
拖拉机液压机械式变速器小波神经网络PID控制
2020-02-24 07:31滑杨莹唐希雯汪韶杰
合肥工业大学学报(自然科学版) 2020年1期
滑杨莹, 夏 光, 唐希雯, 汪韶杰
(1.合肥工业大学 汽车工程技术研究院,安徽 合肥 230009; 2.合肥工业大学 汽车与交通工程学院,安徽 合肥 230009; 3.国防科技大学 电子对抗学院,安徽 合肥 230037)
我国正处于由传统农业向现代化农业转型升级的重要时期,拖拉机作为主要的农业机械在国民经济中起着非常重要的作用[1]。液压机械式变速器(hydraulic-mechanical transmission, HMT)采用液压功率流与机械功率流组合双流传递动力,综合了液压和机械传动的优点,提高了作业效率以及燃料经济性,具有良好的应用前景[2]。国外对HMT研究较为深入,并且普遍在大、中型拖拉机上安装了HMT[3]。例如德国专业生产变速器的ZF公司[4]的S-Matic系列、ZF Eccom系列能够实现正、反向连续4段无级传动,通过控制变速器主要在液压功率分流比小于10%的范围内工作,显著提高了传动效率,但是公开的研究资料较少。我国对于HMT的研究仍处于起步阶段,文献[5-6]对HMT换段品质优化进行了研究,文献[7]根据基本换挡规律和拖拉机滑移率对HMT换挡策略进行了研究,对HMT的研究主要侧重于结构设计、理论计算、换段品质等方面,而对HMT的速比控制研究较少。由于拖拉机的作业特性,当拖拉机挂接农机具进行作业时,车速要始终维持不变,不同种类作业有不同的作业车速要求。
PID控制在工业生产中应用十分广泛,然而,文献研究表示,PID 控制中存在控制器参数整定问题,控制过程中采用人工整定或者常规整定方法,费时费力,而且难以得到理想的PID参数[8]。相比于常规的PID控制器,神经网络PID控制利用神经网络强大的纠错能力和自学习能力,与PID控制相结合,能自动整定控制器参数,有效提高系统的控制性能。