基于模糊逻辑控制的燃料电池汽车能量管理控制策略研究*
2020-01-04 02:58李顶根苗华春
汽车工程 2019年12期
王 骞,李顶根,苗华春
(1.广东电科院能源技术有限责任公司,广州 510030; 2.华中科技大学能源与动力工程学院,武汉 430074;3.深圳市晓龙新能源科技有限公司,深圳 518000)
前言
随着环境污染和化石燃料消耗的日益加剧,新能源汽车应运而生。作为传统车辆的一种替代方式,纯电动汽车和燃料电池汽车技术得到了广泛的关注[1]。由于目前动力电池技术尚未突破瓶颈,纯电动汽车的发展也因续驶里程不足等因素而受到诸多限制,而燃料电池 动力电池混合驱动作为新型车辆则兼备了传统汽车的续驶里程长和新能源汽车利用清洁高效的电能驱动、排放无污染等优点,被认为是理想车型[2]。
由于燃料电池电 电混动车型不同于传统燃油汽车和纯电动汽车,动力电池和燃料电池双动力源的存在使得能量管理控制策略显得尤为重要。所以,通过制定合理有效的控制策略将整车的需求功率在两个动力源之间进行最佳分配是提高整车动力性和燃料经济性的关键[3]。本文中以ADVISOR传统的功率跟随模式控制策略为基础[4],通过提出合理有效的能量管理策略控制车上搭载的双动力源,从而保证汽车正常行驶所需提供的能量,提高电 电混动汽车的性能。同时,又以汽车结束行驶时系统总的能量利用效率为优化目标对其进行了优化,通过对动力电池SOC和系统满足工况行驶所需功率Preq两个输入参数的基于微小变量的模糊逻辑控制对整车的模型进行优化,提高了燃料电池电 电混动汽车总的燃料利用效率和经济性[5]。
1 能量管理控制策略与设计要求
燃料电池 动力电池混合驱动汽车的微小变量模糊逻辑能量管理控制策略是指汽车根据不同的运行状态和工况,将整车的需求功率合理地分配给两个动力源,从而达到满足整车动力性能并提高整车经济性能的目的[6],其基本要求有:
(1)在动力电池SOC处于中高状态阶段时,尽可能依靠动力电池提供能量保证汽车正常行驶,当电机负荷功率较高时,由燃料电池和动力电池共同提供能量;
