
基于雷达测距与角位置辅助的SINS空中对准方法
2020-01-07 08:17王连钊吴雯昊李盛新段腾辉
中国惯性技术学报 2019年5期
徐 博,王连钊,吴雯昊,李盛新,段腾辉
(1.哈尔滨工程大学 自动化学院,哈尔滨 150001;2.武汉船舶设计研究所,武汉 430064;3.湖南航天机电设备与特种材料研究所,长沙 410205)
惯性导航系统具有出色的自主性、隐蔽性、短时间精度高和获取完备运动信息等优点,随着导航技术的发展,捷联惯性导航系统正凭借结构简单、体积小、重量轻、成本低、维护简便、可靠性高等优势逐渐代替平台惯性导航系统[1-2]。捷联惯导系统的初始对准的结果对导航精度至关重要[3-4]。初始对准可分为自对准、传递对准和外部信息辅助对准[5]。传递对准需主惯导将导航信息提供给子惯导以辅助其对准[6],对准速度快,精度高,但在特殊飞行环境中不具备主惯导信息。目前常用的飞行中对准方式为全球定位系统(GPS)辅助对准[7],考虑到GPS战时不可用等问题,寻找其他辅助方式来实现特殊情况下捷联惯性导航系统初始对准尤为重要。跟踪雷达是近年来比较成熟的空中目标跟踪定位设备,其测距范围可达数千至数万公里,测角精度较高,且具有连续跟踪、高精度测量和高数据率输出的特点,设置简单,可通过无线传输提供给机载导航系统。
目前对雷达辅助捷联惯性导航系统初始对准的研究并不多,吴枫等[8]研究了在极区条件下的雷达辅助捷联惯性导航系统空中对准,该文章中未对雷达模型进行描述,直接利用雷达输出的地球坐标系下位置信息构建量测量。实际上这一模型是不准确的,随着目标与雷达距离的增加其线性化后的位置误差也会变大,即量测噪声也随之变化。
本文提出一种基于雷达测量斜距与角位置辅助的捷联惯性导航系统空中对准模型,直接采用雷达输出的斜距信息及角位置信息为量测量,利用UKF实现对非线性量测方程的滤波。仿真结果表明,在雷达与飞行器距离较近时,本文所提出的斜距-角位置匹配模型对准方案与现有的位置匹配模型对准方案对准结果相差不大,但在两者距离较远时,所提出基于斜距-角位置匹配模型的对准方案有明显的对准优势。
1 系统方案设计
本文具体方案为舰载雷达对目标飞机定位,并通过无线传输将定位信息传递至目标飞机,通过 UKF滤波器实现机载捷联惯性导航系统(SINS)导航信息与雷达定位信息的融合,实现应急状态下的初始对准。对准方案如图1所示。

图1 雷达辅助捷联惯性导航系统初始对准原理图Fig.1 Principle of SINS initial alignment assisted by radar
2 雷达辅助SINS初始对准状态方程
SINS导航参数误差会随时间积累[9],捷联惯性导航系统误差方程反应了其误差传递关系,利用外部辅助信息通过卡尔曼滤波器对误差状态估计并校正是捷联惯性导航系统初始对准通常采用的办法。建立 15维误差状态方程如下[10]:

其中,

n为导航坐标系,与当地地理坐标系重合;x、y、z轴分别指向东、北、天;b为载体坐标系,x、y、z分别指向载体的右、前、上;分别是纬度位置误差、经度位置误差、高度位置误差,分别是东向速度误差、北向速度误差、天向速度误差;φ为失准角,εb为陀螺测量零漂,∇b为加速度计测量零偏。

其中,Rh=Re+h,Re为地球半径,L为当地纬度,fb是加速度计输出比力。
3 雷达辅助SINS初始对准量测模型
雷达是利用目标对电磁波的反射(或称为二次散射)现象来发现目标并测定其位置的。在雷达的应用中,对目标的定位通常采用极坐标系,如图2所示。其中:Po为雷达所在的载体位置,以其为原点测得空中任意目标P的坐标为P(R,α,β);R称为斜距,是雷达到目标的直线距离;α表示方位角,是雷达与目标连线Po P在水平面上投影Po B与正北方向在水平面上的夹角;β表示仰角,是雷达与目标连线Po P与其水平面上投影Po B在铅垂面上的夹角,也称倾角或高低角。

图2 雷达量测参数描述Fig.2 Radar measurement parameter description
3.1 传统基于位置匹配模型方案的量测方程
为了简化模型通常将雷达的斜距及角位置信息转换为地球坐标系下的位置信息,与惯性导航信息匹配[5]。由图2可得,目标P在Po当地地理坐标系的坐标为

