
基于近距无线电导航的容错组合导航系统
2020-02-22 13:28朱敬生崔滢
科学导报·学术 2020年56期
朱敬生 崔滢

【摘 要】根据组合导航子系统的特点,提出了一种基于近距离无线电导航的容错组合导航方案。该方法具有较强的检测软故降的能力,并利用分量检测法提高了故障检测的灵敏度,在无重置联邦局部反馈校正的基础上,改进了算法的容错能力。
【关键词】近距;无线电导航;容錯组合导航系统
引言
导航系统作为飞行管理系统(FMS)的重要组成部分向FMS实时提供载体的位置、速度、姿态信息。单一的导航系统很难满足FMS对导航系统高精度、高可靠性、实时更新的要求。惯性导航系统(INS)作为一种完全自主的导航系统能够实时连续地提供全姿态导航信息,并且具有隐蔽性好,抗干扰,参数更新快等优点,但是其误差是随时间积累的,对于长航时高精度的飞行器来说,这是无法克服的弱点。全球卫星导航系统(GPS)具有全局性、天气友好性、高精度、三维定位等优点,但其在动态环境下的可靠性较差,容易受到地形目标和地物的遮挡,数据采集频率较低,是一个非自主系统。近距无线电导航系统可用于军用和民用机场。无线电导航系统具有导航时间短、设备简单可靠、导航误差不随时间积累、导航精度低等优点,基于此,本文提出一种INS/GPS/无线电容错组合导航系统,以求在子导航系统均正常工作的情况下,导航系统能够提供高精度的导航参数输出,在高动态或GPS出现不可用的情况下,系统能够提供连续实时的不随时间发散的导航解。
1组合导航子系统
INS子系统/GPS和INS/无线电子系统通过联邦滤波器提供导航参数的最优估计。
1.1 INS/GPS组合子系统
组合导航系统将INS系统误差记录为一个状态,东北天空坐标系为局部坐标系。SA误差(随机速度抖动和传输到星历数据的随机误差)在美国已经消除,在组合导航系统中,可以把GPS的三维定位误差和速度误差看作白噪声,INS-GPS组合导航系统的测量方程是基于GPS定位和速度测量的差分,并结合位置解和速度解。系统的测量如下:
其中,量测Zcps为惯导与GPS输出载体的速度和位置差,VuGps为GPS的速度地测噪声,Pwcrs为GPS的位量f测噪声,则INS/GPS组合导航系统的状态空间模型如下:
其中,为系统的误差状态;
为东向、北向和天向速度误差;
为纬度、经度和高度误差;
为俯仰、横滚和航向角误差;
εb=(εx,εy,εx)为东向、北向和天向陀螺的常值漂移;
为东向、北向和天向加速度计的常值零偏。
采用位置组合时:
1.2 INS/无线电组合子系统
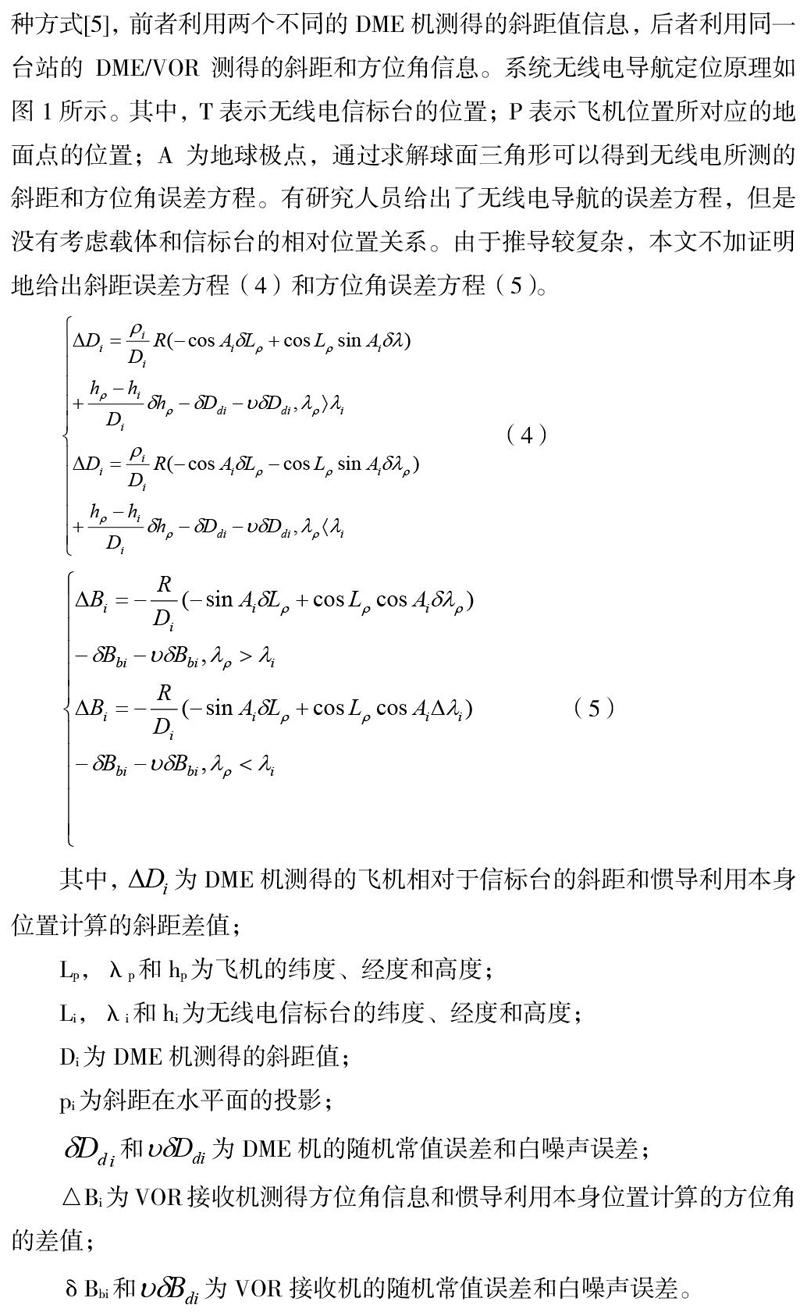
近距无线电导航定位系统可分为(ρ一p)定位和(ρ一θ)定位两种方式[5],前者利用两个不同的DME机测得的斜距值信息,后者利用同一台站的DME/VOR测得的斜距和方位角信息。系统无线电导航定位原理如图1所示。其中,T表示无线电信标台的位置;P表示飞机位置所对应的地面点的位置;A为地球极点,通过求解球面三角形可以得到无线电所测的斜距和方位角误差方程。有研究人员给出了无线电导航的误差方程,但是没有考虑载体和信标台的相对位置关系。由于推导较复杂,本文不加证明地给出斜距误差方程(4)和方位角误差方程(5)。
其中,为DME机测得的飞机相对于信标台的斜距和惯导利用本身位置计算的斜距差值;
Lp,λp和hp为飞机的纬度、经度和高度;
Li,λi和hi为无线电信标台的纬度、经度和高度;
Di为DME机测得的斜距值;
pi为斜距在水平面的投影;
和为DME机的随机常值误差和白噪声误差;
△Bi为VOR接收机测得方位角信息和惯导利用本身位置计算的方位角的差值;
δBbi和为VOR接收机的随机常值误差和白噪声误差。
2容错组合导航系统
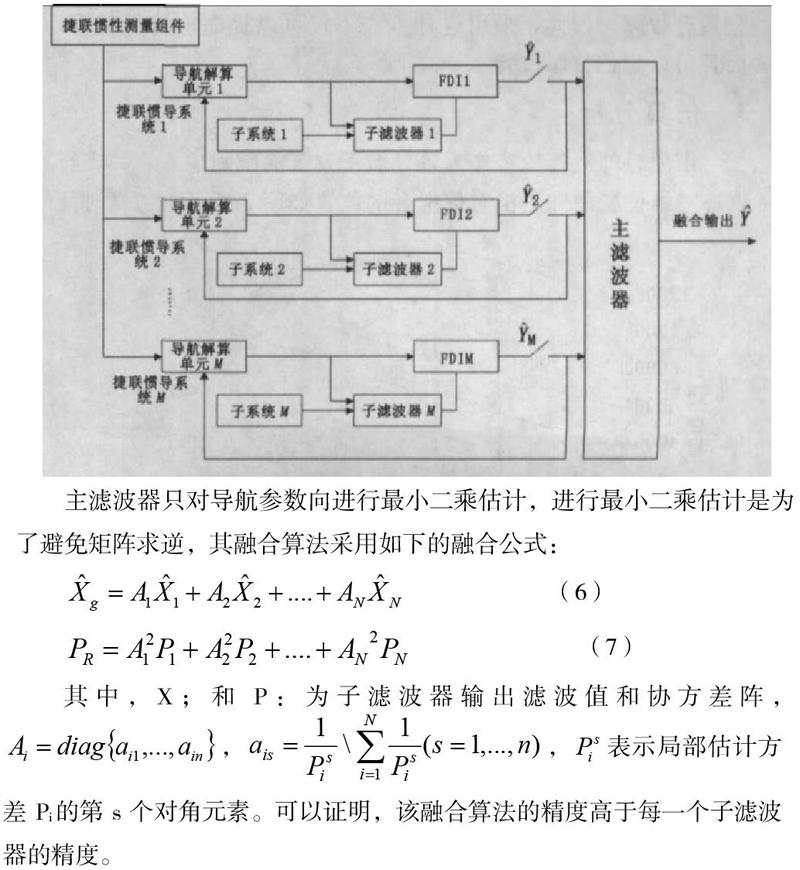