(2)在动力电池SOC处于低状态、电机需求功率较小的阶段时,为保证整车的经济性由动力电池提供小部分功率配合燃料电池提供的大部分功率满足整车行驶的动力性,当电机负荷功率较高且可以由燃料电池单独驱动时,由燃料电池提供全部能量,并由模糊逻辑控制提供合理的微小变量比例的整车需求功率为动力电池充电,使得动力电池SOC在整个行驶过程中缓慢提升并维持在期望值附近;
(3)通过能量管理控制策略控制燃料电池的功率工作点,保证其在高效率工作区;并维持动力电池SOC在合理的荷电状态区间内,避免动力电池过度放电和充电,保证低荷电状态区动力电池能够吸收燃料电池提供的充电能量。
本文中以ADVISOR中传统的控制策略为基础,从提高燃料利用效率来降低汽车使用成本的角度出发,制定了基于微小变量模糊逻辑控制的燃料电池动力电池混动能量控制策略。为避免过度放电,整车需求功率大于电池输出的部分由另一动力源输出功率进行补偿,从而保证汽车正常行驶的动力性和经济性需求。微小变量模糊逻辑控制燃料电池补偿动力电池放电的能量管理控制策略中各符号及意义如表1所示。
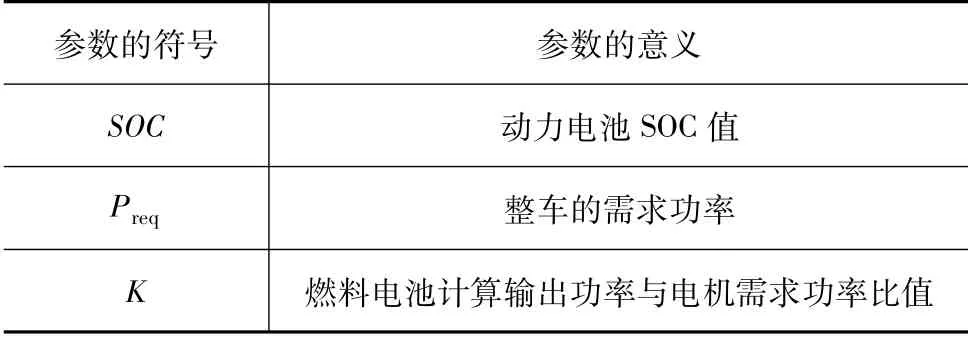
表1 控制策略参数表
此模糊逻辑控制策略中,若动力电池SOC处于中高状态,则整车以电 电混合模式运行,在此模式下由燃料电池和动力电池合理分配功率输出能量,保证汽车行驶的经济性;若动力电池SOC下降至低荷电状态区间,则根据整车需求能量的大小和工况确定模糊逻辑控制规则库,对燃料电池输出功率进行控制,以适当微小比例的整车需求功率对动力电池充电,控制策略流程图如图1所示。
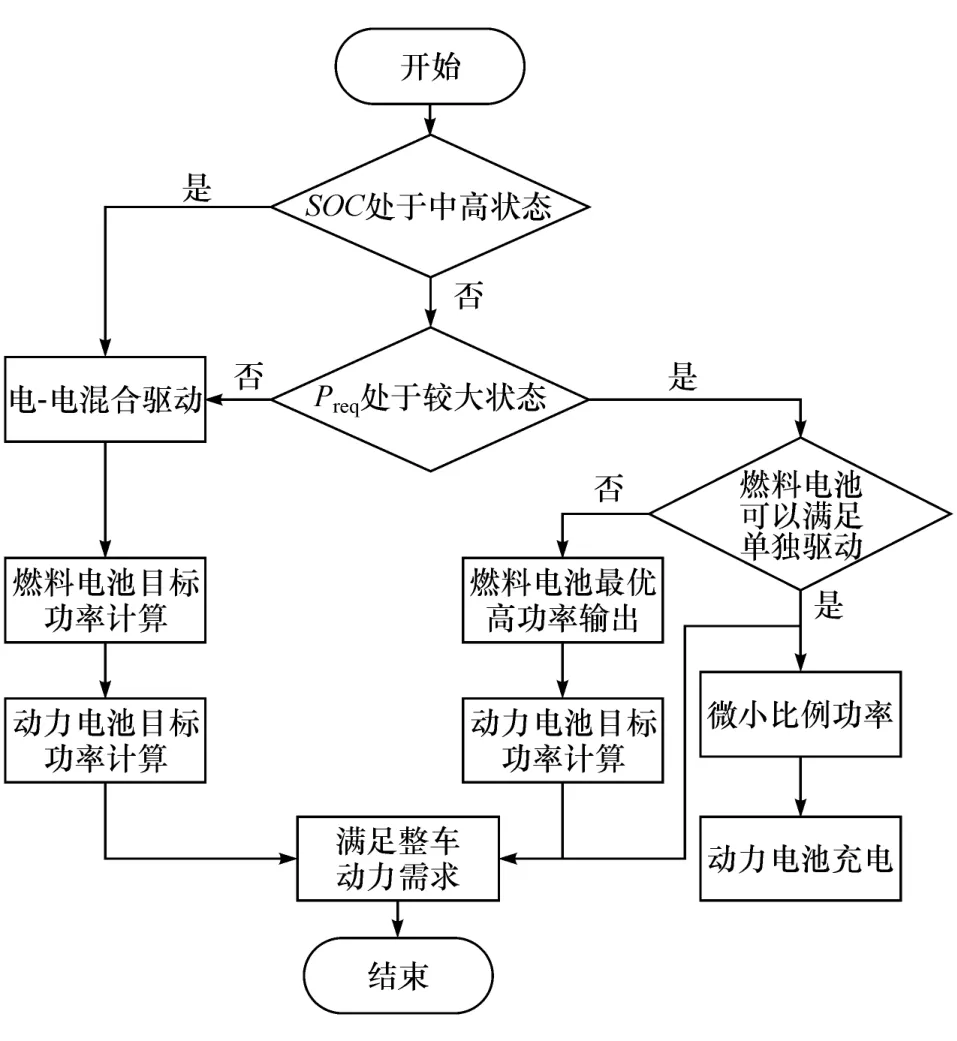
图1 模糊逻辑控制策略流程图
2 燃料电池系统建模
通过MATLAB建立的燃料电池堆模型的输出电流与电压的特性图可清晰地描述其性能特点,展示燃料电池输出电压与电流密度的函数关系,同时燃料电池所输出的电流与电压直接反映了其输出释放功率。
举办大型的文化事件营销活动,也是城市发展的途径之一。德国西部鲁尔区的波鸿,通过打造鲁尔艺术节、鲁尔钢琴节和波鸿综合音乐节等在欧洲拥有较高声誉和影响力的艺术节庆活动,实现了从工业基地到文化艺术中心城市的转型。法国名城戛纳,以每年5月举行电影节的方式,走上了城市发展的快车道。经过几十年的发展,戛纳国际电影节已跻身世界最大、最重要的四大电影节之一,每年吸引着30万人前来参加,给城市带来巨大的经济效益和良好口碑,戛纳也因此成为世界名城,吸引着众多游客。