忽略舰船位置误差,可计算得到目标在地球直角坐标系的坐标为
位置量测矢量为

3.2 传统基于位置匹配模型方案的量测噪声描述
上述即是传统雷达辅助 SINS对准的量测方程,其位置量测噪声实质来自雷达测量的斜距误差及角位置误差。令雷达输出的斜距及角位置信息为其中,为符合零均值高斯分布的白噪声,由式(2)可得:

展开并忽略二阶噪声项得:

其中,

从以上推导可知,量测噪声V并不符合标准卡尔曼滤波器对量测噪声的要求。V的方差会随斜距R的增加而增大,当距离较大时量测信息质量会很差,对滤波器不利[11]。
3.3 基于斜距-角位置匹配模型方案的量测方程
从上述分析中可以看出斜距误差、角位置误差传递至量测量处使方差与斜距相关,应采用自适应滤波进行估计。本文则通过构建新的量测量来避免这一问题。
令捷联惯性导航系统解算位置为

式中,Lp、λp、hp为飞机所在真实位置。则捷联惯性导航系统解算位置在地球直角坐标系的位置坐标为
记
以雷达输出的斜距及角位置为量测量,则Z=根据式(10)~(13)有:

式中,wR、wα、wβ为符合零均值高斯分布的白噪声。由于量测方程是非线性方程,因此需采用非线性滤波处理[12],本文利用UKF算法实现雷达测距与角位置辅助的SINS空中对准过程的信息融合。
4 仿真验证
4.1 仿真参数设置
由于舰船位置、姿态由舰船惯性导航设备及辅助设备组合提供,其位置误差及姿态误差均可忽略不计,为简化仿真复杂程度,考虑舰船为静止状态,且其提供的“真北”无误差。雷达所在高度为 5 m,更新周期为1 s,滤波器滤波周期为1s,滤波器采用闭环校正,仿真时间设置为300 s;飞行速度为80 m/s,飞行高度为1000 m。为实现快速对准,本文设计仿真轨迹为盘旋运动。
4.2 仿真结果与分析
由前文分析可知,传统位置匹配模型方案量测噪声统计特性与飞机和雷达之间距离相关,当距离较近时量测噪声协方差较小,而距离较远时量测噪声协方差会较大。而本文提出的基于斜距-角位置匹配模型方案理论上并不受这一影响,为验证这一问题,本文分为小于10 km、23~25 km、大于50 km三个距离范围进行仿真验证,并与传统位置匹配模型方案对比说明本文所提斜距-角位置匹配模型方案更具应用价值。
4.2.1 斜距小于10 km仿真结果分析
图3~8分别为雷达与捷联惯性导航系统之间斜距小于10 km、20~25 km、大于50 km条件下的200次蒙特卡洛分析仿真对准结果图,其中,蓝色细实线为采用传统位置匹配模型方案的均值曲线,蓝色细点线为采用传统位置匹配模型方案的3σ曲线,红色粗实线为斜距-角位置匹配模型方案的均值曲线,红色粗点线为斜距-角位置匹配模型方案的3σ曲线,分别为纵摇误差角、横摇误差角和航向误差角。
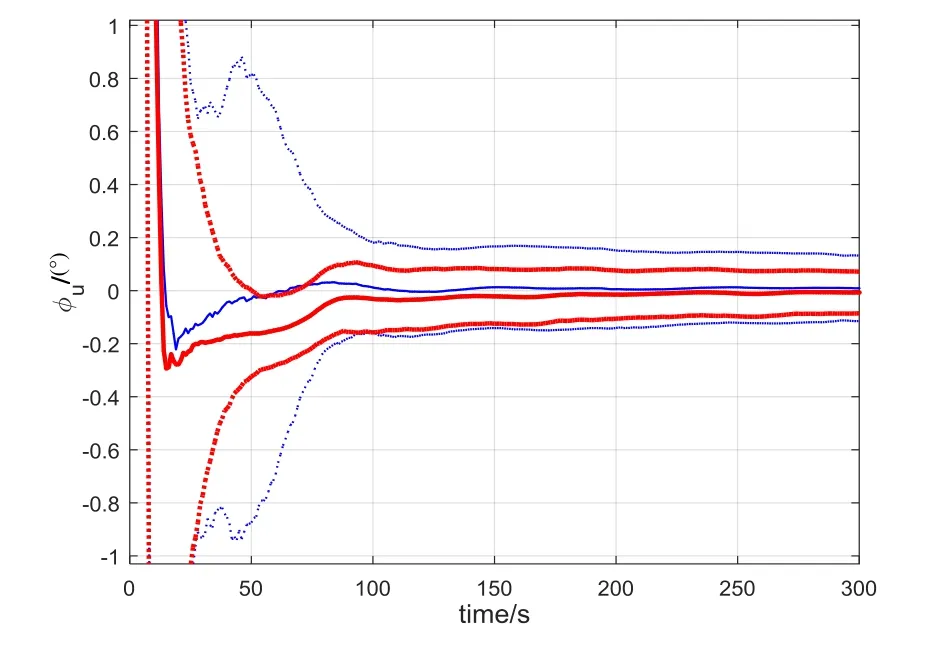
图3 斜距小于10 km时方位误差角结果Fig.3 Results of azimuth error angles in slant distance less than 10 km
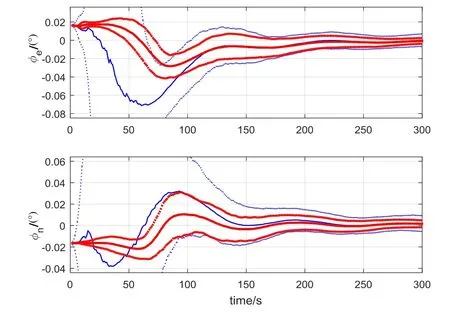
图4 斜距小于10 km时水平误差角结果Fig.4 Results of horizontal error angle in slant distance less than 10 km
图3、图4是斜距在10 km以内的仿真结果,由上面分析可知,传统位置匹配模型方案因为目标与雷达距离较近,量测噪声并没有被明显放大,图3也显示出其航向误差均值收敛速度较本文所提出的斜距-角位置匹配模型方案更快,精度也较高。但是从多次实验的统计结果可以看出斜距-角位置匹配模型方案航向误差标准差更小,分布较为集中,且精度高,曲线收敛时间与传统位置匹配模型方案相同。
水平误差曲线在图4中给出,两种匹配模型水平对准过程中均有震荡,斜距-角位置匹配模型方案无论是均值曲线还是3σ曲线均能较快的平稳,且标准差更小。传统位置匹配模型方案与斜距-角位置匹配模型方案在斜距小于10 km时均具有较高的收敛精度,较快的收敛时间。
4.2.2 斜距为20~25 km仿真结果分析
雷达与捷联惯性导航系统的斜距在 20~25 km之间的航向误差曲线如图5所示。可以看出在这一条件下传统位置匹配模型方案均值仍有较高精度,但是其3σ曲线在300 s时仅能达到1°以内的精度,而本文中提出的斜距-角位置匹配模型方案均值同样有较高精度,其3σ曲线收敛也较快,在120 s处就具有0.2°以内的精度,在300 s时接近0.1°。在统计意义上较传统位置匹配模型方案有更稳的对准结果及更高的对准精度。

