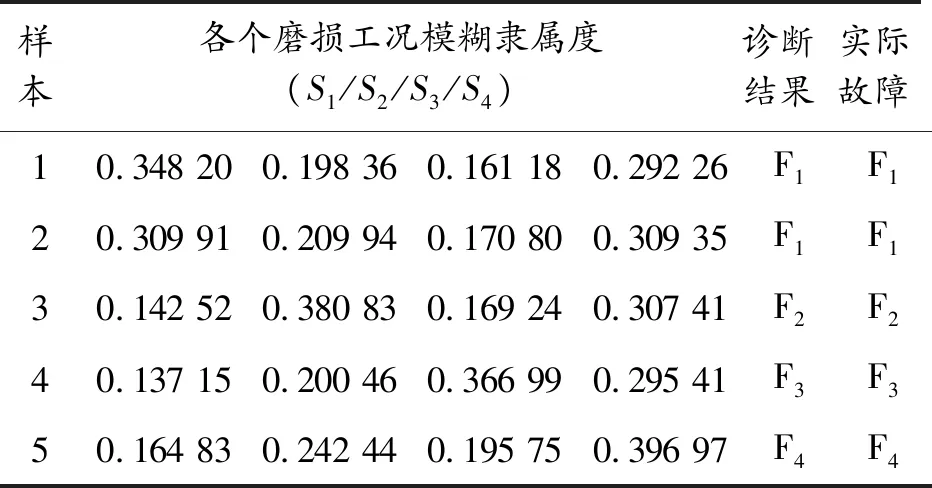
表1 EEMD-SVD方法SVDD模型的曲轴磨损诊断结果
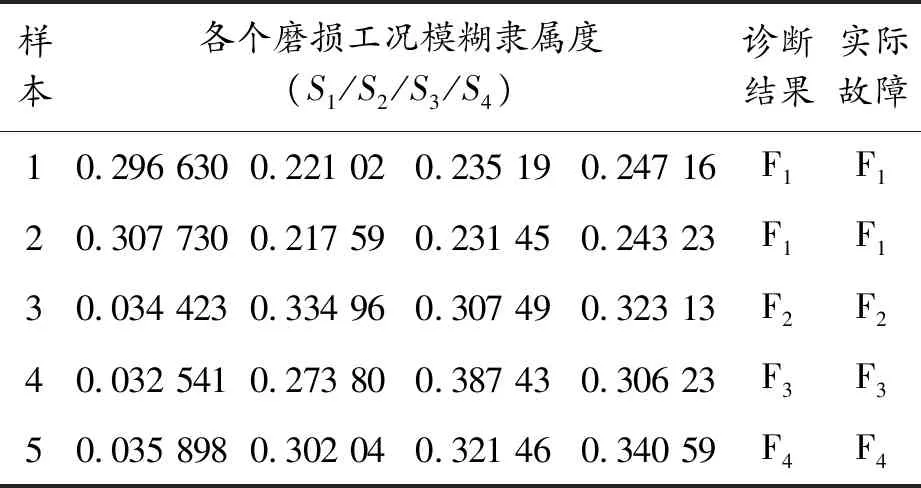
表2 阶比双谱方法SVDD模型的曲轴磨损诊断结果
1) 将3个SVDD分类器的隶属度输出分别转化为不同证据体下的BPA值。首先,根据式(7)计算得到不同分类器的随机性。例如,采用EEMD-SVD方法提起信号特征的SVDD多分类器,训练样本数为40组,训练SVDD多分类器得到支持向量的个数为33个,可以计算支持向量个数均值为8.25,代入式(7),计算得到分类器SVDD1的随机性为0.211 6;然后根据式(8)计算证据体的BPA 值,例如样本数据1在多分类器SVDD1的隶属度概率输出分别为0.348 2、0.198 36、0.161 19、0.292 26,即取值为0.348 2、0.198 36、0.161 19、0.292 26,对隶属度输出进行加权处理后,即可得到数据1在证据体BPA值分别对0.274 5、0.156 4、0.127 1、0.230 4按照同样的处理方法得到样本数据1~5在3个分类器对应证据体的BPA值,如表4~6所示。
2) 得到样本数据1~5在3个分类器对应证据体的BPA之后,按照D-S理论中合成规则公式(5)得到分类器1、分类器2对应的证据体融合后的BPA,然后再将2个证据体融合后的BPA与分类器3对应的BPA进行融合,即可得到3个分类器相应证据体合成后的BPA合成后的结果,如表7所示。

表3 图像处理方法SVDD模型的曲轴磨损诊断结果

表4 SVDD1基本概率分配函数值

表5 SVDD2基本概率分配函数值

表6 SVDD3基本概率分配函数值

表7 决策层融合诊断结果
按照上述步骤,对其余195组测试样本中的3个分类器隶属度输出分别转化为不同证据体下的BPA值,然后按照D-S理论中的合成规则公式进行融合,可以得到全部测试样本的诊断结果。经统计,在全部的200组测试样本中,有186组样本得到正确的分区,14组误判,判断正确率为93%。
4 结论
柴油机系统复杂且不稳定,导致了故障部位与故障特征的多样性,对其进行精确故障诊断存在的技术难点在于:故障部位与故障特征之间没有明确的对应关系,即一个故障部位可能产生多个故障特征,一个故障特征可能与多个故障部位相关联。这样采用单一传感器获取信息,或采用单一信号处理方法进行故障诊断的精确度将十分有限。本文充分利用多传感器采集信号、多故障特征提取方法、不同分类器处理结果获得各种冗余互补信息。使用SVDD方法改进D-S证据理论,并建立两级融合模型进行验证,实现多等级、多层次的诊断。且与图像处理、阶比双谱等方法进行实验对比。结果表明,此方法的诊断精度和稳定性优势明显提高。
猜你喜欢
一重技术(2021年5期)2022-01-18
汽车与新动力(2019年5期)2019-11-07
汽车观察(2019年2期)2019-03-15
电子制作(2018年10期)2018-08-04
电子技术与软件工程(2017年14期)2017-09-08
计算机应用(2017年4期)2017-06-27
汽车与新动力(2015年1期)2015-02-27
航天返回与遥感(2014年5期)2014-07-31
中原工学院学报(2014年4期)2014-04-01
振动、测试与诊断(2014年5期)2014-03-01