
有向切换拓扑条件下考虑暂态响应的多智能体H∞一致性控制
2020-03-05 11:28周绍磊赵学远祁亚辉王帅磊
兵工学报 2020年2期
周绍磊, 赵学远, 祁亚辉, 王帅磊
(海军航空大学, 山东 烟台 264001)
0 引言
由于多智能体系统能够高效合理地解决复杂的大规模控制问题,近年来受到了广泛关注,其体现在实际工业系统中的能力以及尚待挖掘的潜力,将作为基础问题的一致性问题推上了控制科学领域的前沿。
一致性问题已经取得了大量成果,其中包括蜂拥[1]、编队控制[2-3]、集结[4]、分布式跟踪[5]等群体性行为领域。文献[6]为多智能体系统设计了基于事件触发函数的控制器,使得系统在达成一致的过程中节约了宝贵的通信资源。文献[7]研究了一种混合型多智能体系统的一致性问题,并提出了3种控制协议,针对采样周期的不同限制,给出了混合多智能体系统达成一致的充要条件。文献[8]利用反馈线性化方法将一类非线性智能体系统化为标准型,然后设计了一致性协议,并且根据下三角矩阵性质分析了协议的性能指标。
关于一致性问题的研究,现有的结论多集中在固定拓扑或无向拓扑中[9-10],这对系统的通信能力提出了极高的要求。而在实际情况下,多智能体之间的通信网络极容易受环境影响,智能体距离超过最大通信距离,运动过程中出现障碍物阻碍通信等情况都有可能使得固定的拓扑结构出现通信中断现象。无向拓扑结构显然是有向拓扑的一种特殊情况,即每个智能体均可以接收发送信息,这对智能体的传感器提出了很高要求,无形中增加了成本。相比于固定拓扑和无向拓扑图,文献[11]研究了在切换拓扑条件下无人机系统的编队控制,其中每个拓扑图均为一般有向拓扑图,突破了固定拓扑和无向拓扑的局限性,因此本文所要研究的有向切换拓扑条件下多智能体系统的一致性控制问题也更加具有一般性和实际意义。
在实际系统中,外部扰动的存在,对系统达成一致造成了极大障碍,将外界扰动考虑其中更具有实际意义。如果所设计的控制器能够有效抑制扰动,那么对系统达成一致性便有了非常好的控制品质。文献[12]利用多重比例积分控制器,使得异构多智能体系统存在常数扰动时达到一致。文献[13-14]针对多智能体系统受到已知干扰建立观测器,将有干扰情况下的一致性问题转化为自治系统稳定性问题。文献[15]研究了具有1阶、2阶动力学模型的多智能体系统在外部常数扰动下的一致性问题。在文献[16-17]中均考虑了外部扰动的存在,并设计了基于输出反馈的控制器抑制了扰动影响并实现了一致性控制。文献[18]设计了控制器使得基于无向图的线性多智能体系统在受到外部未知扰动时达成一致。考虑外部扰动,文献[19]基于观测器理论设计了控制器,使得带有扰动的2阶多智能体系统达成一致。文献[20]研究了有向拓扑条件下考虑外部扰动的H∞控制。为了抑制扰动文献[21]使用了一种基于动态反馈的观测器解决了固定拓扑条件下的H∞控制一致性问题。文献[22]研究了无向通信拓扑条件下不确定的线性多智能体系统分布式鲁棒性控制问题。文献[23]提出了一种分解方法来解决具有相同耦合离散时间的线性多智能体系统的分布式H∞控制问题。在多智能体系统工作期间很容易受到外部随机产生的短时有界扰动,如多无人机系统飞行过程中受到阵风的影响,多无人潜航器在水中受到海流的影响,同样多无人机等智能体躲避障碍物的行为也可以视为短时有界干扰。现有结果多是针对已知扰动[12-15],且多智能体系统的通信拓扑多为固定拓扑[12-23],如之前分析固定拓扑图对系统具有很强的局限性,而在切换拓扑图条件下针对外部随机产生的短时有界扰动相关成果很少,故研究如何设计H∞一致性控制器,使得系统在切换拓扑条件下实现一致性并满足给定的暂态性能指标,对外界扰动起到较好的抑制作用更具有实际意义。
一致性问题可以分成带领导者的一致性问题和不含领导者的一致性问题。文献[24]研究了切换拓扑条件下不含领导者的具有非线性动力学的多智能体系统一致性问题。文献[25]研究了2阶多智能体系统具有一个或者多个领导者的有限时间一致性问题。领导者是一个运动学独立于其他智能体的特殊智能体,它可以对跟踪智能体产生影响,反之通常不成立,故可以通过控制领导智能体的运动来完成对多智能体系统最终状态的控制,这样使得多智能体系统的控制简化,同时也降低了控制成本。因此研究带领导者的一致性问题,也称为追踪问题更加具有实际意义。
本文将要研究包含一个领导者的多智能体系统,在有向切换拓扑条件下考虑暂态响应的H∞一致性控制,使得系统即使受到外部扰动影响也能达成一致,并具有好的控制品质,本文中外部扰动是短时有界随机产生的。将现有的在无向固定拓扑,有向固定拓扑的通信拓扑条件释放为有向切换拓扑,研究所得结果更具有一般性。通过变量代换,将一致性问题转化为稳定性问题,并利用线性矩阵不等式求解,使得问题求解难度降低。
1 图论及相关引理