2.1 燃料电池堆单体模型的建立
燃料电池电压-电流密度曲线为极化曲线,极化曲线可由下式表示[7-8]:
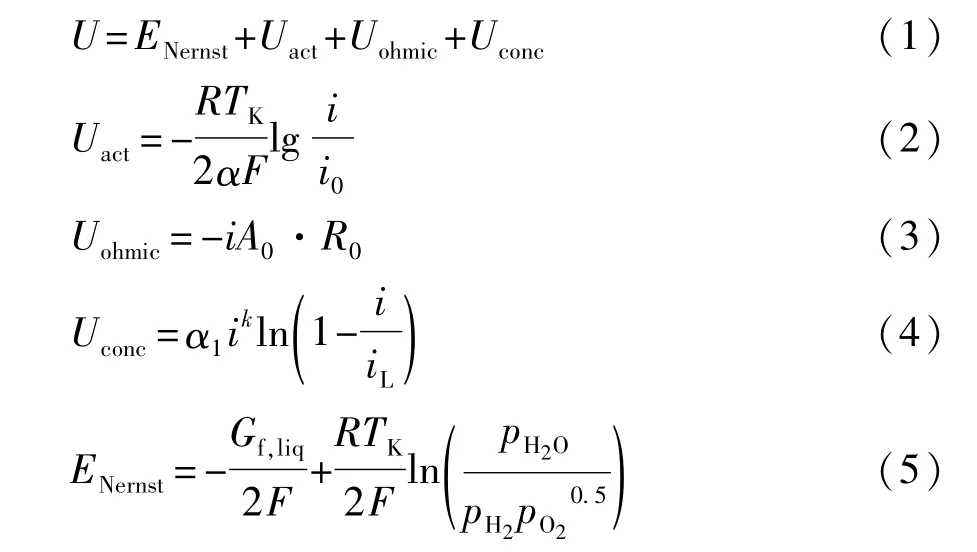
式中:U为实际输出电压值;ENernst为能斯特输出电压值;Uact为由塔菲公式推导的反应动力学引起的活化极化损失;Uohmic为由离子和电子传导引起的欧姆极化损失;i为当前仿真电流密度,文中为电流密度建立0-1.4 A/cm2步长为0.01的Loop循环仿真;Uconc为由质量传输引起的浓度极化损失。燃料电池电压功率模型中各参数符号及意义如表2所示。图2为使用MATLAB仿真的燃料电池单体电压极化特征曲线。
2.2 燃料电池堆实验模型的建立
本文中实验所用燃料电池反应堆为某进口30 kW质子交换膜燃料电池,由100个燃料电池单体堆栈叠加组成,如图3所示。图中,①为空气过滤系统,②为空气补偿系统,③为质子交换膜燃料电池反应堆,④为氢气供给管路,⑤为冷却系统管路。该电堆模组应用的质子交换膜活化面积为340 cm2,实验所用氢气的工作压力是6 atm。
针对实验数据建立符合实际情况的燃料电池反应堆模型,仿真结果如图4和图5所示。电流密度较低时由活化极化引起的快速电压损失和线性欧姆电压损失占主导作用,电压损失较小,随着电流密度的增大,高电流密度下的浓度变化引起的电压损失占主导作用且急剧增大,电压值在高电流密度下急剧减小。燃料电池反应堆的功率密度随电流密度的增加而增加,达到峰值30 kW,然后在较高电流密度区的浓度极化损失的影响下急剧下降。
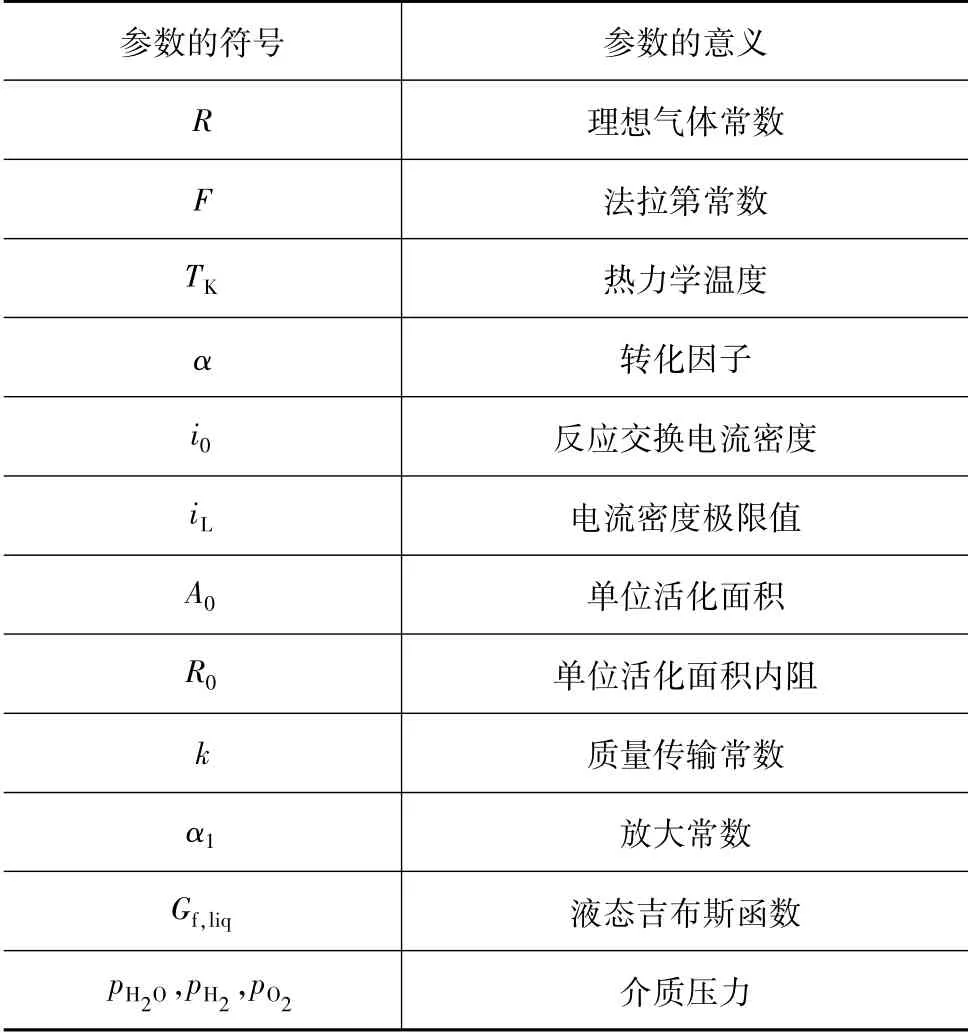
表2 燃料电池电压模型参数表

图2 燃料电池单体极化特征曲线
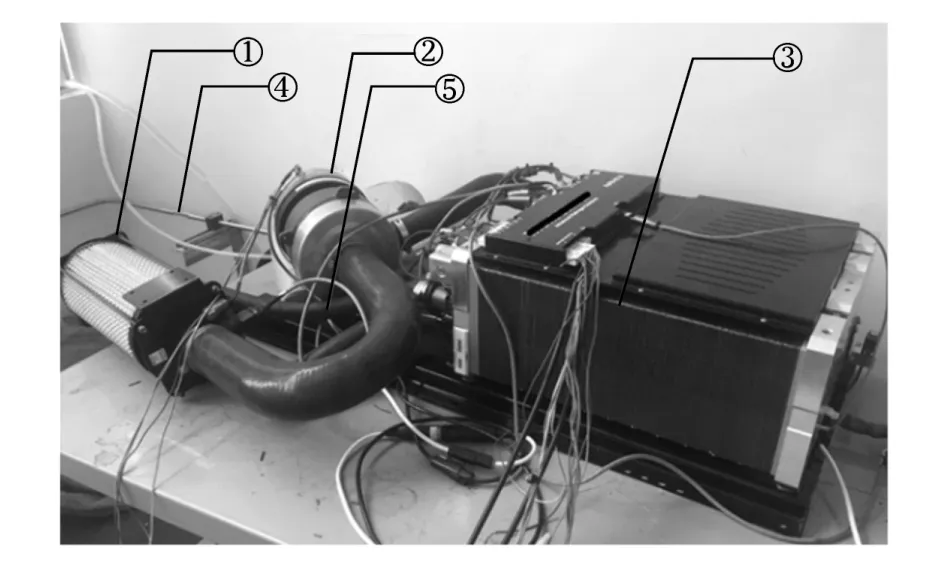
图3 实验所用燃料电池模块
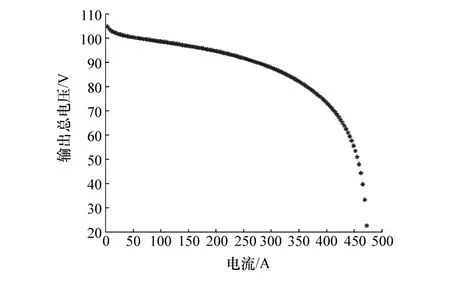
图4 燃料电池反应堆电压仿真曲线
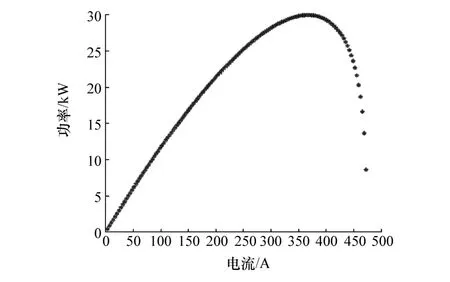
图5 燃料电池反应堆功率仿真曲线
