一种改进型逆变器控制策略的研究
2020-02-20 01:01王克柏郭明良于雁南
通信电源技术 2020年1期
王克柏,郭明良,于雁南,李 昊
(黑龙江科技大学 电气与控制工程学院,黑龙江 哈尔滨 150000)
0 引 言
逆变电路的应用十分广泛。在当前已有的电源中,蓄电池、干电池、超级电容以及太阳能电池等都是直流电源[1],不能直接向交流负载供电,需要先经过电能变换才可给交流负载供电,这就需要逆变电源。而判断一个逆变器的好坏,其控制方式尤为重要。
常用的逆变控制技术主要有模拟控制、数字PID控制、双环控制、无差拍控制和重复控制等[2]。模拟控制发展相对成熟,设计过程容易,但存在设计周期长、调试复杂、自我监控能力差等缺点[2]。数字PID控制是目前应用最广泛的一种控制方式,其控制算法相对简单,参数易于整定,系统适应力强,但存在时间滞后性,稳定性不高[2]。双环控制不要求开关频率,当开关频率低时,电流的动态响应慢,会影响系统的动态响应效果。无差拍控制具有较好的动、静态特性,但存在直流电压利用率低的问题[2]。以内膜原理为基础提出的重复控制,使系统可以具有良好的静态性能,消除周期性干扰产生的稳态误差,但由于存在延迟因子,在实际应用过程中无法单独使用。此外,以上控制方式均存在积分环节,实际误差信号与基准误差信号会产生一个相位差,当使用的控制方式属于单极性控制范畴时,换向点的占空比突变及实际误差信号和基准电压信号的相位差均会带来输出电压过零点振荡问题,严重影响输出电压质量。
文献[3]通过改变硬件电路,提出在切换点处使电流环在100 μs时间段内由积分环节变为比例环节,从而抑制过零点的振荡。但是,该方法对于控制频率较高的逆变器,内部闭环系统难以做到准确无误,且不能从根本上解决过零点振荡问题。因此,通过分析过零点振荡的原因提出解决措施,并提出了一种改进型逆变器控制策略,很好地解决了单极性控制时输出电压过零点振荡的问题。
1 主电路拓扑
单相全桥逆变主电路拓扑如图1所示[4]。图1中,Udc为逆变器输入直流母线电压,idc为逆变器输入电流[5]。VT1~VT4组成前后两个桥臂,为功率开关管;VD1~VD4为相应功率开关管VT1~VT4的寄生二极管。电感L和电容C组成输出滤波系统,其中r为滤波电感L等效内阻,经滤波系统后得到桥臂电压中的基波分量,其中RL为负载大小,io为输出电流。

图1 单相全桥逆变主电路拓扑
2 控制策略
2.1 控制策略介绍
传统逆变器的控制方式按调制波正弦信号在正半周期或者负半周期内极性的个数,分为单极性调制和双极性调制两种调制方式。若调制波正弦波在正半周期或者负半周期只有单一极性,所得的SPWM波形在半个周期中也只在单极性范围内变化,称为单极性SPWM控制方式。若载波三角波始终有正有负,所得SPWM波形在半个周期中有正有负,则称为双极性SPWM控制方式。双极性控制方式较单极性方式不存在过零点换向问题,输出电压过零点无振荡现象,谐波含量小。当这两种调制方式运用到非隔离型并网逆变器中时,存在于直流母线和大地之间的寄生电容由于开关管高频的开关动作引起寄生电容两端的共模电压发生改变,因此会产生共模漏电流,带来严重的电磁干扰。当采用双极性调制时,整个开关周期内寄生电容两端产生的共模电压均为母线电压的一半,因此几乎不产生共模漏电流。而单极性调制时,整个开关周期内寄生电容两端的共模电压在母线电压的一半和零之间发生改变,因此会产生共模漏电流,所以双极性调制方式较单极性调制电磁干扰小。但是,在整个开关周期内,双极性调制方式的开关损耗是单极性调制的2倍。在相同功率等级下,单极性调制方式较双极性调制效率高3~4个百分点。在中小功率等级下,这个数值可能更高。出于效率、功率密度及散热等方面的考虑,目前较常用的调制方式为单极性控制。由于单极性控制需要在过零点处换向,会使得输出电压在过零点处有振荡现象,故单相全桥逆变单极性SPWM控制方式过零点振荡的现象成为目前急需解决的问题。
2.2 过零点振荡分析
当单相全桥逆变电路采用单极性调制时,有两种产生SPWM脉冲的方式,分别为单极性单边SPWM控制方式和单极性双边SPWM控制方式。为分析方便,选择单极性单边SPWM控制分析过零点振荡产生的原因及抑制振荡的措施。这个分析结果也同样适用于单极性双边SPWM控制。
单边SPWM控制方式在过零点处的示意图如图2所示[5]。图2中,E1为理论上和基准电压波形同相位的误差信号。由于做负反馈的闭环设计时存在积分环节,根据负载的性质及轻重,实际的误差输出信号E2与基准电压信号之间会产生一个相位差。如图1所示,VT1和VT2组成高频臂,SPWM高频调制;VT3和VT4组成低频臂,按正弦信号正负半周变化。这种调制方式称为前快后慢控制方式。图2中,SPWM1是理论上高频臂VT1的驱动信号,SPWM2则是实际的VT1的驱动信号。
(1)在t0→t1时刻,由图2中的SPWM1可知,低频臂VT4驱动信号为1,相应VT3驱动信号为0,高频臂VT1驱动信号占空比逐渐减小;同理,互补脉冲VT2驱动信号占空比逐渐增大。
(2)在t1时刻,VT4的驱动信号由1变为0,相应VT3驱动信号由0变为1。在低频臂切换的同时[5],由E1产生的SPWM1在t1时刻由最小占空比的脉冲马上变为接近100%的SPWM,然后逐渐变小[5]。VT2和VT1为互补驱动,所以VT2的驱动信号在t1时刻由接近100%占空比的SPWM马上变为最小占空比SPWM,然后逐渐变大。