引理1[26]图G的Laplacian矩阵L至少有一个零特征值,其他非零特征值均具有正实部;如果有向图G包含有一个有向生成树,则0是L的简单特征值,1N是其对应的右特征向量。

1)S(P)<0;


根据文献[24]可以得到类似的引理3:

2 问题描述及分析
考虑一个由N个具有相同动力学模型的智能体构成的多智能体系统,当智能体系统受到外部扰动时,其动力学模型描述为
(1)
式中:i=1,2,…,N;xi(t)为智能体i的状态;ui(t)为智能体i的控制输入;yi(t)为智能体i的控制输出;ωi(t)∈L2[0,∞)为智能体i的外部扰动,L2[0,∞)表示在[0,∞)上的平方可积函数;A、B、C、D是具有合适维度的系统矩阵。设智能体i=1为领导者,智能体i=2,3,…,N为跟随者。
如何设计控制器使得多智能体系统无论扰动存在与否,都能达成一致,并且当外部扰动存在时,所设计的控制器能够有效地抑制扰动,同时满足暂态性能指标,为本文研究的主要问题。
基于局部邻居相对状态信息,将领导者和跟随者的控制器设计为
(2)
式中:K1和K2为待求矩阵;c为耦合系数。
定义智能体偏差变量为
zi=C(xi(t)-x1(t)),i=2,3,…,N.
(3)
令θi=xi(t)-x1(t),i=2,3,…,N,θ(t)=[θ2(t),θ3(t),…,θN(t)]T,z(t)=[z2(t),z3(t),…,zN(t)]T,则可得
(4)


对于预先给定的抗扰动衰减指标γ>0,称控制器使得系统实现了满足暂态响应性能的H∞一致性控制,如果所设计的控制器能够使得多智能体系统满足以下两个条件:

2)当ω(t)≠0时,在零初始条件下,γω<γ,即智能体偏差变量满足

3 控制器设计
有向切换拓扑条件下考虑暂态响应的多智能体系统H∞一致性控制器的设计步骤如图1所示。

图1 控制器设计步骤Fig.1 Design procedure of controller
计算反馈矩阵所用线性矩阵不等式如(5)式:
(5)


(6)


(7)


(8)
整理可得(6)式成立,证毕。
考虑如(9)式的连续Lyapunov函数:
V(t)=θ(t)T(Qσ(t)⊗P)θ(t).
(9)
当t∈[tk,tk+1)时,V(t)是连续的。令K2=BTP,对(9)式沿着系统(4)式求导,可得