电压和功率仿真特性曲线较好地反映了燃料电池反应堆的理论工作特性,基本符合如图6所示的实验测试数据曲线,电压随电流增大由105减小至75 V左右,功率随电流增大由0增加至30 kW左右。由图4~图6可以得出本文所建立模型误差与实际实验误差百分比不超过2.5%,说明仿真模型数据基本可靠。后续整车实验所用两个此类型反应堆结合较高效率的工作区间,使最优输出功率达到50 kW以上。
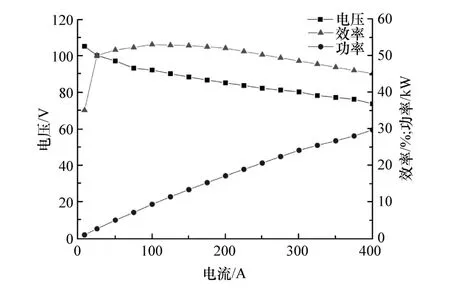
图6 燃料电池反应堆实验特性曲线
3 燃料电池汽车动力系统建模
为验证整车性能是否达到设计要求以及本文中所制定的能量管理策略的可行性,选择合适的仿真软件进行仿真。本章按照设计要求对ADVISOR中各部件模型参数进行修正,并在MATLAB/Simulink中搭建基于微小变量模糊逻辑的燃料电池混合动力汽车能量管理控制策略,进行了控制策略的二次开发优化。
3.1 整车动力学模型
汽车在行驶方向上受到的驱动力和行驶阻力决定了汽车沿行驶方向的运动特性,汽车在行驶方向上的受力如图7所示。汽车行驶的受力方程式[9]为

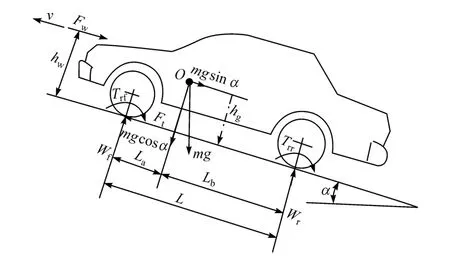
图7 整车行驶受力图
整车动力学模型主要根据轮胎接地点的受力平衡计算整车牵引力的大小,利用迭代的方法计算整车的加速度,进而逐步积分计算整车的速度。需求驱动力与平均速度的乘积就是驱动车轮行驶的需求功率。代入公式[9]:

最高车速对应功率为

最大爬坡度对应功率为

满足加速性能对应功率为

式中:ηT为传动系机械效率;ua为汽车行驶速度;G=mg,m为整车总质量;f为滚动阻力系数;α为道路坡度角;CD为汽车空气阻力系数;A为迎风面积;δ为汽车旋转质量换算系数。电机峰值功率Pmax为3个计算功率的最大值。ADVISOR已将整车动力学模型编写在顶层模型中的vehicle<veh>模块中,直接修正调用。本文中依托于国产某后轮驱动SUV,计算最大功率为83 kW永磁同步电机,参数如表3所示。
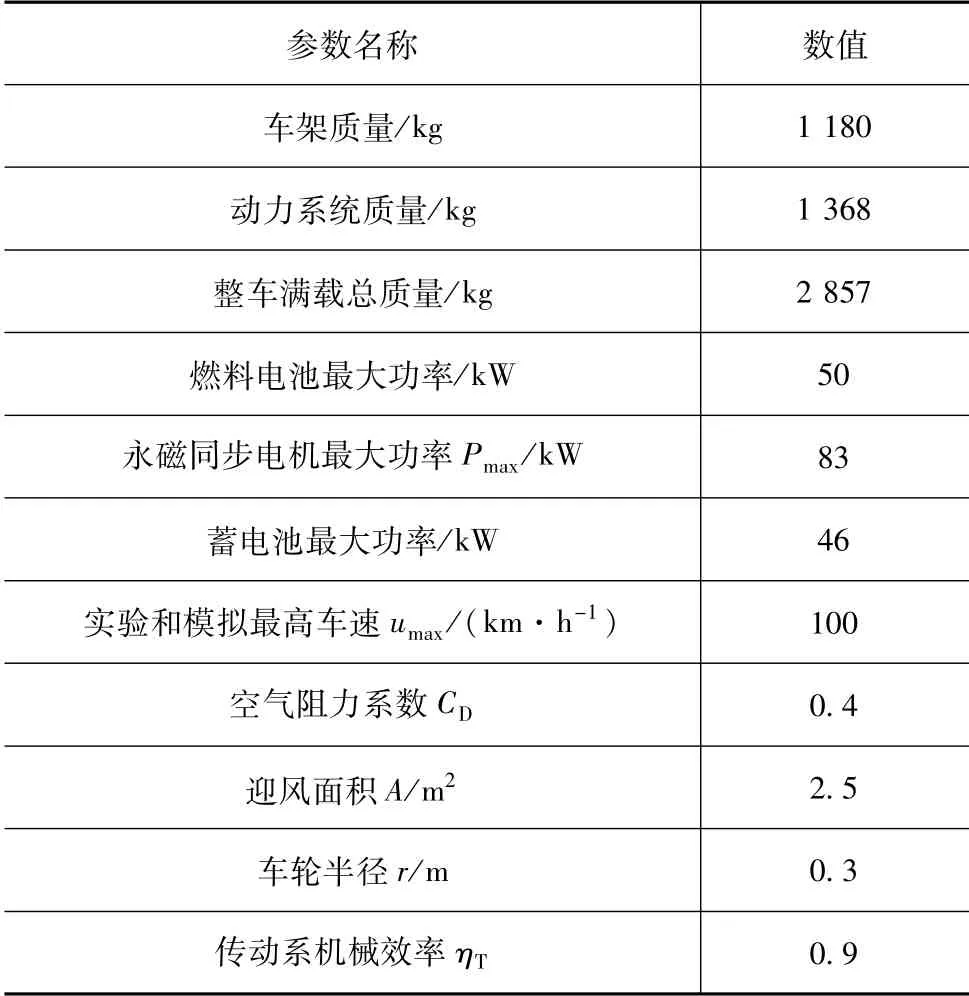
表3 车辆主要技术参数
3.2 燃料电池汽车建模
