波动制造环境下考虑学习遗忘效应的人员柔性仿真
2020-02-13 09:17王奕祺张晓冬
计算机集成制造系统 2020年1期
王奕祺,张晓冬
(北京科技大学 东凌经济管理学院,北京 100083)
0 引言
制造和信息等技术的迅速发展加剧了生产企业间的竞争,导致企业对产品生产效率的要求越来越高。此外,客户对于产品的需求日趋多样化和个性化,使得当前生产制造活动的外部环境存在较大的波动性[1-2]。在这种波动环境下,企业在关注效率的同时还必须关注系统柔性[3],使得生产系统具备快速适应环境波动的能力。
在生产系统中,人员柔性通常指人员的多技能水平,可通过技能培训、岗位轮换、自治生产、团队协同等方式获得[4-5]。人员柔性可以为人员安排、人机配合带来较高的灵活性,是系统柔性的重要组成要素。当人员的生产效率不变时,人员柔性高则系统应对环境波动的能力强。例如在频繁换线的情况下,具有多技能水平的员工显然更容易适应产品变化,从而保障生产顺利进行。然而,在实际生产中,通过扩展生产人员技能的方式提高人员柔性往往会导致生产人员所完成任务的种类较多,且每种任务的工作量较少。根据生产者的学习—遗忘效应,任务类型的多样化趋势可能会导致生产者的学习过程变长、熟练过程变缓,从而影响生产效率。因此,研究人员柔性对生产系统的影响,必须在考虑人员适应性的同时考虑学习—遗忘效应。为此,本文提出了波动制造环境下考虑学习—遗忘效应的人员柔性仿真研究。
在生产系统中对于人员柔性的研究已经形成了很多有价值的成果。其中,Davis等[6]通过建立离散事件仿真(discrete-event simulation)模型研究了工作负荷失衡程度对员工柔性需求的影响,研究结果表明当工作负荷高度失衡的情况下,如果人员相对设备的配置比例较高,则高水平的人员柔性配置不具备经济性。林仁等[7]基于所提出的资源—能力矩阵对人员柔性进行了定量化描述,建立了人员柔性约束下的作业车间调度问题模型,证明人员柔性程度对调度效果具有显著影响。Ferjani等[8]在生产系统动态指派问题中添加了人员疲劳模型,并通过仿真方法进行实验分析。实验结果表明提高人员柔性可缩短平均生产时间,最多的人员数量和最高人员柔性的配置下人员的疲劳水平最低。上述研究虽然探讨了人员柔性对生产系统绩效的影响,但因为忽略了人员的学习—遗忘效应,所以取得的结论不够全面。
目前,也有少数对于人员柔性的研究考虑了学习—遗忘效应。例如,Yue等[9]利用EM-Plant仿真软件对双资源约束生产线进行离散事件建模,且以平均生产时间作为评价指标。实验结果表明,在人员技能数量分布不均的情况下,产品生命周期较长时应培训慢速学习者掌握更多技能,生命周期较短时应培训快速学习者掌握更多技能。Azizi等[10]提出了一种用于解决工人任务分配问题和制定培训计划的数学模型,研究结果表明工人轮换间隔的长度对总成本有显著的影响,间隔越短则总成本越高。Nembhard等[11]使用离散事件建模方法研究了人员柔性在不同轮换间隔水平下对生产效率的影响,仿真结果表明较短的间隔在总体上表现更好,将高度人员柔性和较长轮换间隔相结合时的生产效率最低。
在研究方法上,上述研究多采用数学规划方法或离散事件仿真方法。由于生产系统中存在着大量的随机性、离散事件和非线性关系,导致采用数学规划方法所建立的数学模型难以描述实际生产过程[12]。通过离散事件方法所建立的仿真模型虽可以更全面地描述生产过程,但在模型中将人员视为一种类似机器的被动型资源,无法体现人员的微观行为和交互行为,因此导致模型运行结果和实际数据存在较大的误差[13]。
针对上述问题,本文提出采用离散事件和智能体混合建模的方法构建生产系统混合仿真模型,从而实现波动制造环境下考虑学习—遗忘效应的人员柔性仿真。由于这种建模方式在继承离散事件建模优点的基础上使得模型基本元素具有更高的主动性、自治性和智能性,更适合对人员的学习—遗忘效应和自治性、人员之间以及人员与环境之间的相互作用进行描述,仿真输出的指标也较单一的建模方法更加丰富。
1 混合仿真模型
由于生产过程的有序性,大多数离散生产过程都是根据产品的生产工艺,采用离散事件仿真方法进行研究。而要描述生产系统中具有自治性和分布决策功能的生产者,则适合采用基于智能体的仿真(agent-based simulation)方法。因此,本文采用离散事件和智能体混合建模的方法来构建人机集成生产系统的仿真模型。
1.1 混合仿真模型框架
混合仿真模型的框架如图1所示,框架由生产过程模型、智能体模型和混合模型集成接口3个部分组成。下文将根据框架介绍3个组成部分的功能以及混合仿真模型的运行逻辑。