图5 斜距为20~25 km方位误差角比较Fig.5 Results of azimuth error angle in slant distance between 20 km and 25 km
图6为斜距为20~25 km时水平对准误差角比较,可以看出,斜距-角位置匹配模型方案在水平对准中均值曲线及 3σ曲线能较快的平稳,200次仿真结果在300 s时对准精度几乎都在0.01°以内。而传统位置匹配模型方案虽然均值有较高精度,但是其横摇误差3σ曲线仅在 0.05°,纵摇误差 3σ曲线也较斜距-角位置匹配模型方案差。
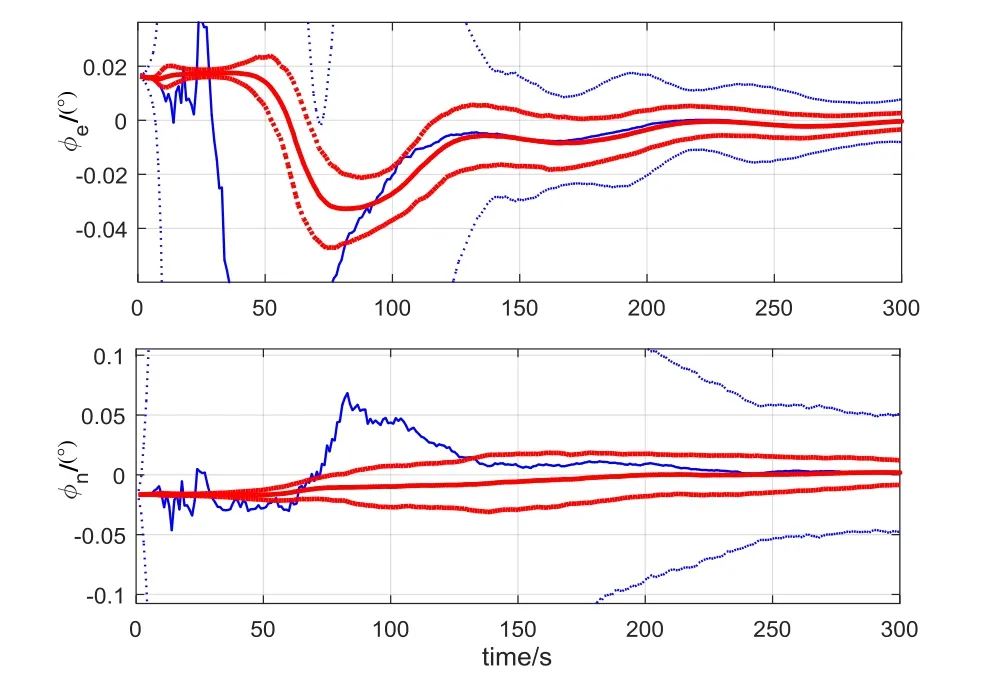
图6 斜距为20~25 km水平误差角比较Fig.6 Results of horizontal error angle in slant distance between 20 km and 25 km
4.2.3 斜距大于50km仿真结果分析
从图7可以看出,当斜距大于50 km时,传统位置匹配模型方案航向误差角3σ曲线在300 s仅能达到2°,较斜距在20~25 km条件下变大一倍。而本文提出的斜距-角位置匹配模型方案具有精度较高的均值曲线,同时航向误差 3σ曲线收敛较快,300 s时收敛精度上确界达到0.1°,下确界在-0.2°以内,同20~25 km条件下相差不多。