通过整车参数输入窗口编辑相应部件的m文件从而将数据修正为本文中所设计的燃料电池汽车的基本参数和匹配结果。表3所示为本文中所设计车辆基本参数总结,由于燃料电池系统自身的效率问题,综合考虑取燃料电池系统最优最大输出功率为50 kW,永磁同步电机最大功率为83 kW,考虑1.15倍的余量(一般选取1.1~1.2之间),计算得所需蓄电池的最大输出功率为46 kW。
3.3 燃料电池模块模型
从对整车功率流进行分析的角度出发,本文中采用ADVISOR中基于功率效率的燃料电池模型。该燃料电池系统模型由燃料电池子系统模块、燃料消耗计算和排放子系统模块组成。由整车系统对燃料电池的功率需求为输入,燃料消耗量、燃料电池废气和热排放、电堆实际输出功率为输出。
3.4 基于模糊逻辑能量管理策略模型
本文中制定了基于微小变量T-S模糊逻辑控制,T-S模糊模型前件部分均使用模糊化语言进行变量描述,后件为输入变量的线性组合,每条模糊规则相对应的表达式的结构也是一致的,因此T-S模糊逻辑控制能更方便地进行非线性系统建模和非线性控制系统的设计。本文中选取整车运行电机需求功率Preq和动力电池当前荷电状态SOC作为模糊逻辑的输入变量,燃料电池计算需求功率与电机需求功率的比值系数K作为单一输出变量。针对满足整车行驶功率需求、维持动力电池荷电状态在期望值附近、充分利用动力电池的充放电功能减少氢耗量提高经济性等设计目标,根据实际操作经验和部分文献[10-12],本文中针对CYC-UDDS工况设计如表4所示模糊控制规则库,不同的行驶工况对应合适的规则控制库也不同。
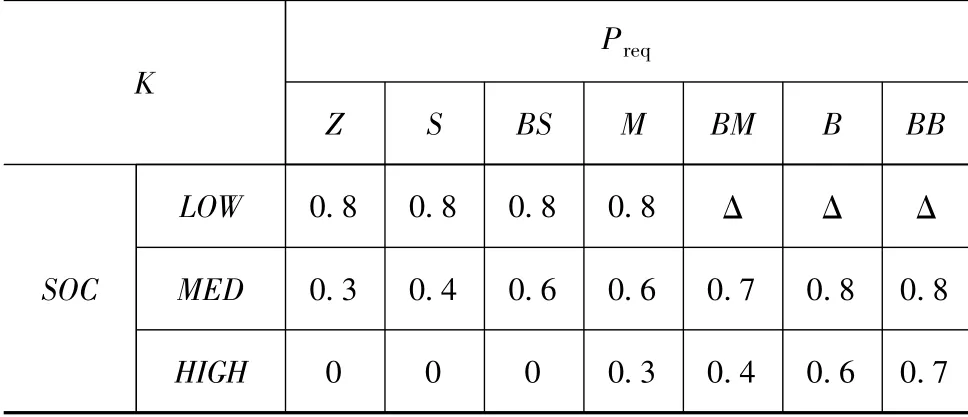
表4 模糊控制规则库
电机需求功率Preq按照从零到最大表述为Z到BB 7个状态,根据本文中仿真循环工况,控制模糊逻辑当SOC为LOW,Preq为较大的BM、B、BB状态时,Δ为大于1的微小变量波动,满足整车行驶需求和低荷电状态下的动力电池微小功率充电。图8所示为依据编写的模糊逻辑规则库的隶属度函数和输出变量示意图。
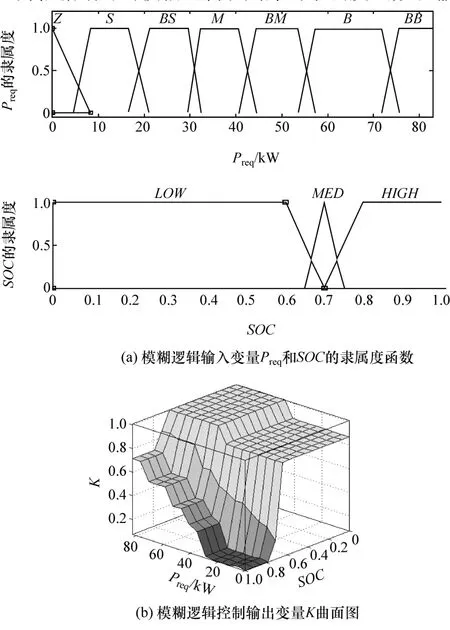
图8 模糊逻辑控制示意图
4 整车性能仿真与模型对比分析
4.1 仿真参数的设置
整车参数如表3所示,车辆主要行驶在城市和城郊道路,所以选择CYC-UDDS工况(图9)对整车性能进行仿真,CYC-UDDS工况的特点统计如表5所示。