(1)生产过程模型通过收集生产系统中的设施布局、各产品类型的工艺路线、人员和传送装置的移动路线、订单信息等,利用离散事件建模方法和机器智能体实现对生产过程的描述。
(2)智能体模型包括对生产者、机器以及协调者的描述:①生产者智能体具有与技能相对应的生产行为能力和对于任务选择的偏好,并可根据通讯协议与协调智能体进行交互。特别地,为了研究生产者的学习—遗忘效应,在智能体内部集成了学习—遗忘模型。②多个生产者智能体构成智能群体,而群体在任务申请过程中存在多人申请同一任务的潜在冲突。通过构建的协调智能体可实现向生产者智能群体发布生产任务信息、接收反馈信息、协调潜在冲突并最终完成任务指派。③机器智能体可通过事件触发机制检测原料(在制品)的加工状态(如机器空闲且存在待加工产品需要装载操作、数控加工完成后需要卸载操作、卸载完成后需要换线操作等),并将生产状态信息发送至混合模型集成接口。
(3)混合模型集成接口用于实现生产过程模型与协调智能体之间的通信,向协调智能体传递生产状态数据,以及向生产过程模型返回生产者智能体的行为输出结果。
混合仿真模型以生产过程模型作为运行主线,具体逻辑为:①依据生产计划导入订单信息,启动生产过程;②生产过程模型中的机器智能体通过事件触发机制检测到当前产生的任务需要生产者智能体参与,并通过混合模型集成接口将生产状态数据发送至协调智能体;③协调智能体向生产者智能群体发布生产任务信息,群体中所有个体通过推理向协调智能体反馈信息;④协调智能体根据反馈信息协调冲突和完成任务指派,再通过混合模型集成接口驱动生产者智能体参与生产过程,实现人机协同生产;⑤重复步骤②~步骤④,直至完成所有生产任务。
1.2 生产者智能体的行为逻辑
生产者智能体的行为逻辑可通过状态图(state diagram)来描述,从而刻画智能体在各状态下变迁至另一状态的动态过程。
以生产者掌握装载、卸载和换线技能为例,状态图如图2所示。状态图的进入点为“等待任务”状态,生产者一旦接收到来自协调智能体所发布的任务信息,将触发“任务申请”变迁,变迁中的行动为向协调智能体反馈信息;当收到来自协调智能体发送的任务确认信息时,生产者将领取任务并根据任务类型变迁至新的状态;生产者根据任务信息移动到机器处开始执行任务,在根据学习—遗忘模型计算所得的工时消耗后变迁至“完成任务”状态;判断当前是否为下班时间,如果“不是”,则生产者变迁至“请求分配任务”状态并向协调智能体发送请求,如果“是”则生产者先变迁至“下班”状态,当仿真时间进入上班区间时再变迁至“请求分配任务”状态;接收到协调智能体的反馈信息后,生产者判断是否领取到新任务,如果“是”则根据任务类型变迁至新的状态,如果“不是”则进入初始的“等待任务”状态。