小波神经网络PID在工业控制中有一定的应用,如文献[9-11]分别采用小波神经网络PID对转台伺服系统、压电陶瓷以及无极变速器进行了伺服控制、前馈控制、变速控制。目前,小波神经网络PID并未在HMT速比控制中得到应用。
针对拖拉机作业工况对车速的要求,本文结合小波神经网络和PID控制的优点设计了小波神经网络PID控制模型,并在HMT拖拉机的动力学模型上进行仿真,为液压机械变速器的硬件在环试验奠定基础。
1 小波神经网络PID控制器
HMT拖拉机的小波神经网络PID变速控制系统如图1所示。
图1中,vopt为期望车速;v为HMT拖拉机实际车速;e为期望车速与实际车速的误差;u为PID控制器的输出;KP、KI、KD分别为PID控制器的比例、积分、微分系数[12];WNN表示小波神经网络控制器。
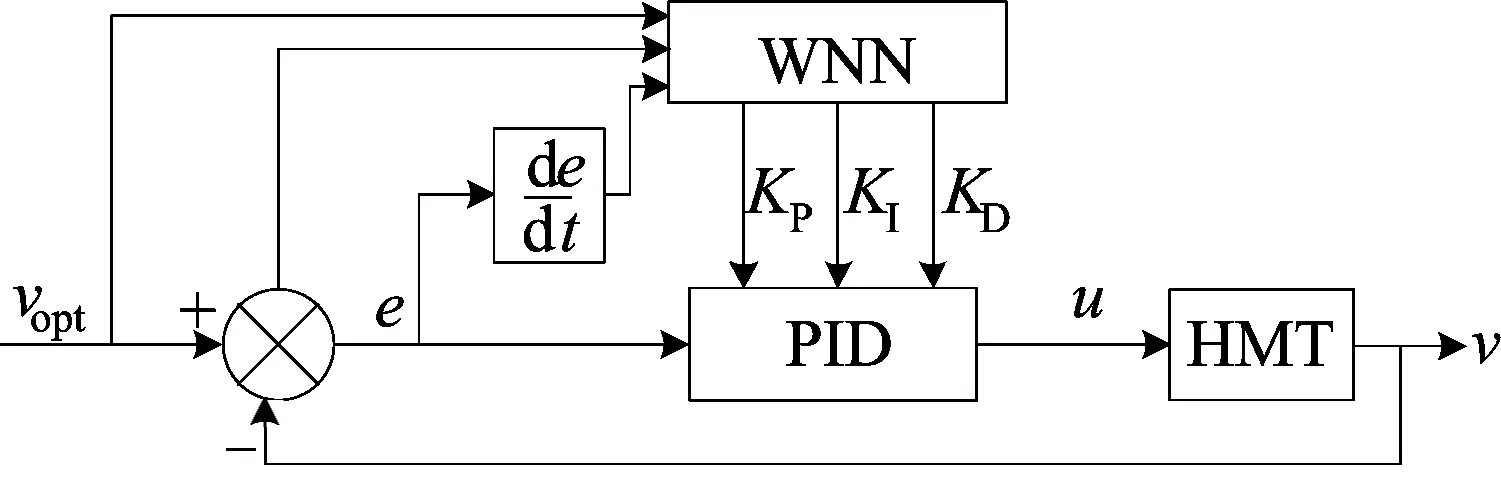
图1 HMT拖拉机变速控制系统
1.1 PID控制器设计
基本PID控制算法分为位置式PID和增量式PID 2种。位置式PID控制的输出与整个过去的状态有关,用到了误差的累加值,计算机运算工作量很大,且累积误差相对更大。而增量式PID控制器输出的是控制量增量,并无积分作用,误动作小,易于实现手动/自动的无扰动切换,不产生积分失控。因此,本文采用增量式PID控制器,控制误差为期望车速与实际车速的差,即
e(t)=vopt(t)-v(t)
(1)
PID控制器输入为:
c=[c(1)c(2)c(3)]T
(2)
其中
c(1)=e(t)-e(t-1)
(3)
c(2)=e(t)
(4)
c(3)=e(t)-2e(t-1)+e(t-2)
(5)
PID控制器输出为:
u(t)=u(t-1)+KP[e(t)-e(t-1)]+
KIe(t)+KD[e(t)-2e(t-1)+e(t-2)]
(6)