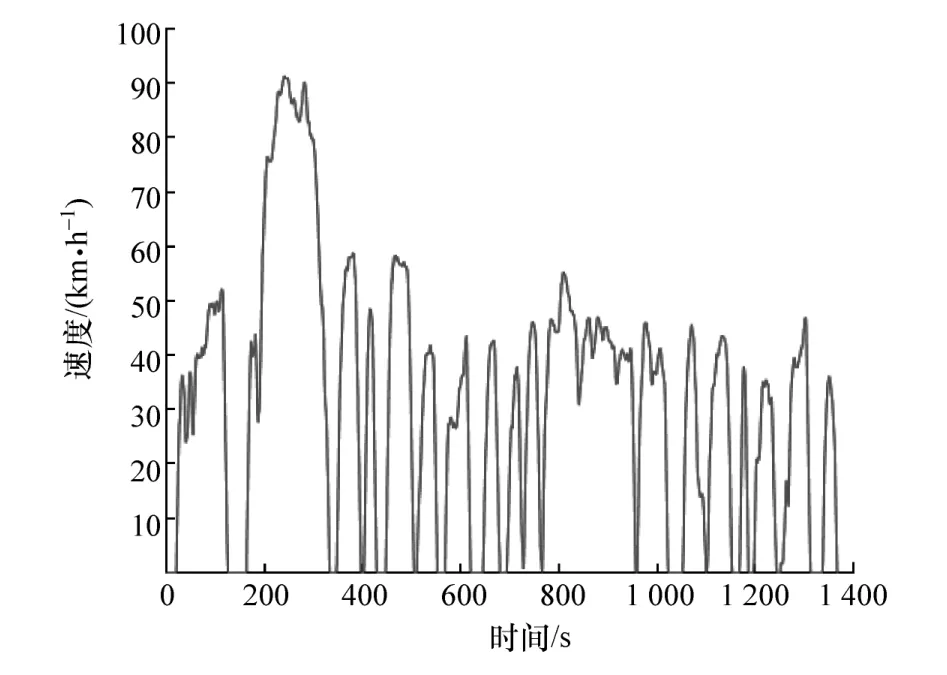
图9 CYC-UDDS工况速度示意图
运用Simulink搭建的基于微小变量模糊逻辑控制的能量管理控制策略模型如图10所示,模型内Saturation模块限制燃料电池最低和最高输出功率,
4.2 整车性能仿真分析
使其工作在较高效率区,模糊逻辑控制器(fuzzy logic controller)模块为调用本文3.4节所规定规则库的模糊逻辑。对ADVISOR进行二次开发仿真所用燃料电池混合动力汽车顶层模型如图11所示,嵌入本文中搭建的模糊逻辑控制策略模型。为能充分展现汽车行驶过程中动力电池各荷电状态下的充放电特性,在初始条件设置中将动力电池初始SOC设为低状态的0.4和中状态的0.7。
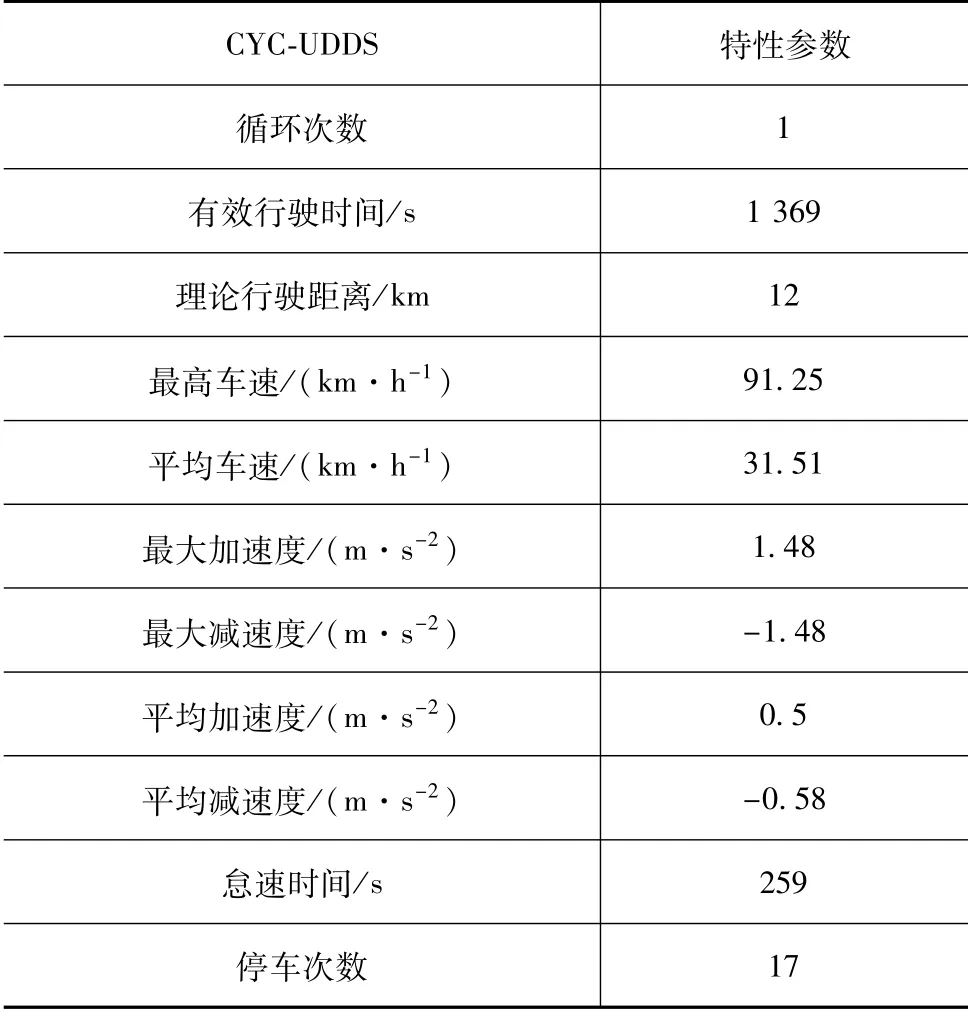
表5 CYC-UDDS工况特点统计
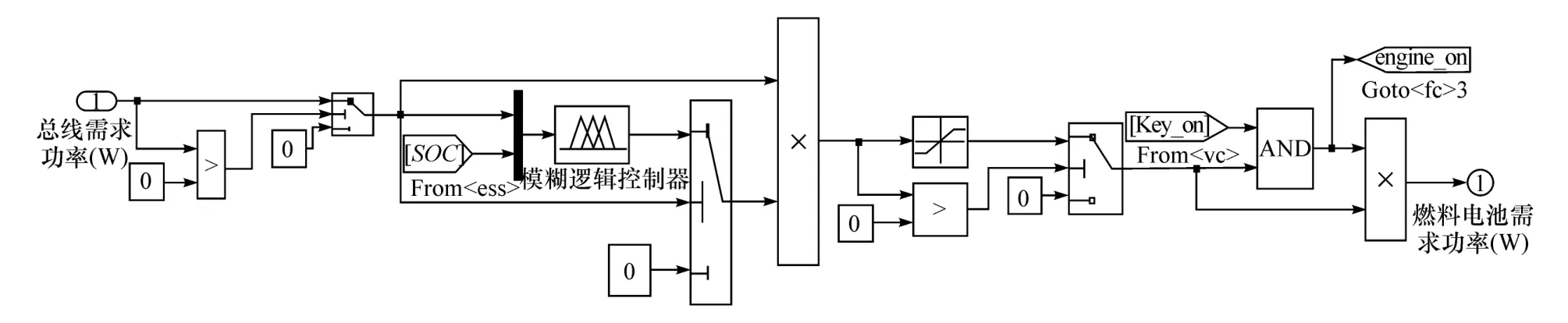
图10 微小变量模糊逻辑控制策略模型
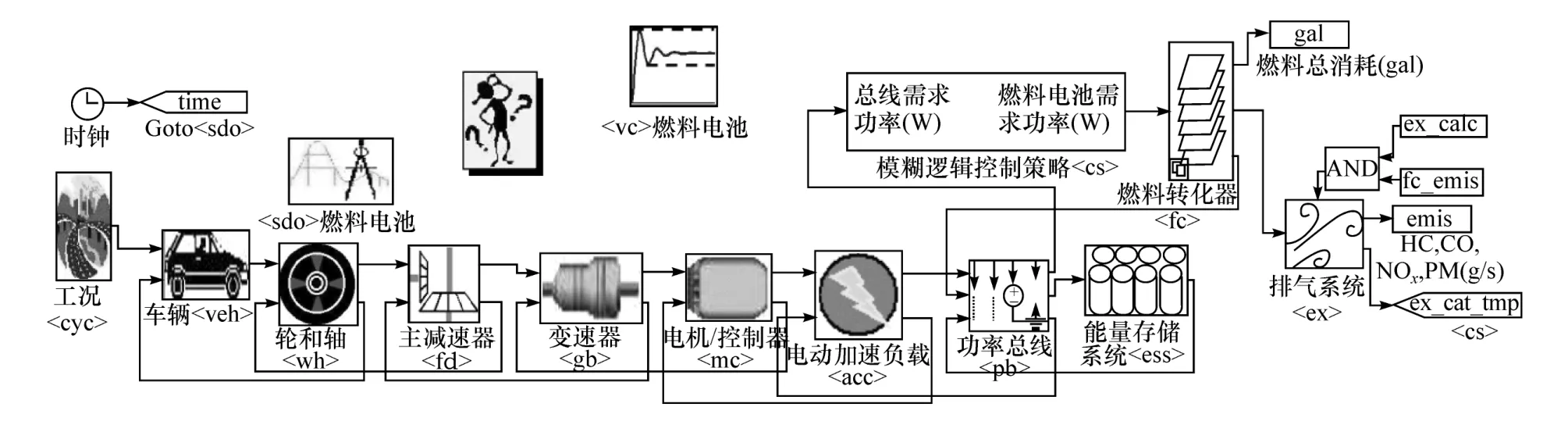
图11 模糊逻辑控制策略燃料电池混合动力汽车仿真顶层模型
ADVISOR燃料电池电 电混动模型中采用传统的功率跟随控制模式,功率跟随模式能够时刻保持燃料电池输出均衡功率Pbalan,为使动力电池时刻处于理想的荷电状态,氢燃料消耗量相对较高。本文中所搭建的模糊逻辑控制策略,旨在满足车辆行驶工况动力性条件下维持低SOC微变增加,降低氢耗量,提高整车效率,进而达到降低经济成本的目的。
4.2.1 功率跟随控制策略仿真分析
图12为功率跟随控制策略动力电池初始SOC为0.4的仿真结果,图中由上到下分别为实际车速与工况要求对比曲线、动力电池SOC历史变化曲线、燃料电池输出功率变化曲线。从仿真结果可看出,该工况和动力电池荷电状态下实际车速满足工况需求,动力电池在低SOC状态下的0.4时,SOC在制动回收能量和燃料电池输出平衡功率Pbalan下稳步增大,整车动力性满足要求。从整车经济性角度出发,该工况下氢燃料消耗率为114.9 L/100 km,整车系统能源利用总效率为0.183,整车运行经济性有待提高。