1.3 生产者智能体的学习—遗忘效应
生产过程中人员的学习效应最早由Wright提出,其通过发现工人完成单件产品的工时消耗按一定的指数关系随累计产量的增加而减少,由此总结出了学习曲线[14],并得到广泛应用。学习曲线适用于生产不间断的情况,而在生产中断的情况下,还必须考虑工人的遗忘效应。为此,Carlson等[15]提出了VRVF(variable regression to variable forgetting)学习—遗忘模型。在VRVF模型中,用学习量来描述生产过程中学习和遗忘效应的共同结果。该模型假定遗忘与中断前的学习量、遗忘率和中断时间相关,并通过一个衰减函数来表示。这一假定逐渐被相关研究得出的结论所印证[16],使得该模型被后续研究者广泛采用。
因此,本文也采用VRVF模型描述生产者智能体的学习—遗忘效应。式(1)描述了生产者智能体在学习—遗忘效应的共同作用下的学习量(即加工数量):
(1)
式中:Xn代表生产者加工第n件产品时的学习量;ε为加工第n+1件产品与第n件产品之间的中断时间可完成的产品数量;L和F分别代表学习和遗忘系数,取值通常均为0.8~0.9之间。由式(1)可以看出,当持续生产时,学习量每次以1为增量增加,此时没有遗忘效应,只有学习效应;发生生产中断后,学习量将产生一个衰减,从而刻画出学习和遗忘的共同效应。
接下来还应该将学习量转换为生产者智能体的工时消耗,从而在仿真中体现学习—遗忘效应。式(2)给出了如何根据学习量来计算生产者智能体完成任务的工时消耗:
(2)
式中:Yn代表智能体加工第n件产品的工时消耗;U代表初始工时消耗(即第一件产品的工时消耗);a代表最低工时消耗,a的取值通常为U的25%~50%[9]。由式(2)可以看出,工时消耗介于最低工时消耗a和初始工时消耗之间。在持续生产的情况下,式(2)中学习量Xn没有遗忘效应,工时消耗的计算只体现学习效应;在生产中断的情况下,式(2)中学习量Xn在式(1)的计算中考虑了遗忘效应,这也是合理的。
2 仿真输入、输出及实验方案
2.1 仿真输入
本文的目标为研究在不同的环境波动水平下,人员柔性水平对于生产系统绩效的影响。首先需要对生产环境的波动水平及人员柔性进行定义,并将二者作为仿真的输入部分。
2.1.1 波动水平
制造系统的波动可分为制造环境内部和外部波动,内部波动包括资源波动、人员波动、设备波动等;外部波动包括客户需求波动、采购波动等。为便于实验设计,本文采用需求的波动来描述波动制造环境,即在一段时间内,订单批量大小以及换线总次数的变化情况。根据波动的剧烈程度,将制造环境的波动水平用整数d(d=1,2,…,D)来表示。
2.1.2 人员柔性
首先,定义每一种操作技能的冗余度z为掌握该技能的人员数p减去1,即
z=p-1。
(3)
在制造系统中,对于不断变化的制造环境,如果每一种操作技能有越多的冗余度,且各项操作冗余度的分布越均匀,则有更多的人员能够被灵活地安排到各操作中,从而使系统受到变化的干扰越小,也即该系统的人员柔性越高。由此可以定义人员柔性f值来描述人员柔性的高低,如式(4)所示:
(4)

2.2 仿真输出
仿真的输出为一系列评价指标,用于描述输入对生产系统绩效的影响。基于工作设计理论,人员柔性对系统绩效的影响主要体现在系统效率和系统柔性两个方面。由于本文特别关注了学习—遗忘效应,因此在这两个指标的基础上又加入了团队学习水平的指标。
(1)生产效率指标 用生产周期来描述系统效率,以Td表示,代表波动水平d下剔除下班时间之后的系统有效生产周期(简称生产周期)。
(2)系统柔性指标 用生产系统对所有生产环境的综合适应能力来描述系统柔性,以σT表示。σT可通过计算不同波动环境下生产周期的标准差得到,如式(5)所示,σT越小表示系统柔性越高。
(5)
(3)单个任务学习水平 设某任务初始工时消耗为U,实际完成任务时加工了n件产品,则用初始工时消耗为U与工时消耗Yn的比值来描述单个任务的学习水平,以r表示,如式(6)所示,其中,Yn可通过式(2)计算。
r=U/Yn。
(6)
(4)团队学习水平 用生产周期内所有单个任务学习水平的均值来衡量整体学习水平,以R表示,如式(7)所示:
(7)
式中:h表示某任务序号,rh为序号为h的单个任务学习水平,H代表任务数量。
2.3 实验方案
本文仿真实验方案基于所构建的生产系统混合仿真模型,通过改变所输入的生产环境波动水平和人员柔性水平,来考察输出指标的变化,从而得到在波动生产环境下,人员柔性水平对生产系统绩效的影响关系,如图3所示。