图2 单边SPWM控制在过零点附近的SPWM脉冲示意图
(3)在t1→t2时刻,实际的输出误差信号E2与E1相差一个相位,由图2中的SPWM2可以看出,t1时刻之后,SPWM2马上为0。由于高频臂下管VT2和VT1互补[5],VT2马上以一个较大占空比导通,然后慢慢变小,相应SPWM2占空比慢慢变大[5]。
由以上分析可知,无论是理论的误差信号E1还是实际误差信号E2,在低频臂换向的时刻均存在SPWM占空比突变的现象,而SPWM的突变必然引起输出正弦信号在过零点振荡。对于输出电压过零点的振荡,有以下3个解决方案:
(1)在低频臂换向时刻,把输出误差信号人为放电,使其为0[6];
(2)人为把低频臂信号超前或者滞后一定相位;
(3)改变调制方式,使换向时刻SPWM占空比不突变。
第一种解决方案只能减弱输出电压在过零点处的振荡,并不能从根本上解决振荡的问题。第二种解决方案由于低频臂信号的相位受负载轻重的影响,实际上难以做到准确无误。第三种解决方案为提出的一种新的控制策略,即提出半周期工频半周期高频调制。这种控制策略在过零点处无占空比突变现象,可以很好地解决过零点处的振荡问题。
2.3 半周期工频半周期高频调制方式
采用前快后慢的单极性调制方式存在两种占空比突变的形式。第一种是占空比由最窄突变到最宽,第二种是由最宽突变到最窄。新提出改进型逆变器控制策略的脉冲时序图,如图3所示。
对于第一种占空比突变的形式,使占空比由半周期的低电平变化到最窄占空比;对于第二种占空比突变的形式,使占空比由半周期的高电平变化到最宽占空比。这样能有效抑制占空比突变问题,具体如图4所示。