图12 功率跟随控制策略初始SOC为0.4仿真结果
4.2.2 微小变量模糊逻辑控制策略优化仿真分析
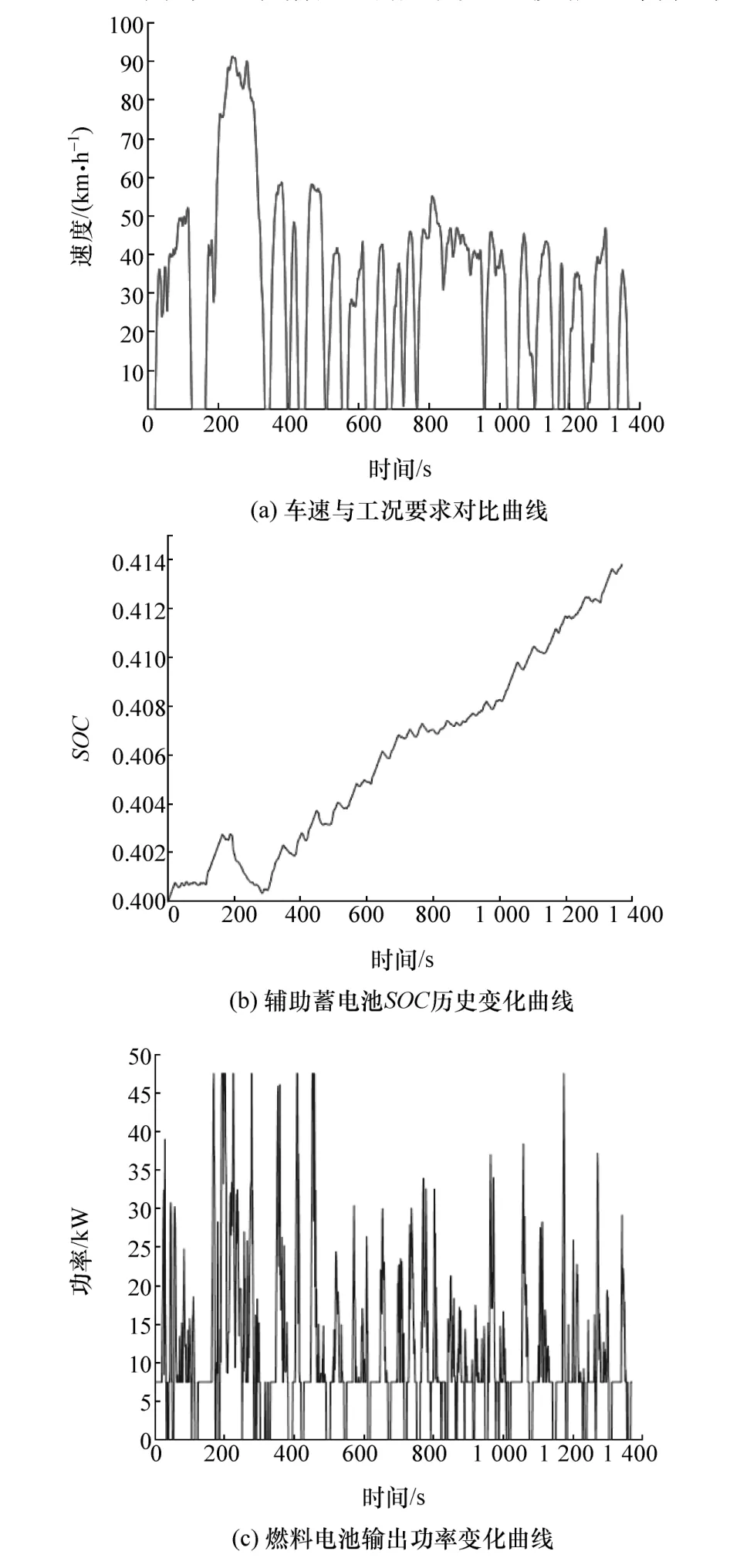
图13 微小变量模糊逻辑控制策略初始SOC为0.4的仿真结果
图13 为本文中搭建的微小变量模糊逻辑控制策略动力电池初始SOC为0.4的仿真结果。从仿真结果可看出,在该工况和动力电池状态下实际车速满足工况需求,动力电池在低SOC状态下的0.4时,模糊逻辑策略控制燃料电池输出微小变量的补偿功率,使SOC在微小涓流功率补偿中微变增大,满足SOC补偿和整车动力性需求。从整车经济性角度出发,该工况和电池荷电状态下氢燃料消耗率为107.5 L/100 km,整车系统能源利用总效率为0.191,整车运行成本较功率跟随控制策略下得以降低。经过实验,由电磁阀控制气瓶组的开闭进而控制氢燃料的供给,燃料电池反应堆在电磁阀关闭后堆内余气作用下可以保持内部一定时间内的状态稳定,电磁阀在实验工况条件下的下一次打开后电堆得以快速响应,因此实验满足工况需求。
图14为微小变量模糊逻辑控制策略动力电池初始SOC为0.7的仿真结果。在该工况和当前动力电池荷电状态下实际车速满足工况需求,动力电池在中SOC状态的0.7时,由控制策略得动力电池输出较大功率,燃料电池输出较小功率满足整车动力性能需求,SOC缓慢减小,最后逐渐稳定在某一合适值。从整车经济性角度出发,该工况和电池荷电状态下氢燃料消耗率为86.4 L/100 km,整车系统总效率为0.208。
图15所示为微小变量模糊逻辑控制策略动力系统效率图,动力电池的工作放电效率稳定在0.98以上,充电效率在0.9左右,动力电池在整个工况行驶过程中具有较高的充放电效率,能够充分利用电能辅助燃料电池驱动汽车行驶,有利于发挥动力电池削峰填谷的优势,燃料电池工作状态稳定于0.48~0.6之间,维持在当前技术条件下较高的利用效率区间,工作稳定可靠,满足设计要求。
4.2.3 控制策略模型仿真对比分析