3 案例研究
本文将所提出的仿真方法用于某机加零部件生产系统的人员柔性研究。该生产系统主要生产3个类型的箱体类零件,编号分别为BXT、FGT和FXT。其中,BXT为变速器箱体,FGT为发动机缸体,FXT为发动机箱体,每类零件下又细分为若干种规格的零件。该生产系统的订单需求多变、批量大小不稳定、生产线切换频繁,是典型的波动环境下多品种、小批量的生产模式。该生产系统配备了18台数控机器(M1~M18)、9名装卸人员(W1~W9)、2名换线人员(C1、C2)、自动化传送装置等。由于生产环境的波动,该生产系统迫切需要通过轮岗培训来改进人员柔性,从而提高生产系统应对变化的能力。但以往的人员柔性的配置大多基于经验进行,缺乏科学和定量的依据。为此,采用本文提出的仿真建模方法建立了该生产系统的混合仿真模型,在综合考虑生产环境波动和人员学习—遗忘效应的情况下,研究人员柔性配置对生产系统的影响,从而辅助该生产系统进行组织设计的决策。
3.1 生产系统基本信息
据调查,BXT的工艺路线为M1→M2→M3→M4→M5→M6→M7→M8→M9→M10;FGT的工艺路线为M11→M12→M13→M14→M15→M16→M17→M18;FXT的工艺路线为M11→M12→M1→M2→M3→M4→M13→M14→M5→M6→M7→M8→M17→M18。由工艺路线可知,零件BXT和FGT的加工可以同时运行,而零件FXT的加工由于机器约束只能单独运行。以BXT类零件为例,数控加工时间如表1所示。

表1 BXT类零件加工工艺表 s
相同类型机器的装载、卸载操作(下文简称装卸操作)均可看作同类操作,即学习效应可累积。对18台机器的装卸操作按照机器类型可划分为5种技能(S1~S5),如表2所示。

表2 技能—机器对应信息
所有人员的工作时间为周一至周五8:00~12:00和13:00~17:00,所掌握技能的初始学习量均为0(对应初始工时消耗),各类型任务的初始中断时刻均为0时刻。据观测,人员的学习和遗忘系数均为0.9,最低工时消耗为初始工时消耗的50%。任务发布和指派顺序均采用先进先出策略,当任务申请冲突时采用优先指派给学习水平最高人员的机制,各类零件装卸和换线时间均服从正态分布,数控加工时间为恒定值。选择仿真建模软件Anylogic7.1.2构建生产系统混合模型,其中智能体的行为等二次开发采用Java语言进行编程。该生产系统仿真模型3D示意图如图4所示。

3.2 实验设计
在本案例中,波动水平通过换线次数来体现。
这是由于换线次数越多,所加工零件的调整次数越多,即生产系统所面临的环境波动越大。通过设置生产系统的换线次数,设计了5个波动水平的订单序列,且各波动水平下3类型号零件的总需求量均为320个。具体参数设置如表3所示。

表3 波动水平参数设置
如前所述,该生产系统有9名生产人员、5类操作技能,据此设计了代表低、中、高3种柔性水平的人员—技能配置方案。每种柔性水平的人员—技能配置情况及对应的f值如图5所示。为了分析不同的人员柔性水平在不同环境波动下对生产系统评价指标的影响,将3种人员柔性水平和5个环境波动水平进行组合,每种组合作为一个仿真实验,每个仿真实验运行20次。

3.3 结果和讨论
3.3.1 学习水平
由式(7)可知,团队学习水平反映了在相同的学习次数下,由于任务中断所造成的对生产效率的影响。经过仿真运行,3种人员柔性水平在5个波动水平下的团队学习水平对比如图6所示。

由图6可知:3种人员柔性水平下的团队学习水平均随着波动水平的提高而降低;人员柔性的提高会造成团队学习水平的降低;3种人员柔性下的学习水平之间的差距随着波动水平的提高而降低。
根据图6中数据计算3种人员柔性在所有环境下团队学习水平的标准差来衡量学习水平的稳定性,如图7所示,人员柔性的提高将提高团队学习水平的稳定性。由此可知,对于低人员柔性的团队,团队的学习水平会受到波动环境的强烈干扰。对于高人员柔性的团队,团队的学习水平更加稳定,不易受到较大的干扰。