其中,e(t)、e(t-1)、e(t-2)分别为t、t-1、t-2时刻的系统偏差量;u(t)、u(t-1)分别为t、t-1时刻的PID控制器输出量。
1.2 小波神经网络设计
小波神经网络控制器选取3-5-3结构,PID控制器的比例、积分、微分系数由小波神经网络在线调整,小波神经网络如图2所示。

图2 小波神经网络结构

φ(x)=cos(1.75x)exp(-t2/2)
(7)
输入层的输入为:

(8)
其中,上标I代表输入层。
隐含层的输入为:
(9)
隐含层的输出为:
(10)
其中,上标H代表隐含层。
输出层的激励函数采用Sigmoid函数,即
(11)
输出层的输入为:
(12)
输出层的输出为:
(13)

小波神经网络的性能指标选取为:
(14)
小波神经网络通过不断修正权值wIH、wHO以及伸缩因子a、平移因子b,使误差E逐渐减小,即使得HMT拖拉机逐渐逼近期望车速。wIH、wHO和a、b的修正规则[14]如下所述。其中,η为给定学习率,λ为动量因子。
隐含层到输出层权值wHO修正为:
(15)
(16)
其中
输入层到隐含层的权值wIH修正为:
(17)
(18)
伸缩因子a修正为:
Δaj(t)=λΔaj(t-1)+ηδaj
(19)
(20)
平移因子b修正为:
Δbj(t)=λΔbj(t-1)+ηδbj
(21)
(22)
1.3 小波神经网络PID变速控制步骤
(1) 确定小波网络结构参数,选定学习率和动量因子,此时令t=1。
(2) 采样计算系统偏差和偏差变化量。
(3) 根据公式求出各层神经元输入值和输出值,输出层的输出即PID控制器的参数。
(4) 计算PID控制器的输出。
(5) 在线调整输入层、隐含层的权值系数,使PID控制器参数根据系统状态不断调节。
(6)t=t+1,重复步骤(2)~步骤(5)的计算,直至t大于仿真时长。
2 拖拉机动力学模型