图7 斜距大于50 km方位误差角比较Fig.7 Results of azimuth error angle in slant distance more than 50 km

图8 斜距大于50 km水平误差角比较Fig.8 Results of horizontal error angle in slant distance more than 50 km
从图8中可以看出:当斜距大于50 km时,传统位置匹配模型方案纵摇对准统计均值较好,但是300 s时收敛精度上、下确界为±0.05°左右,横摇误差角不稳定,300 s内其收敛精度较低;斜距-角位置匹配模型方案纵摇误差角均值曲线及3σ曲线比较平稳,收敛精度较高,同时横摇误差角均值较平稳,3σ曲线也具有较高的收敛精度。
从以上分析可知,本文提出的斜距-角位置匹配模型对准方案相对传统位置匹配模型方案具有更高的收敛精度,更短的收敛时间。从整个时间段看,所提斜距-角位置匹配模型方案统计结果曲线较为平稳,无较大震荡。同时在斜距变大情况下其收敛精度影响较小,能保持较高的对准精度。
4.2.4 对准结果统计对比分析
3组200次蒙特卡洛分析仿真300 s时航姿对准结果在表1~3中给出。从表1中可得:斜距-角位置模型方案在不同斜距下航向对准误差均值在0.03°以内,标准差为0.0262°至0.0384°;在斜距为10 km以内时,其对准误差上界为0.0603°,对准误差下界为-0.0779°,均在0.1°以内;而斜距在20~25 km及大于50 km时,其对准误差最大值分别为0.1300°和-0.1421°。传统位置匹配模型方案在三组斜距下统计对准结果相差较大,可以看出随着斜距增加,其标准差也不断变大。在小于10 km条件下,传统位置匹配模型方案统计对准结果上、下界在0.1°左右;而斜距在20~25 km及大于50 km条件时,传统位置匹配模型方案对准结果标准差均大于0.1°,在大于50 km条件下,其统计上、下界分别达到了1.5431°和-2.1350°。
从表2中可知,本文所提出斜距-角位置匹配模型对准方案的纵摇误差角几乎不受斜距变化的影响,在300 s时统计均值几乎为 0°,标准差最大为 0.0016°,统计的上、下界在0.0025°至-0.0060°之间精度较高;而传统位置匹配模型在小于10 km和20~25 km条件时具有较高的对准精度,统计上、下界在0.0080°至-0.0077°之间,在斜距大于50 km条件时,其标准差达到0.0099°,对准误差统计上、下界分别为0.0285°和-0.0266°。
两种模型的横摇误差角均比纵摇误差角差,两种模型在小于10 km和20~25 km条件时均值在0.0016°至0.0018°之间,在大于50 km条件时传统位置匹配模型对准统计均值为 0.0011°,斜距-角位置匹配模型统计均值为-0.0036°。不同斜距条件下斜距-角位置模型方案对准标准差分别为 0.0011°、0.0034°、0.0042°,对准的上、下界在0.0124°至-0.0130°之间有较高的对准精度;传统位置匹配模型方案统计均值较小,但是随着斜距的增加统计标准差也会变大,在20~25 km条件下标准差达到了0.0163°,斜距大于50 km条件下标准差达到了0.0307°,反映出传统位置匹配模型方案对准结果分布较广,精度差。

