具有控制时滞的切换模糊系统的输出反馈可靠控制
2020-02-18 10:12贾美玉蒋文鑫秦思情张言赟
沈阳大学学报(自然科学版) 2020年1期
张 乐, 贾美玉, 蒋文鑫, 秦思情, 张言赟
(沈阳大学 信息工程学院, 辽宁 沈阳 110044)
随着科技的发展,社会的进步,工业上及日常生活中需要控制的系统越来越复杂,他们不是由连续时间动态系统组成的,而是一个混杂系统,切换系统是其中重要的一类,同时包含连续时间动态系统和离散事件动态系统以及二者相互耦合作用的复杂系统[1]称作混杂系统.切换系统一般由一组有限(或无限)个子系统与描述子系统间切换方式的切换规则构成[2-4],它在实际生活中有很好的应用,如:汽车速度控制系统和电容电路系统[5-6]等,有助于推动混杂系统理论的发展.
1985年,Takagi等提出基于模型的模糊控制系统[7]成为分析非线性系统中流行和方便的工具.如今,基于T-S模糊模型作研究已经成为当今的热点,很多控制问题都可以归结为T-S模糊系统[8-9].子系统是模糊系统的切换系统,称作切换模糊系统,该系统将模糊切换系统的二级模糊规则优化为一级模糊规则,是对模糊切换系统的进一步优化.文献[9]针对一类聚类型切换模糊系统,该模糊模型的前件以聚类型模糊集合和隶属度函数形式表示,采用PDC控制器设计方法设计系统控制器,给出切换规则,通过多Lyapunov理论给出满足最小驻留时间及切换律下的离散切换模糊系统的指数稳定条件.文献[10]采用平均驻留时间法设计切换律,给出状态反馈控制器,控制所提出的带有时滞和参数不确定的非线性网络切换控制系统,证明在反馈控制访问率不低于稳定条件的子系统的切换策略可达到指数稳定.上述文献所设计控制器均为状态反馈控制器,状态反馈控制是近些年来研究的热点问题,目前对于状态反馈的研究,已经取得了许多成果[11-12].而实际中在物理上不是系统的所有状态都可以通过传感器测得的,因此状态反馈法的应用受限,需要研究输出反馈系统,设计输出反馈控制器,目前关于这类的少见报道.
外界环境变化、设备元器件的损坏都可能造成执行器发生故障,因此可靠控制在实际中有着广泛的应用,也取得了一些成果[13-14].文献[15]通过设计适合的状态反馈控制器,保证了不确定时滞广义系统的执行器在允许的失效范围内系统正则、无脉冲且稳定.但是它的执行器需要有特定的失效范围,才能达到预期目标.这些传统的可靠控制,需要在理想条件为失效执行器部分能够镇定原系统的情况下或者是对执行器失效范围限制,当执行器发生本文所关注的“严重失效”时,传统的可靠控制设计方案已不再可行[16].
本文针对具有控制时滞的切换模糊系统输出反馈可靠控制问题,关注当执行器发生“严重失效”时,使用切换技术和多Lyapunov函数方法构造输出反馈可靠控制器,并给出相应的使闭环系统一致渐近稳定的切换策略.利用LMI工具箱求解线性矩阵不等式,最后通过Simulink仿真,给出数值仿真结果,进而验证所提出方法的有效性.
1 问题描述
考虑由Nσ(t)条规则构成的具有控制时滞的切换模糊系统,即每切换子系统由时滞T-S模糊系统构成.

第r个时滞切换模糊系统的数学模型如下:
第r个时滞切换模糊系统的全局模型如下:
(3)
其中,

(4)

对于系统(4)可以得到第r个子模糊系统的全局模型如下:
(5)
输出反馈可靠控制器的形式如下:
那么式(5)的可靠输出反馈控制器的全局模型为


(8)



(9)

切换律

(10)






若式(11)成立,则存在

(12)
其中,G(t)≜[xT(t),xT(t-d1),xT(t-d2)]T.
取多Lyapunov函数:

(13)
Pr,Rr,Sr为满足式(8)的正定对称矩阵.
根据式(7)有
则式(15)可以改写为式(16),

(16)

(17)


(18)
因此,控制器(7)可保证系统(3)在切换律σ(x(t))=r下是渐近稳定的.
2 仿真结果
为了证明所提出控制方法的有效性,考虑带有时滞的切换模糊模型如下:
我们有,



取式中参数,
利用MATLAB可求得:
求解C11,C12,C21,C22具体步骤如下.
Step 2 通过MATLAB可以得到:
取初始条件x(0)=(-1,1),通过Simulink仿真,具有控制时滞的切换模糊系统通过切换律和输出反馈控制器控制的系统状态响应曲线和控制曲线分别如图1和图2所示.
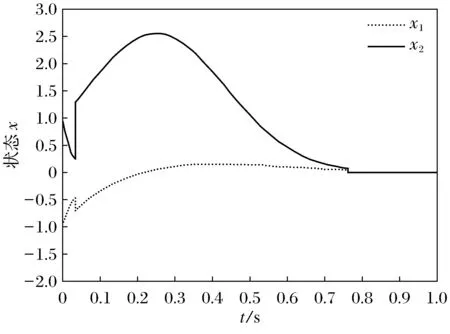
图1 根据定理1的系统的状态响应
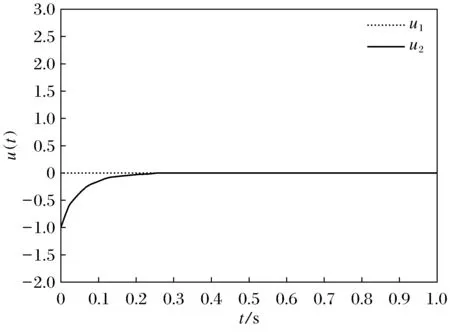
图2 根据定理1的系统的控制曲线
从仿真结果图1和图2容易看出,在初始条件x(0)=(-1,1)下,系统的状态响应曲线和控制曲线是渐近稳定的,综上所述,所提出的方法可以使得系统的性能更好且在执行器“严重失效”时,通过定理1给出的充分条件,使带有控制时滞的输出反馈可靠系统在设计的输出反馈可靠控制器下是一致渐近稳定的.
3 结 论
本文针对一类具有时滞的切换模糊输出反馈可靠系统,考虑了输出反馈可靠控制器的设计方法.为了确保闭环系统的稳定收敛性,基于多 Lyapunov函数方法求解出MATLAB中LMI可解的稳定性充分条件.最后通过Simulink仿真验证了当执行器发生“严重失效”时在所给出的充分条件及设计的输出反馈可靠控制器下,系统是一致渐近稳定的.
猜你喜欢
液压与气动(2022年10期)2022-11-27
电工技术学报(2022年20期)2022-10-29
汽车实用技术(2022年15期)2022-08-19
烟台大学学报(自然科学与工程版)(2021年1期)2021-03-19
北京航空航天大学学报(2020年10期)2020-11-14
汽车维修技师(2019年2期)2019-08-23
北方工业大学学报(2019年5期)2019-03-30
智富时代(2018年6期)2018-08-06
智富时代(2018年6期)2018-08-06
上海师范大学学报·自然科学版(2018年3期)2018-05-14