HMT拖拉机动力系统包括发动机、HMT、中央传动机构、行走和负载机构、轮胎。由于不考虑拖拉机转向问题,简化中央传动机构、行走和负载机构,重点建立发动机、HMT、轮胎模型。
2.1 发动机模型
发动机模型可以表示为Te=f(α,ne),Te为发动机输出扭矩,ne为发动机转速,α为油门开度。其中,ne、α为模型输入量;Te为模型输出量。发动机模型可以根据发动机稳态转矩实验数据用数值拟合方法获取。
根据发动机稳态转矩实验数据,拟合在不同油门开度下的发动机转矩特性如图3所示。
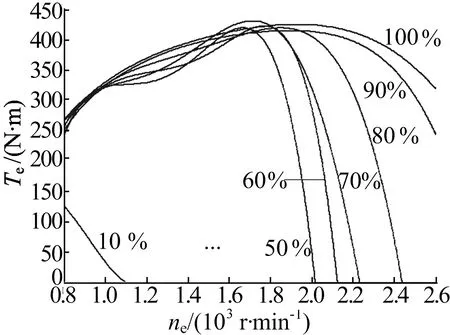
图3 不同油门开度下的发动机转矩特性
2.2 HMT变速器模型
HMT变速器结构如图4所示,其中,数字1~35代表齿轮编号,字母A~G代表轴,L代表离合器,P代表泵和马达。此HMT为前端液压汇流,可通过离合器L2、L3的接合或分离实现纯机械传动、纯静压传动和混流传动3种状态的切换和无级变速。
纯液压传动时,L2分离,L3结合,汇流行星轮系不产生减速作用,在液压马达P3的作用下,整体旋转将动力输出,液压马达P3的转速受变排量泵P2的控制。机械液压混流传动时,L2结合,L3分离,机械运动通过齿轮传递给汇流行星轮系的行星架,柱塞泵P2与柱塞马达P3构成的液压传动通过齿轮传递给太阳轮,汇流后通过齿圈输出。纯机械传动时,柱塞马达P3锁死,汇流行星轮系的太阳轮为制动状态,L2结合,L3分离,汇流行星轮系行星架输入,齿圈输出,液压机构不传递动力。
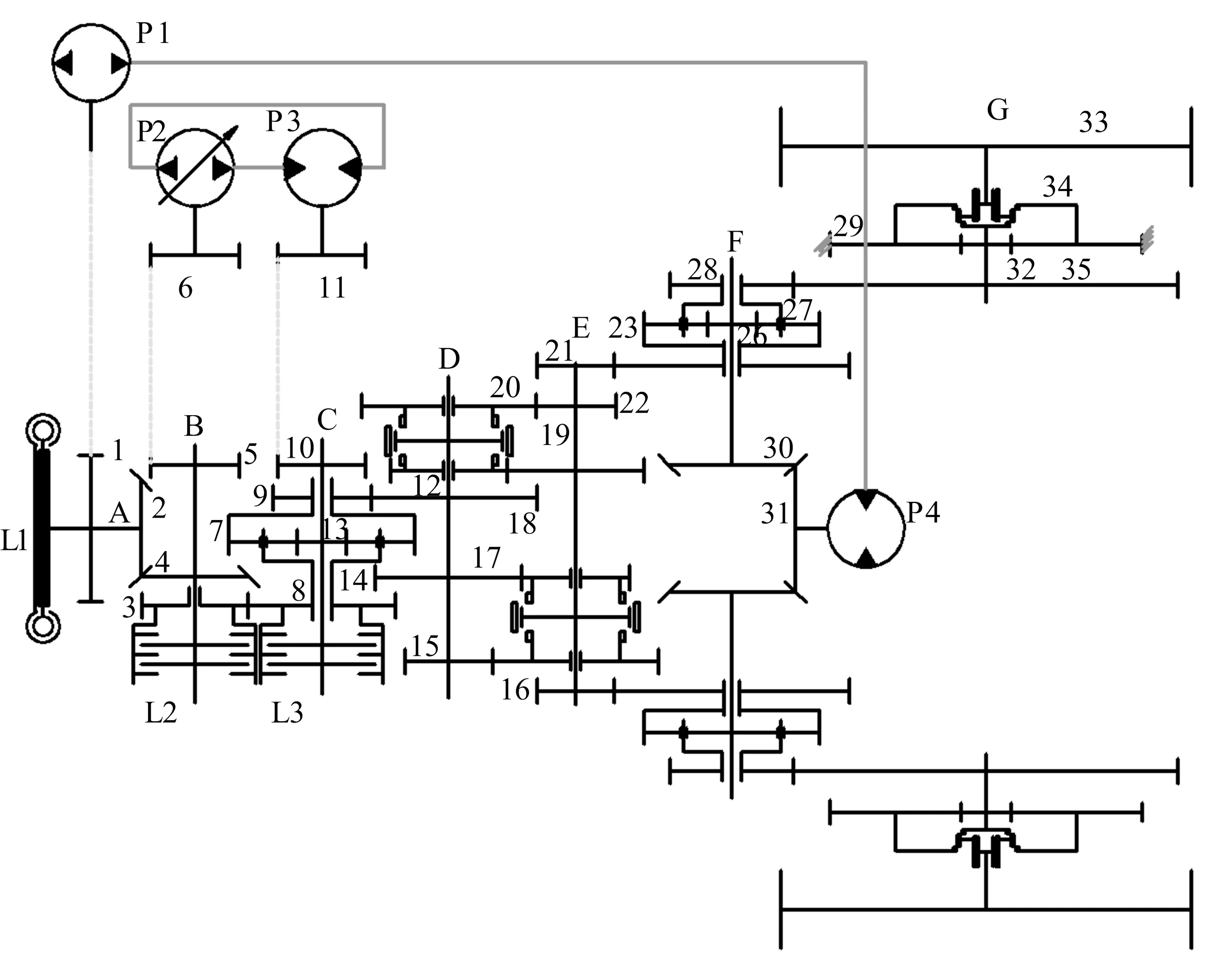
图4 HMT变速器结构
2.2.1 轴系动力学模型
HMT根据换段规则,相应离合器结合在每种传动方式下离合器的接合状态不同,以离合器L2接合、L3分离进行机械液压双流传动为例建立部分轴系数学模型,即
(23)
2.2.2 离合器模型
HMT采用湿式离合器,当主、从动盘之间存在相对滑转时,离合器传递扭矩的求解公式为:
TL=kLχL(Δω)psgn(Δω)
(24)
其中,kL为离合器特性参数,由离合器摩擦片的数目、面积和压力半径决定;p为油压;Δω为主从动盘转速差;χL(Δω)为随滑移速度变化的摩擦系数。
2.2.3 变量泵定量马达系统模型
本文HMT采用变量泵-定量马达系统,为便于建模,忽略油温和油压变化导致的油液黏度和密度变化,利用2个传递函数描述泵-马达系统[15]。马达输出轴转速对变量泵摆角的传递函数为:
(25)
其中,Kqp为变量泵的流量增益;Dm为马达排量;f为液压固有频率;ξ为液压阻尼比。马达输出轴转速对外负载力矩的传递函数为:
(26)
其中,C为油液泄露系数;βe为油液弹性模量;V为泵和马达的工作腔总容积。
2.3 轮胎纵向动力学模型
对整车列方程有:
(27)
其中,m为拖拉机工作质量;v为车速;Ft为工作阻力;Ff为轮胎滚动阻力;Fd为拖拉机驱动力,其表达式为:
Fd=0.75G[1-exp(-Cnλ)];
其中,G为拖拉机重力;Cn为轮胎的负荷系数;s为轮胎滑转率,λ=1-v/(ωrr),ωr为轮胎转速,r为轮胎半径。对驱动轮列方程有:
(28)
其中,Jr为所有传动部件换算到驱动轴的转动惯量;Td为轮胎驱动力矩;Tzu为驱动轮滚动阻力矩。
3 仿真与结果分析
在Matlab/Simulink中搭建仿真模型,如图5所示。
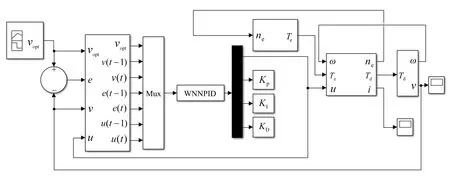
图5 HMT拖拉机变速控制仿真模型
拖拉机发动机节气门开度为80%,作业阻力围绕15 kN上下波动,如图6所示。仿真时间为 10 s,拖拉机目标车速在第5秒时由3.6 km/h阶跃变化到10.8 km/h,小波神经网络 PID 控制与常规 PID 控制对车速控制仿真结果如图7所示。
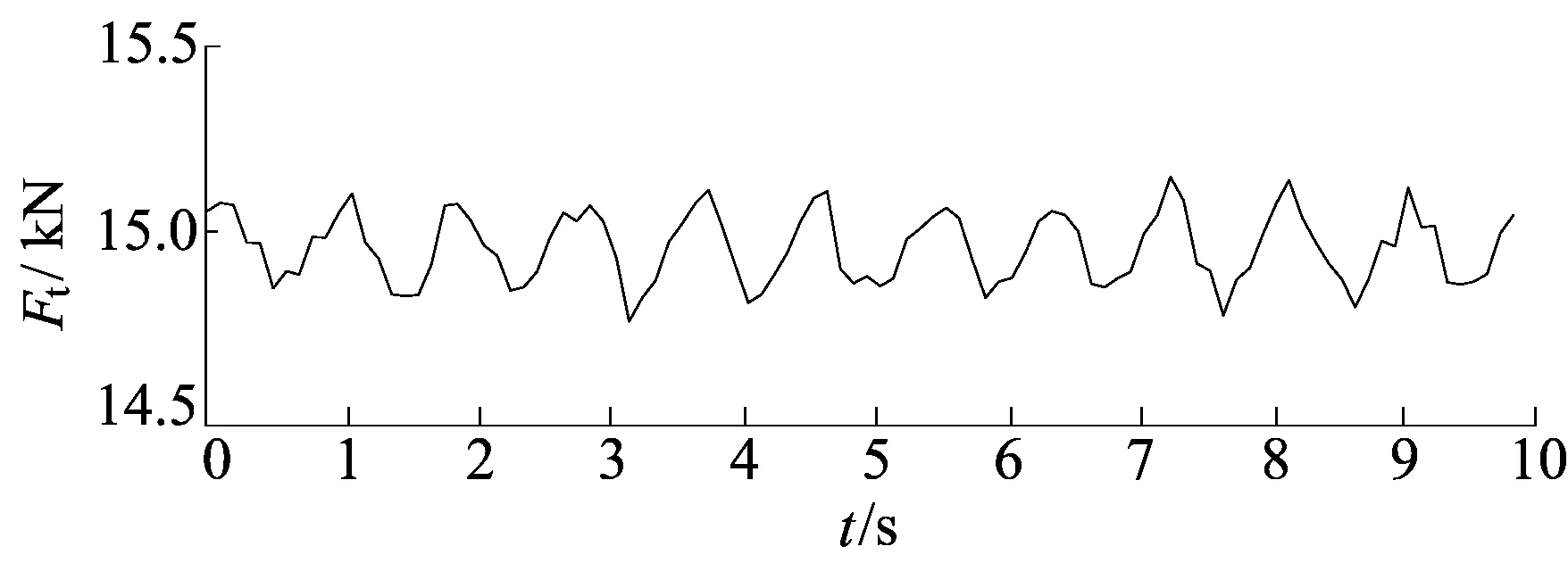