表1 300 s航向角对准误差统计结果Tab.1 Statistical results of heading angle alignment error at 300 s

表2 300 s纵摇角对准误差统计结果Tab.2 Statistical results of pitch angle alignment error at 300 s
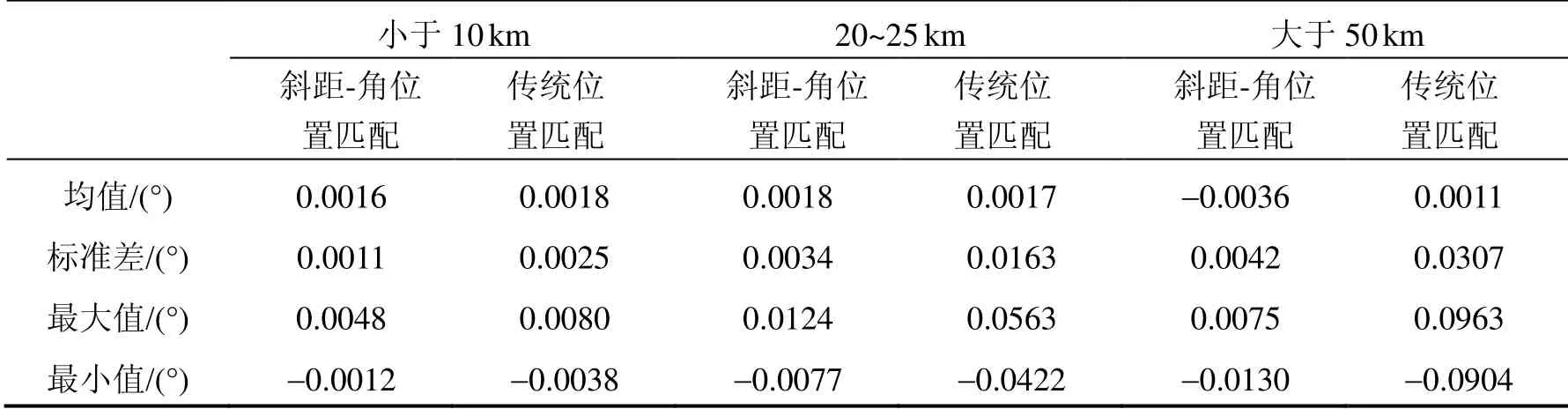
表3 300 s横摇角对准误差统计结果Tab.3 Statistical results of roll angle alignment error at 300 s
以上结果与 3.2节中分析一致,即随着斜距的增加,位置信息量测误差也变大,使传统位置匹配模型方案状态估计较差,对准精度较低。而在斜距-角位置匹配模型的量测误差协方差不随着斜距的增加而变大,但是其为非线性模型,采用非线性滤波后状态估计精度较高,对准精度也比传统位置匹配模型方案高。
5 结 论
本文对雷达辅助条件下捷联惯性导航系统初始对准进行了分析,以雷达提供的斜距及角位置为基础,推导出传统位置匹配模型方案线性化后量测噪声变化的缺陷,并提出一种斜距-角位置匹配模型对准方案,以斜距及角位置为量测信息实现对准,最后通过三组不同斜距条件下的仿真实验验证了所提出的方案。在斜距较小时,本文所提出的斜距-角位置匹配模型方案较传统位置匹配模型方案对准结果略好,这一条件下两者都能实现飞行中对准。当距离较大时,传统位置匹配模型方案会产生较大的对准不确定性,对准结果较差,而本文所提出的斜距-角位置匹配模型方案有更好的对准结果。在斜距大于50 km条件下,斜距-角位置匹配模型方案航向误差角统计均值为-0.0289°,标准差为0.0377°,同时有较高的水平对准精度。综上所述,斜距-角位置匹配模型方案能有效地实现飞行中初始对准功能,且具有较高的工程应用价值。
猜你喜欢
舰船科学技术(2022年10期)2022-06-17
军民两用技术与产品(2021年7期)2021-10-13
湖北农机化(2020年4期)2020-07-24
专用汽车(2018年10期)2018-11-02
当代陕西(2018年12期)2018-08-04
北京航空航天大学学报(2017年5期)2017-11-23
北京航空航天大学学报(2017年12期)2017-04-23
火控雷达技术(2016年1期)2016-02-06
探测与控制学报(2015年4期)2015-12-15
导航定位学报(2015年2期)2015-06-05