3.3.2 生产周期
3种人员柔性水平在5个波动水平下生产周期对比如表4和图8所示。由图表可知,在波动水平Ⅰ-Ⅲ下,低人员柔性可得到最短的生产周期,在波动水平Ⅳ-Ⅴ下,高人员柔性可得到最短的生产周期。这意味着对于波动较小的生产环境,低柔性的团队表现优于高柔性的团队,而在波动剧烈的生产环境,高柔性的团队表现优于低柔性的团队。

表4 不同波动水平下生产周期对比 min

为分析出现上述结果的原因,对3种人员柔性水平在5个波动水平下装卸任务等待总时间进行对比,如图9所示。由图可知,在波动水平Ⅰ-Ⅱ下,人员柔性越低,任务等待总时间越短;在波动水平Ⅳ-Ⅴ下,人员柔性越高,任务等待总时间越短。
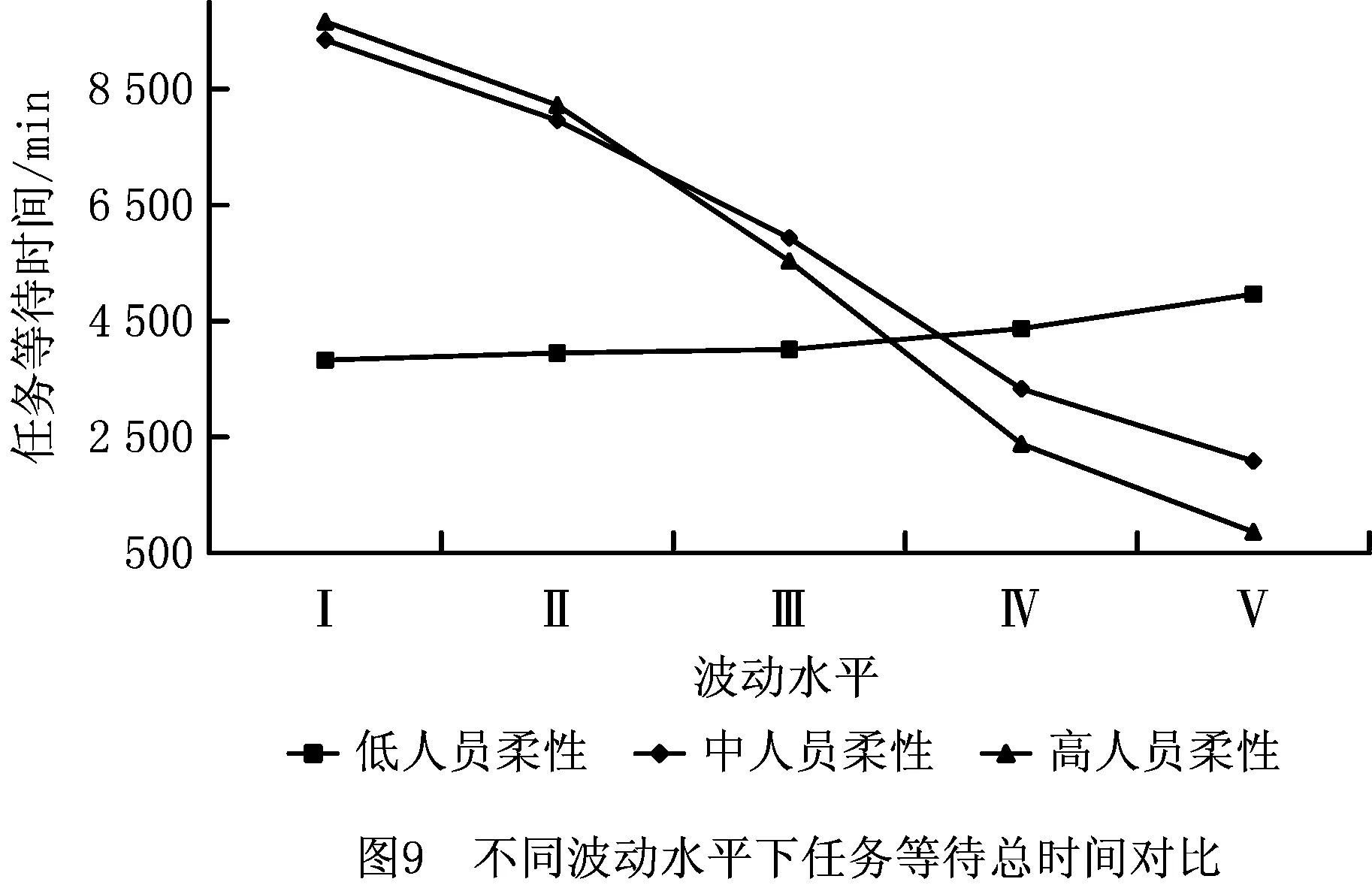
结合实验所得团队学习水平和任务等待总时间对比结果,可分析生产周期对比结果产生的原因为:当波动水平较低时,更低的人员柔性具备更高团队学习水平和更短的任务等待总时间。而随着波动水平的增高,与更高人员柔性相比,更低人员柔性一方面在团队学习水平上的优势逐渐缩小,另一方面产生的任务等待总时间逐渐由更短转变为更长。
3.3.3 系统柔性
从图8还可看出,虽然随着波动水平的增大,3种人员柔性下的生产周期均呈现增加的趋势,但增加的速度有所不同。对于低人员柔性的团队,当波动增大时,生产周期增加非常迅速,表现出不稳定性;对于高人员柔性的团队,当波动增大时,生产周期增加较为缓慢,表现出稳定性。通过计算系统柔性指标σT(即生产周期在所有波动水平下的标准差),得到的3种人员柔性水平下的σT均值对比如图10所示。