图6 拖拉机作业阻力
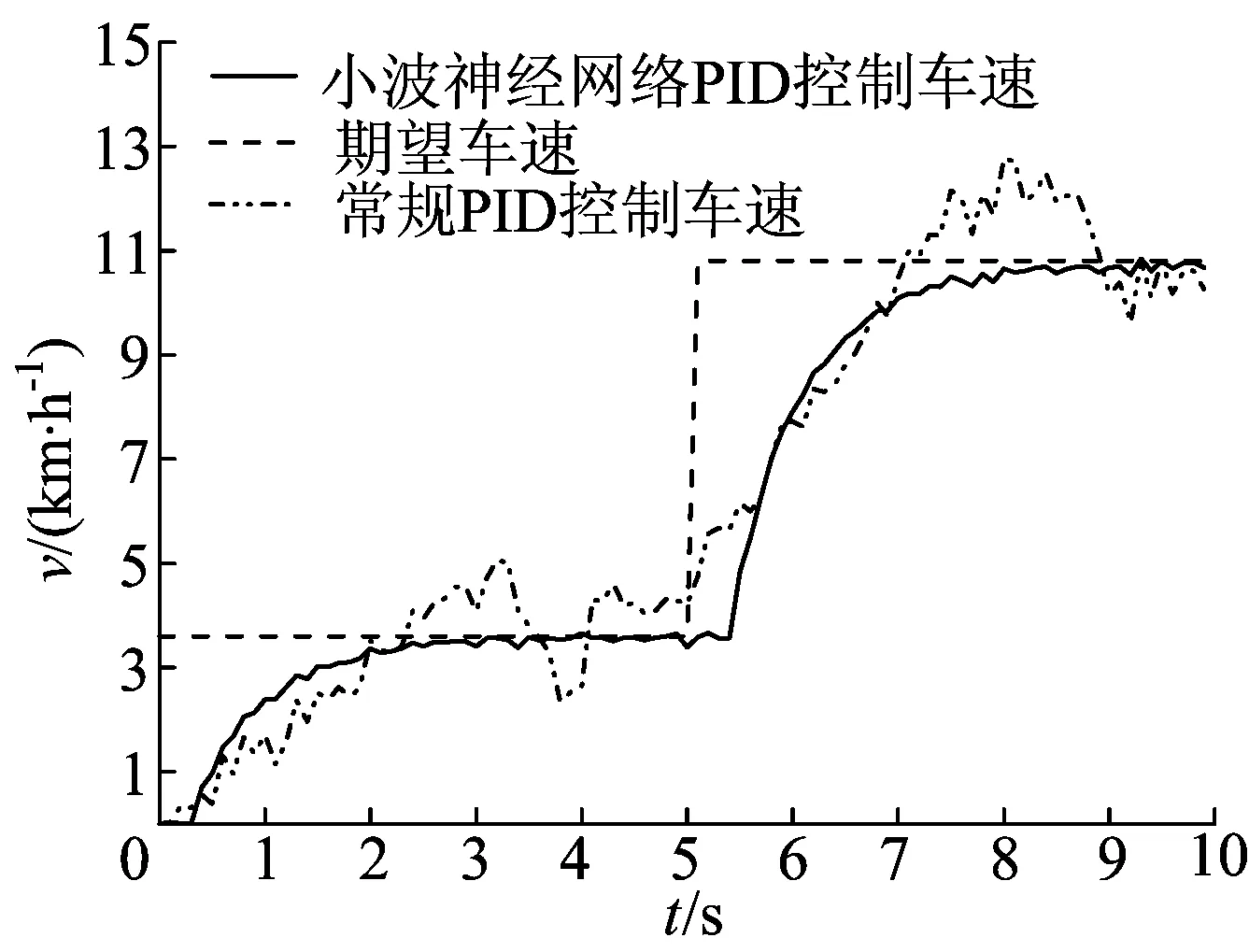
图7 车速控制结果
HMT拖拉机速比调节通过调节泵-马达系统的排量比实现,排量比变化如图8所示,控制系统误差如图9所示。

图8 变速控制排量比

图9控制系统误差
由图7~图9可以看出,采用小波神经网络 PID 控制可以使车速在作业阻力波动的情况下保持稳定,当目标车速在5 s处阶跃变化时,也可以快速追踪目标车速并保持稳定,排量比也快速变化,车速、排量比超调量为0,系统控制误差可以迅速减小并逼近0,作业阻力波动时也可以保持平稳,响应速度快。而常规PID由于无法实时调整PID参数,当目标车速出现阶跃变化时,无法使车速快速达到目标车速并保持稳定,排量比也在不断波动,系统出现超调,控制系统误差较大。因此小波神经网络 PID 控制具有更好的适应性、稳定性和更高的控制精度。
4 结 论
本文通过建立发动机模型、HMT模型、轮胎纵向动力学模型以及小波神经网络PID变速控制模型,实现了对装备HMT的拖拉机的车速控制。通过对比小波神经网络PID控制和常规PID控制,证明了小波神经网络PID控制具有更好的适应性、稳定性和更高的控制精度,为拖拉机HMT硬件在环试验奠定了一定的基础。
猜你喜欢
物流技术与应用(2022年8期)2022-08-26
汽车实用技术(2022年14期)2022-07-30
作文周刊·小学三年级版(2020年24期)2020-07-17
物流技术与应用(2020年4期)2020-05-06
汽车维修技师(2017年9期)2017-02-04
棋艺(2016年4期)2016-09-20
汽车实用技术(2015年8期)2015-12-26
汽车维修与保养(2015年12期)2015-04-18
汽车维修与保养(2015年2期)2015-04-17
客车技术与研究(2014年5期)2014-02-28
