车辆自适应巡航控制策略及算法对比分析
2020-03-02 11:53苗育西唐君平
时代汽车 2020年20期
苗育西 唐君平

摘 要:本文研究了自适应巡航控制策略及算法,重点分析了巡航控制中模糊控制和PID算法的跟车巡航及定速巡航模式,研究了安全距离的固定距离模式及可变距离模式,最后对所研究的控制策略及算法基于MATLAB/Simulink与CarSim软件联合仿真进行验证,仿真结果表明所研究的控制策略及算法表现良好,符合实际情况,满足设计要求。
关键詞:自适应巡航 控制策略 控制算法 仿真
Comparative Analysis of Vehicle Adaptive Cruise Control Strategy and Algorithm
Miao Yuxi Tang Junping
Abstract:This paper studies the adaptive cruise control strategy and algorithm, focusing on the following cruise and constant speed cruise modes of fuzzy control and PID algorithm in cruise control, and studies the safe distance fixed distance mode and variable distance mode, and finally the control strategy and algorithm studied are verified based on the joint simulation of MATLAB/Simulink and CarSim software. The simulation results show that the control strategy and algorithm studied perform well, conform to the actual situation and meet the design requirements.
Key words:adaptive cruise, control strategy, control algorithm, simulation
1 引言
汽车自适应巡航控制系统(Adaptive Cruise Control system, ACC)是车辆主动执行加速或减速请求,稳定跟车行驶[1]。ACC分为定速巡航、跟车巡航两种模式[2-4]。
2 控制策略及算法
2.1 自适应巡航控制策略
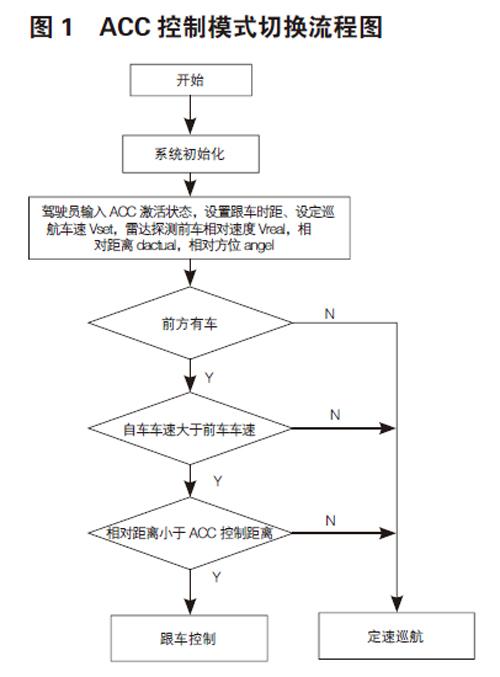
本文控制策略分为定速巡航、自适应巡航,状态切换依据驾驶员开关输入,自车与前车状态信息等[5]。具体工作流程如图1所示。
2.2 安全距离控制算法
安全距离控制算法分固定安全距离和可变安全距离,可变安全距离分为固定车间时距CTH(Constant Time Headway)与可变跟车时距VTH(Variable Time Headway)[6]。
1)固定车间时距为:
为两车安全间距,为自车车速,为设置的车间时距,为自车跟停的最小安全间距。
2)可变车间时距是变化的[7],由自车车速和行驶坏境决定,为:
,为大于0的常数,得到车间时距跟车速相关,车速要求低于最高车速,即满足式:
根据实际情况,本文采用可变安全距离[7]算法,得到车间时距:
,,均为大于0的常数,为最大值不超过3s,为自车与前车的相对速度,为:
为前车车速,得到实际距离和安全距离一致,符合实际情况。
2.3 距离控制算法
2.3.1 模糊控制器设计
采用模糊控制算法设计距离控制器,如图2所示。
2.3.2 控制输入输出变化论域
模糊化过程是指将输入值的数值转化为模糊语言的过程,需定义基本论域,选择合适语言变量和隶属函数,完成模糊化[8]。
设计控制控制模糊论域为,同时距离差值、距离差值变化率、加速度差值、制动压力基本论域为、、、,量化因子分别为:
模糊语言转化为数值的比例因子为:
2.3.3 隶属函数选取及设计
设计模糊规则如表1:
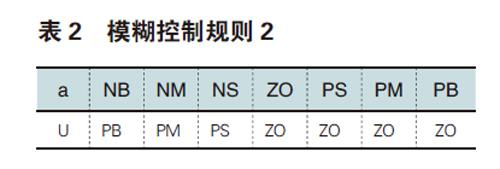
为避免自车加速过程中产生制动力,设计模糊规则如表2。
2.4 速度控制算法
本文速度控制采用PID控制算法,如图3所示。
3 仿真验证
3.1 CarSim与Simulink联合仿真
本文基于CarSim和Simulink联合仿真验证控制策略及算法。
3.2 典型工况验证
3.2.1 安全距离
为验证安全距离控制算法,设计工况:自车与前车达到跟车稳态,改变稳态时车速,结果如图4所示。
图4可知,VHT与CHT安全距离表现一致,可变车间时距与实际相符,满足设计要求。
3.2.2 定速巡航
设计条件:自车车速为95km/h,前车车速为100km/h,前车与自车纵向距离为200m,结果如下。
从图5、6知:当前车高速行驶且不在自车距离控制范围内时,自车定速巡航,满足设计要求。
3.2.3 跟车巡航
设计条件:自车以95km/h车速定速巡航,前车以80km/h与自车纵向距离70m匀速行驶,仿真结果如下。
从图7、8知:跟车时距满足设计要求。
4 结论
研究将模糊控制算法、PID控制算法应用于自适应巡航控制设计中,分析了固定车间距离和可变安全距离算法;基于MATLAB/Simulink与CarSim软件联合仿真对控制算法进行分析验证,得到所研究的控制策略及算法效果。结果表明:所研究的控制算法在定速巡航、跟车巡航表现良好,符合实际情况,满足设计要求。
参考文献:
[1]刘海龙.汽车自适应巡航系统控制算法与仿真分析[D].东北大学,2015.
[2]Intelligent transport systems-Full speed range adaptive cruise control (FSRA) systems-Performance requirements and test procedures. GSO2/1/FDS/22179:2012 ISO22179 2009(E).
[3]李肖含. 汽车自适应巡航控制系统模糊控制策略研究[D]. 北京理工大学,2015.
[4]罗莉华.车辆自适应巡航系统的控制策略研究(交通运输规划与管理研究系列)[M]. 上海交大出版社,2013.12.
[5]刘丽华.汽车自适应巡航系统控制策略和仿真验证[D]. 重庆交通大学,2019.
[6]高红军.汽车自适应巡航控制系统模糊控制策略研究[J]. 工程技术(全文版),2016(11):00237-00237.
[7]刘中海,何克忠.模糊PID控制器在自适应巡航控制系统中的应用[J].计算机工程与设计,2005,26(3).
[8]刘中海.自适应巡航控制系统设计与仿真[D].北京:清华大学,2005.
猜你喜欢
中国典型病例大全(2022年7期)2022-04-22
内燃机与配件(2022年2期)2022-01-17
中国测试(2018年9期)2018-05-14
电机与控制学报(2018年9期)2018-05-14
电子技术与软件工程(2016年24期)2017-02-23
数字技术与应用(2016年9期)2016-11-09
数字技术与应用(2016年9期)2016-11-09
科技视界(2016年18期)2016-11-03
科技视界(2016年18期)2016-11-03
科技视界(2016年2期)2016-03-30