表5 假设检验结果
注:*表示p<0.05,**表示p<0.01。
3.3.4 管理建议
基于上述仿真结果和讨论,可对该生产系统提出如下管理建议:
(1)将生产者的学习—遗忘效应加入生产仿真模型后,更高人员柔性的生产团队一方面会导致学习中断的情况更为频繁,从而降低整个团队的学习水平,也会间接影响到生产的效率;另一方面可以提升团队学习水平的稳定性,不易受到较大的干扰。因此,管理者在考虑团队技能配置时,需要综合考虑人员柔性带来的组织灵活性和学习—遗忘效应。
(2)随着环境波动水平的增大,每种人员柔性水平的生产周期都会延长。当环境波动水平较低时,学习效应的影响占优,低人员柔性的团队完成订单的时间较短,因此这种情况生产系统应采用专业化分工的团队组织方式;当环境波动变得剧烈时,组织灵活性的影响占优,高人员柔性的团队表现渐渐优于低柔性团队,因此在这种情况下应尽量提高人员柔性。
(3)高人员柔性的团队能够更好地适应各种生产环境,即拥有最大的系统柔性。因此,从提升系统柔性的角度,则倾向于配置更高人员柔性的生产团队。
4 结束语
为了研究波动制造环境下人员柔性对生产系统的影响,本文进行了考虑学习—遗忘效应的人员柔性仿真研究。利用离散事件和智能体混合的建模方式建立了生产系统仿真模型,并将提出的仿真方法对某生产系统进行了案例研究。仿真结果表明:提升人员柔性水平会导致较低的团队学习水平但较高的学习水平稳定性;低人员柔性的团队和高人员柔性的团队分别在中低水平和高水平的环境波动下得到最短的生产周期;提高人员柔性水平可显著改善系统柔性。所进行的研究也反映出:离散事件和智能体混合建模的仿真方法既能体现生产过程中离散事件的动态特点,又能体现生产系统中人的自治、协作等微观行为,支持对生产系统的人员柔性和学习水平等组织管理的相关指标进行评价。后续研究将进一步丰富生产者智能体模型的行为机制,如合作、协商、失误等,从而探究更多智能体行为机制对生产系统的影响。
猜你喜欢
机械工业标准化与质量(2022年9期)2022-09-30
石油沥青(2021年5期)2021-12-02
文化创新比较研究(2020年7期)2021-01-13
今日农业(2019年12期)2019-08-13
中国外汇(2019年23期)2019-05-25
文学少年(原创儿童文学)(2019年1期)2019-05-23
中国化肥信息(2019年3期)2019-04-25
文苑(2018年23期)2018-12-14
文苑(2018年19期)2018-11-09
文苑(2018年17期)2018-11-09