(PBBTP))θ(t)+ 2ωT(t)((FTQσ(t))⊗(PD))θ(t).
(10)
根据引理3有

(11)
根据引理2,当且仅当

(12)
时,(5)式成立,显然有
ATP+PA-2α0cPBBTP+βP<0.
(13)
如果切换系统平均驻留时间满足
(14)
ATP+PA-2α0cPBBTP+P<0.
(15)
当ω(t)=0时,

(16)
由(15)式可得
(17)
根据(9)式和(17)式可得
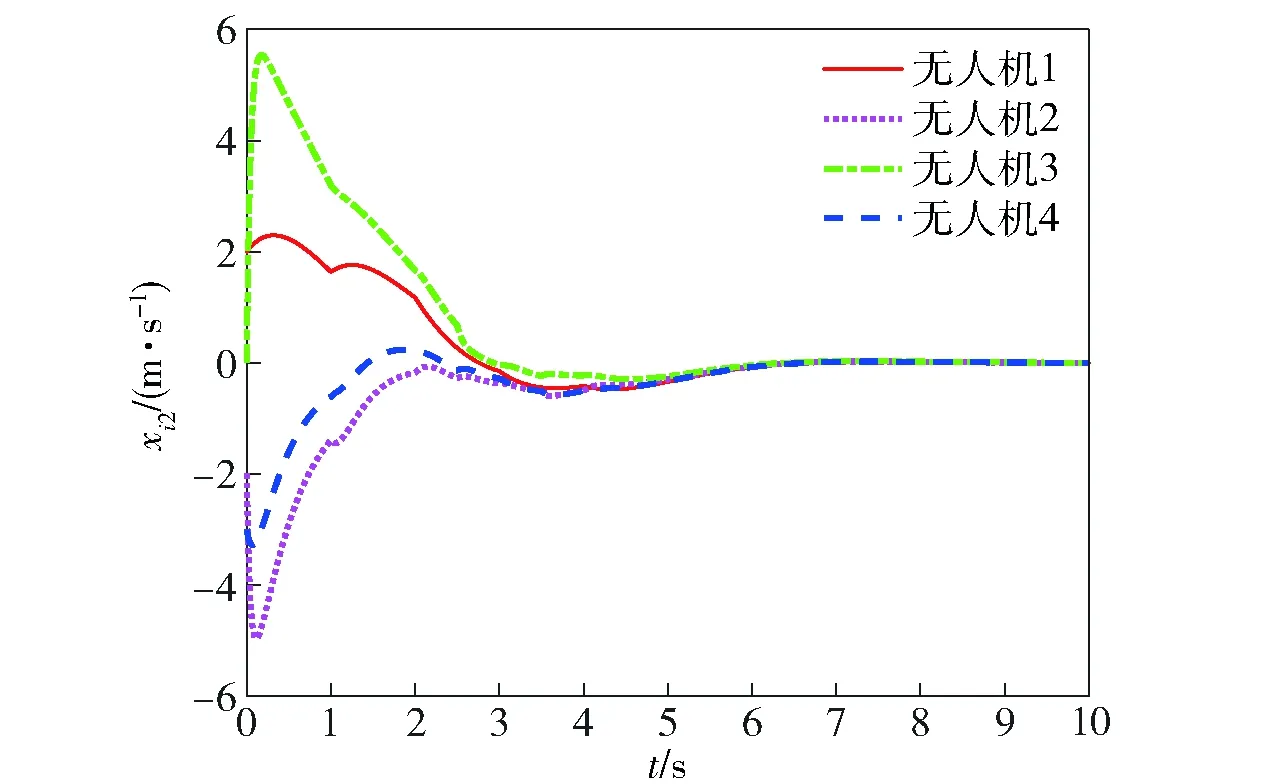