有文献提出了6种结构的联邦滤波器,指出无复位的联邦滤波器具有良好的容错性,并且这种结构不允许子滤波器的导航误差校正。为了保证子系统状态方程的精确性,有必要对惯导系统进行反馈,但是,为了保证系统的容错性能,没有必要用主滤波器输出的总体估计值来重置子滤波器,使惯导系统不接收反馈校正。到。为了保证系统的容错性能,避免了全局评估重设和反馈校正子滤波器的导航误差,本文提出了一种基于局部反馈的非重设联邦滤波器。它给出了一个带下惯性计(SINS)和一千个导航单元的fed滤波器,使SINS成为常用的参考系统。各导航子系统的输出和相应的导航解的输出构成子系统滤波器的测量;每个子滤波器的卡尔曼滤波运算独立地并行运行,并且每个子滤波器都采用反馈校正方式对各自导航解算单元的误差进行修正。各个分离的经过反馈校正的导航解算单元输出的导航参数是局部最优的。将这些局部最优的导航参数输人到主滤波器中,通过主滤波器的信息融合算法得到导航参数的全局估计,其结构如图1所示。
主滤波器只对导航参数向进行最小二乘估计,进行最小二乘估计是为了避免矩阵求逆,其融合算法采用如下的融合公式:
3结论
INS/GPS/无线电容错组合导航系统能够发挥各自导航系统的优点,采用局部反馈校正的无重置联邦滤波器的系统融合最优加权算法,在减少计算量的同时确保融合精度高于任一子系统。
参考文献:
[1]任旭阳.SINS/GPS/OD容错组合导航系统研究[D].湖北:华中科技大学,2019.
[2]杨春.组合导航系统的故障检测与容错技术研究[D].江苏:南京理工大学,2017.
[3]朱倚娴.AUV组合导航系统容错关键技术研究[D].江苏:东南大学,2018.
[4]丁宏升,刘峰.基于联邦滤波的容错组合导航系统仿真分析[J].航空计算技术,2013,43(5):132-134.
(作者单位:中航飞机汉中飞机分公司)