图3 半周期工频半周期高频控制方式脉冲时序图

图4 过零点处SPWM占空比变化对比
在每一个正弦周期内,每个开关管均有一半工作在工频状态,另一半工作在高频SPWM调制状态,仍然为单极性调制,既能保证效率又能很好地解决过零点处振荡问题[8]。改进型控制方式的工作时序分为正半周期和负半周期两种情况进行介绍,其中改进型调制方式开关周期如表1所示。
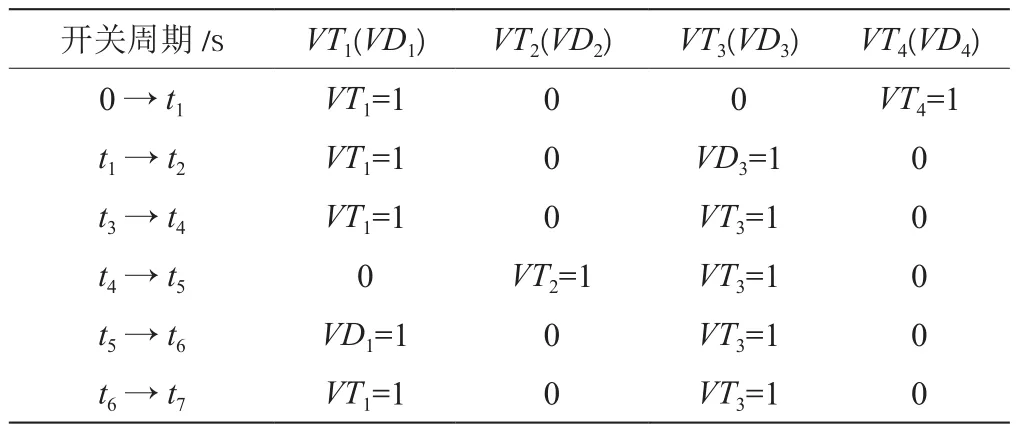
表1 改进型调制方式开关周期表
由表1可知,在正半周时期,VT1始终导通,VT2一直处于关闭状态,VT3和VT4高频SPWM调制,且VT3和VT4互补。一个周期内,具体工作过程可以分为3个阶段。为方便介绍,分为0→t1→t2→t3,瞬态分析如下。
0→t1阶段:VT1和VT4导通,VT2和VT3关断,逆变桥臂输出电压[7]+Udc;
t1→t2阶段:这个阶段为死区时间,只有VT1导通,其余开关管均关断,电感电流经过VD3续流,逆变桥臂输出电压为0。
t2→t3阶段:VT1和VT3导通,其余开关管均关断,电感电流经过VD3续流,逆变桥臂输出电压为0。
工作等效电路图和脉冲时序图如图5所示。
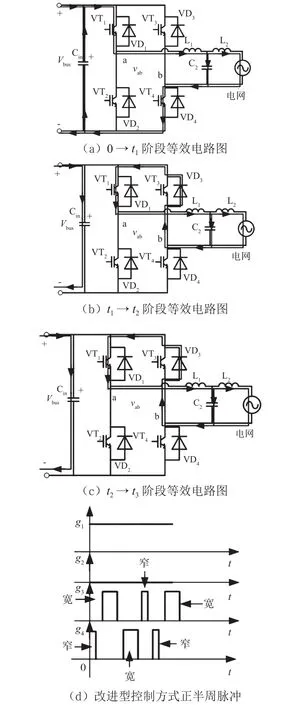
图5 改进型控制方式正半周等效电路图和脉冲时序图
在负半周时期,VT3始终导通,VT4一直处于关闭状态,VT1和VT2高频SPWM调制,且VT1和VT2互补。一个周期内,具体工作过程同样分为3个阶段。为方便介绍,分为t4→t5→t6→t7,瞬态分析如下:
t4→t5阶段:VT2和VT3导通,VT1和VT4关断,逆变桥臂输出电压[7]-Udc;
t5→t6阶段:这个阶段为死区时间,只有VT3导通,其余开关管均关断,电感电流经过VD1续流,逆变桥臂输出电压为0。
t6→t7阶段:VT1和VT3导通,其余开关管均关断,电感电流经过VD1续流,逆变桥臂输出电压为0。
工作等效电路图和脉冲时序图如图6所示。
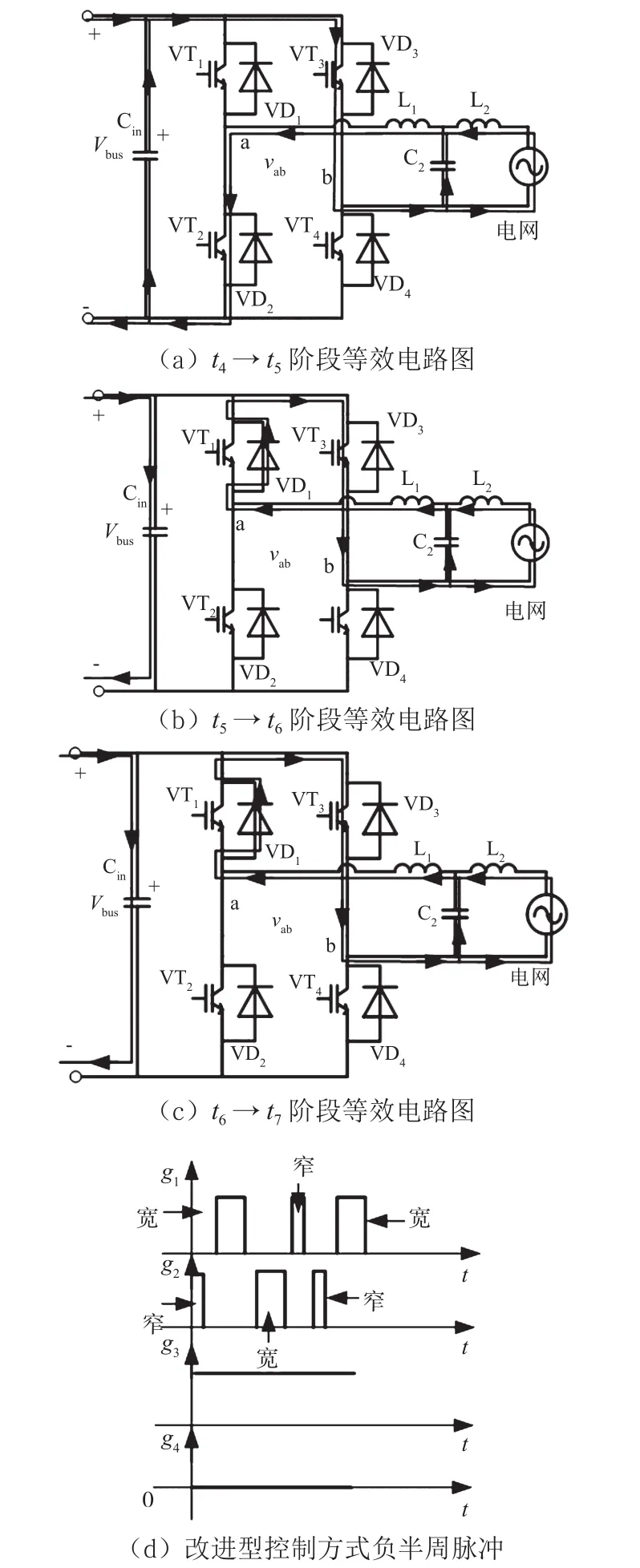
图6 改进型控制方式负半周等效电路图和脉冲时序图
可以取S作为开关变量:
(1)当VT1和VT4导通、VT2和VT3关断时,S=1;
(2)当VT1导通、VD3续流时,S=0;
(3)当VT2和VT3导通、VT1和VT4关断时,S=-1;
(4)当VT3导通、VD1续流时,S=0。
可以得到开关函数S的表达式为:

则逆变桥的输出电压可表示为:

3 仿真研究
为了更好地验证所提出改进型单相全桥逆变电源控制方式的可行性,通过Matlab平台搭建单相全桥逆变电源的仿真模型进行仿真研究,如图7所示。仿真参数设置如下:直流母线额定电压Udc=400 V,逆变器的输出电压u0=220 VAC,f=50 Hz,额定功率P0=2 kW,功率开关管选择均采用绝缘栅双极型晶体管[9](IGBT),开关频率为fs=20 kHz。
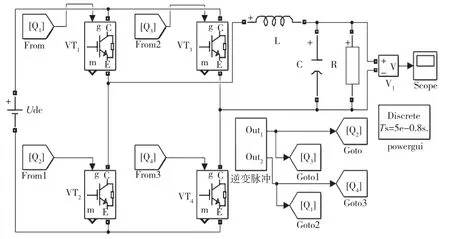
图7 单相全桥逆变电源仿真模型
按照以上电路搭建好模型后,设置仿真参数,得到如图8所示的逆变输出电压波形,并测出前快后慢与改进型控制策略的THD值,如图9所示。

图8 改进型控制方式仿真输出电压波形图
由图8可知,输出电压波形为50 Hz的正弦波幅值为311 V。由图9可知,改进型控制方式较前快后慢控制方式明显具有更小的THD值,说明输出电压过零点振荡现象得到有效抑制,验证了所提出改进型控制方式的可行性。
4 实验验证
为了测试所提出改进型逆变器控制策略的可行性,搭建基于H4结构逆变器的实验平台进行测试。4个开关器件均采用绝缘栅双极型晶体管,型号为I kW 75N60T。控制芯片采用DSP(TMS320F28035)控制,直流输入额定电Udc=380 V,开关频率fs=20 kHz,输出电压u0=220 VAC,滤波电感L=1.5 mH,C=4 μF,额定功率P0=2 kW,闭环控制。
按图1的脉冲时序图设置VT1~VT4的脉冲信号,具体脉冲信号如图10所示。
根据图10的脉冲信号,在额定负载2 kW功率等级下,给定直流母线输入电压Udc=380 V,得到前快后慢和改进型逆变器控制方式的输出电压波形,如图11所示。