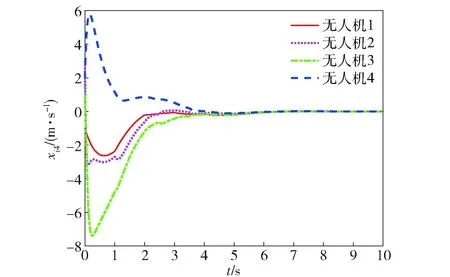
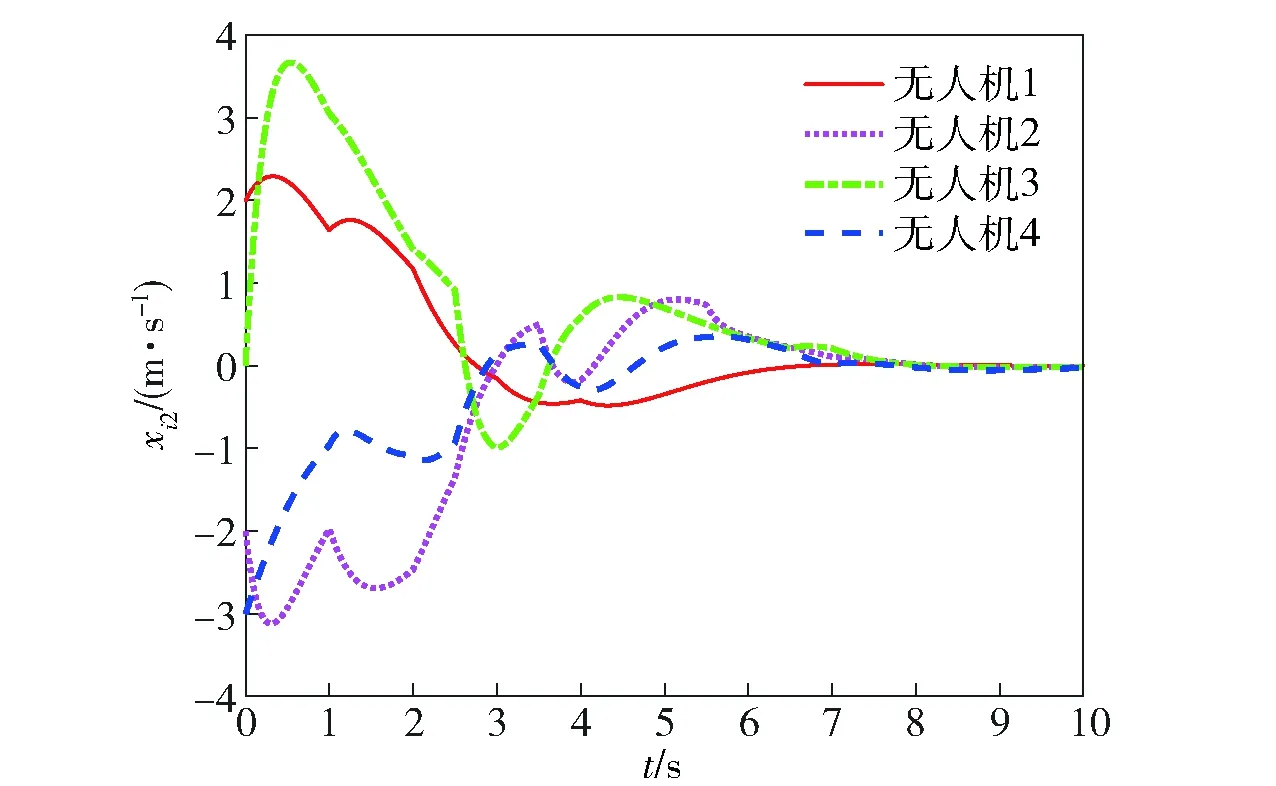
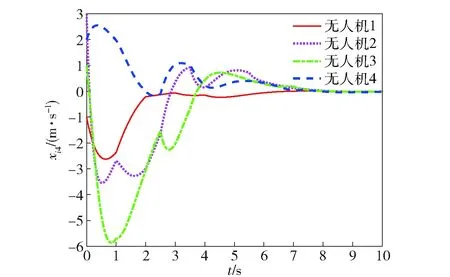
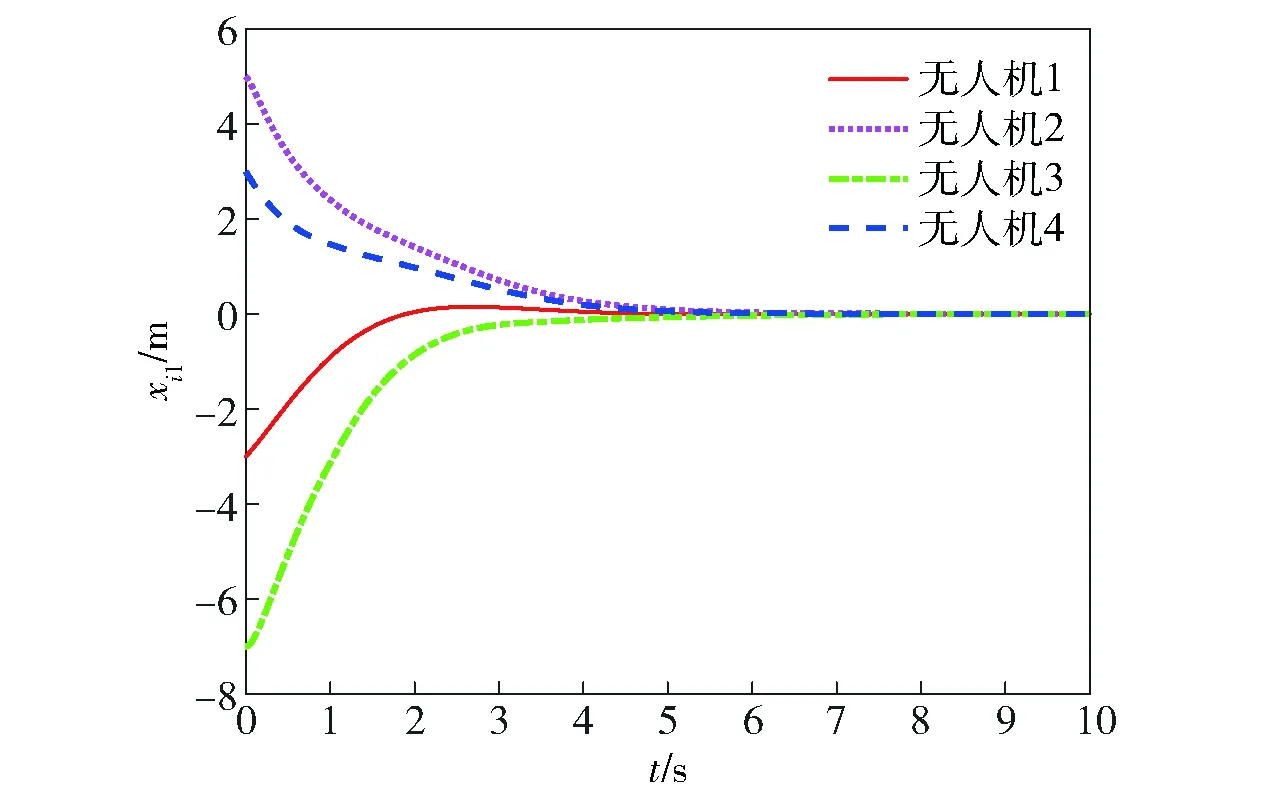
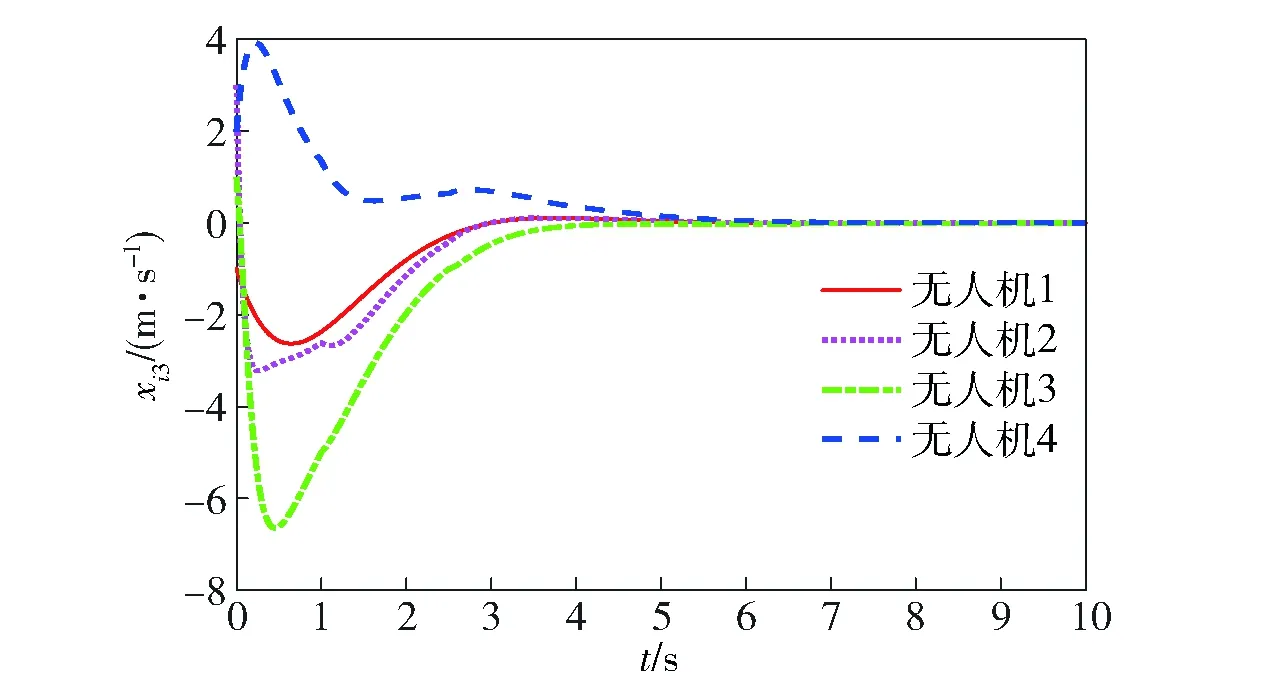
V(t) (18) 考虑到对于任意i∈S,有ηI≤Qσ(t)≤φI,所以在切换时刻tk时有 (19) 进行迭代推理可得 (20) (21) 当ω(t)≠0时, (22) 