功率跟随控制策略与本文中搭建的基于微小变量的模糊逻辑控制策略在相同工况和初始SOC状态下经济性测试仿真结果对比如表6所示。从表6对比分析可以得知,在同样满足CYC-UDDS城市和城郊工况整车动力行驶性能的条件下,本文中所搭建的基于微小变量的模糊逻辑控制策略在百公里氢耗量和整车总效率两方面都优于ADVISOR采用的传统的功率跟随控制策略,在低荷电状态下整车运行总效率提高4.3%,在中荷电状态下整车运行总效率提高8.3%。因此本文中所搭建的控制策略模型满足性能要求,经济性能得以提升。
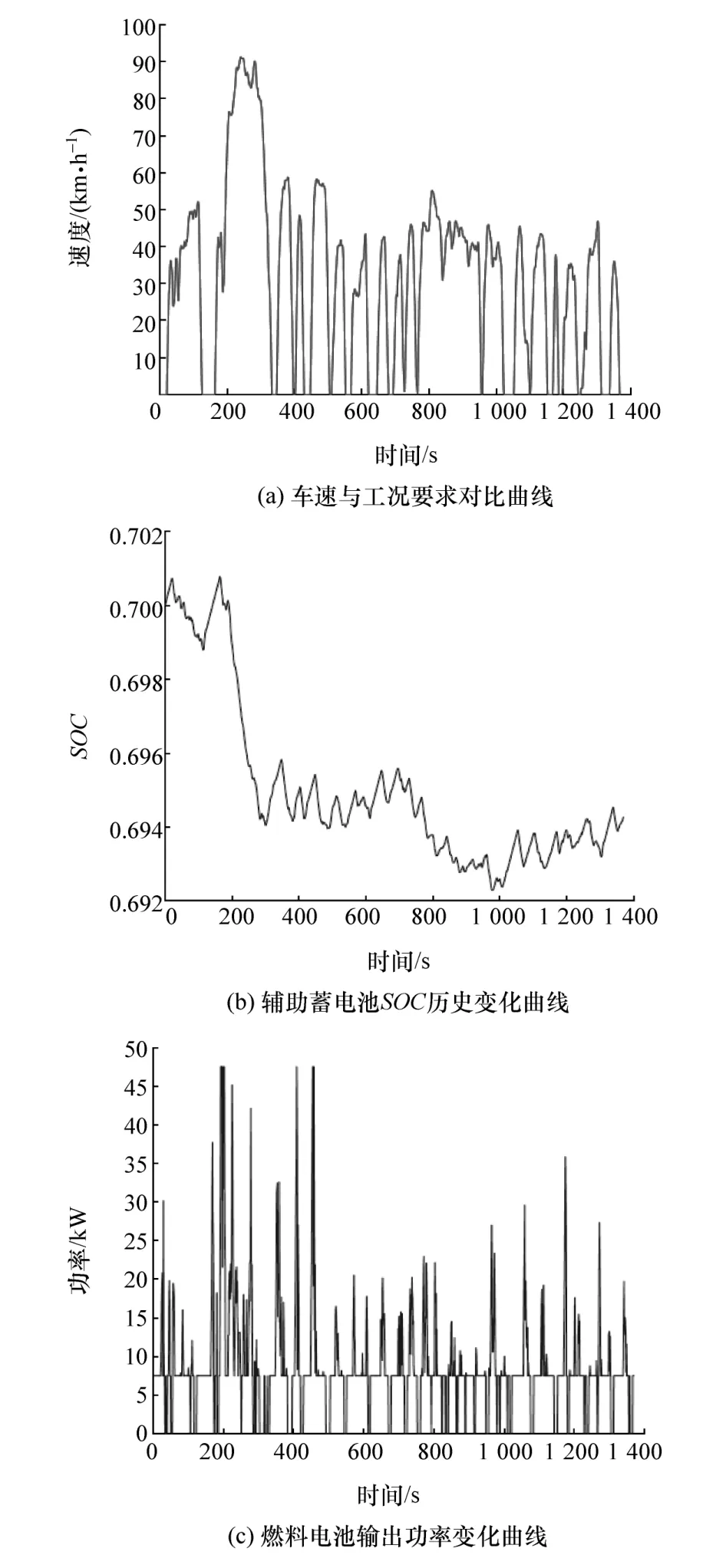
图14 微小变量模糊逻辑控制策略初始SOC为0.7的仿真结果
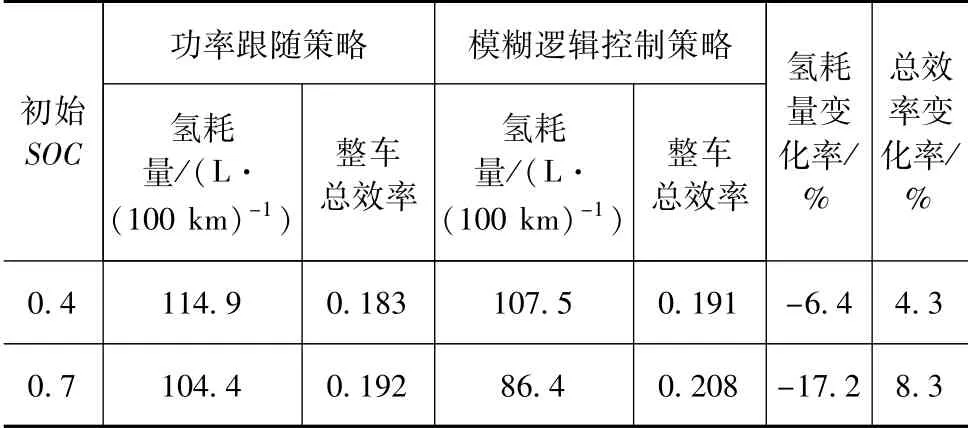
表6 整车燃料经济性测试仿真结果对比
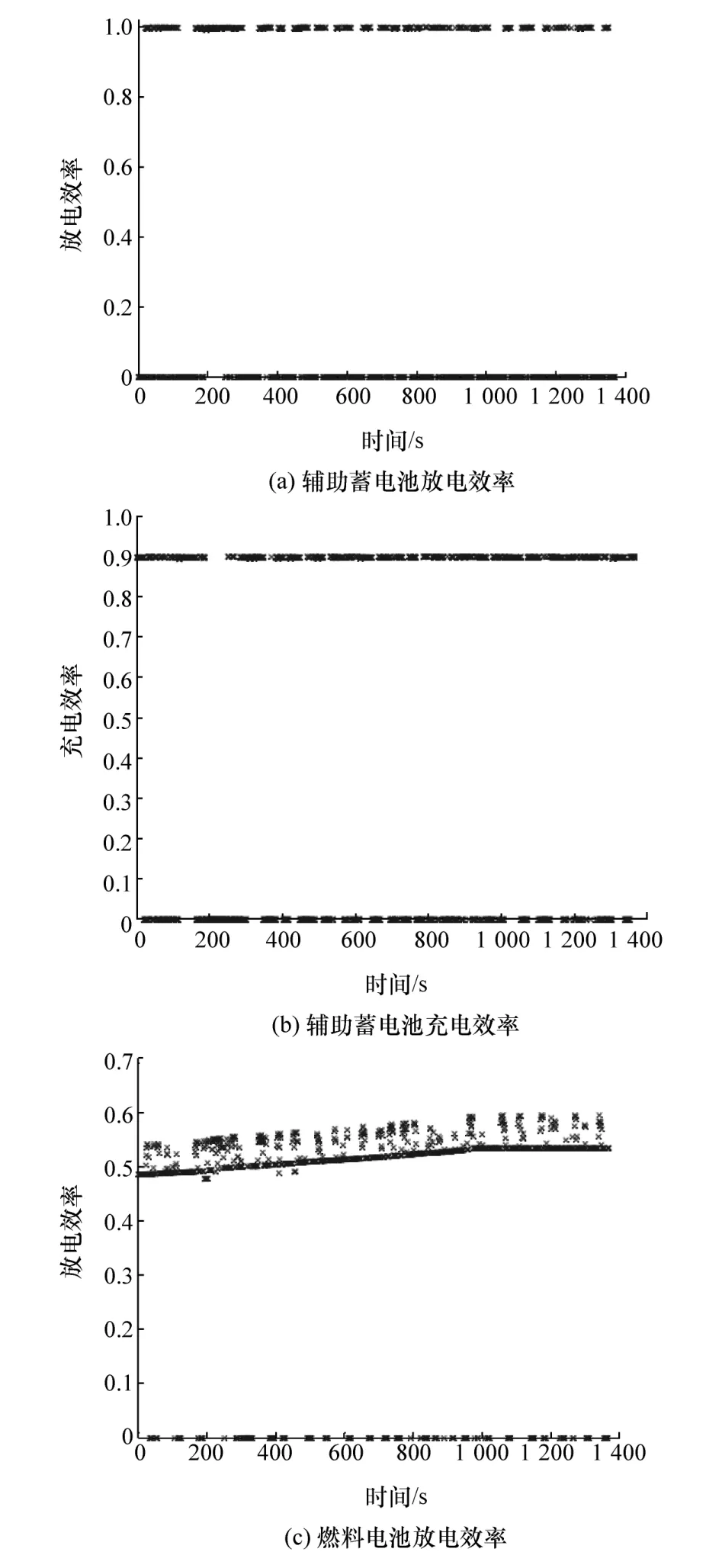
图15 微小变量模糊逻辑控制策略动力系统效率图
5 结论
燃料电池电 电混合动力汽车兼顾了传统汽车续航里程长和新能源汽车清洁高效的优点,是较为理想的过渡车型。本文中从燃料电池和动力蓄电池两个角度出发,阐述了混合动力汽车能量管理策略的含义,针对不同工况搭建了不同规则库的基于微小变量波动的模糊逻辑控制策略模型,对ADVISOR顶层模型进行二次开发优化,动力性能和经济性能满足要求。采用控制气瓶组电磁阀开闭来代替电堆的开闭,燃料电池反应堆在电磁阀关闭后余气作用下可以保持堆内的一定时间内状态稳定,电磁阀在本文实验工况和仿真条件下的下一次打开后电堆得以快速响应,满足实际工况要求。本文中搭建的控制策略对比传统的能量跟随控制策略,氢燃料消耗量降低,整车总效率提高,降低了运行成本,为燃料电池混合动力汽车整车能量控制方法提供了一定的参考依据。
猜你喜欢
消费电子(2022年7期)2022-10-31
汽车实用技术(2022年16期)2022-09-03
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年15期)2022-08-19
汽车实用技术(2022年13期)2022-07-19
汽车实用技术(2022年12期)2022-07-05
汽车实用技术(2022年10期)2022-06-09
汽车工程师(2021年12期)2022-01-17
智富时代(2018年8期)2018-09-28
智富时代(2018年8期)2018-09-28