图9 输出电压THD值

图10 改进型控制方式驱动脉冲波形
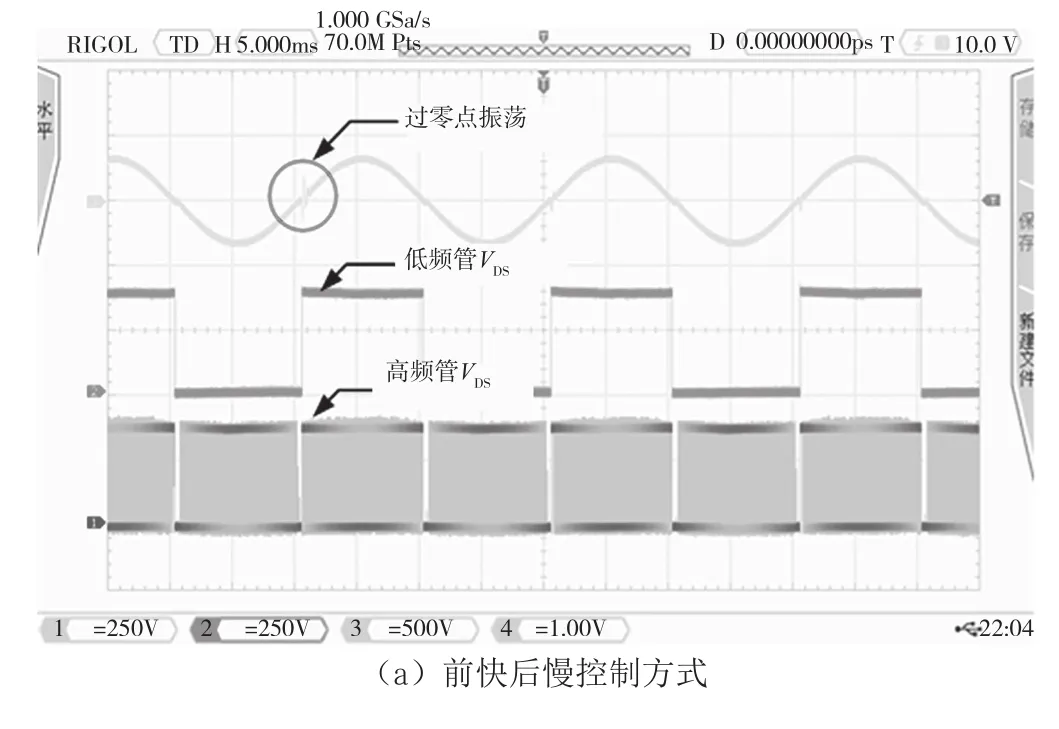

图11 输出电压波形图
由图11可知,提出的改进型逆变器控制策略可以实现DC/AC逆变过程,且较前快后慢单极性控制方式在换向处无占空比突变,因此输出电压在过零点无振荡现象,谐波含量少,THD值低,验证了所提的改进型逆变器控制策略的正确性,同时也与仿真结果一致。
5 结 论
双极性逆变器调制方式较单极性无换向过程,输出电压无过零点振荡,且电磁干扰较单极性小,但开关损耗大,因此效率偏低,需要增加散热。单极性逆变控制方式较双极性有更高的效率,但由于换向过程,输出电压过零点存在振荡现象。理论分析表明,换向处占空比突变造成过零点振荡。改进型逆变器控制策略在换向处无占空比突变,可以有效解决输出电压过零点振荡的问题,并通过仿真和实验证明了所提的改进型逆变器控制策略的有效性。
猜你喜欢
一重技术(2021年5期)2022-01-18
内蒙古电力技术(2021年5期)2021-11-21
莆田学院学报(2021年5期)2021-11-13
北京航空航天大学学报(2021年9期)2021-11-02
时代英语·高一(2019年5期)2019-09-03
速读·下旬(2019年3期)2019-04-11
电子制作(2017年20期)2017-04-26
电子制作(2017年23期)2017-02-02
轻兵器(2016年20期)2016-10-28
汽车电器(2014年2期)2014-12-02