则 (23) (23)式两边同时加上βθ(t)T(Qσ(t)⊗P)θ(t),可得 (24) 式中: (25) (26) 根据引理2,Θ<0当且仅当 (27) 时,又因为Qσ(t)≤φI,FFT≤φI,则 (28) 对于任意时刻均成立。 (29) 对于零初始条件,有V(0)=0,则 (30) 又因为1<ξ(t)<μ,所以 (31) 文献[29]研究了有向图下考虑暂态响应的多智能体H∞一致性控制,而本文所研究的是在有向切换拓扑条件下带有领导者考虑暂态响应的多智能体H∞一致性控制。有向切换拓扑图使得系统对通信要求降低了,且固定拓扑就是切换拓扑的一种特殊情况;包含领导者的一致性问题(追踪问题)的解决,使得可以通过控制领导者进而控制整个智能体系统。因此本文研究内容更加具有普适性和实用性。 文献[13-14]所研究的干扰是已知的动态模型,可以通过解耦将一致性问题转化为稳定性问题,本文所研究的干扰是随机产生的,因此无法通过直接解耦解决问题,这无形中增加了研究难度。而在实际中,研究这种随机产生的有界扰动更具有意义,例如多无人机系统在飞行过程中,所受到短时间侧风的影响。 本文针对多智能体系统实现含有领导者的一致性过程中受到短时有界干扰问题,建立控制器,根据H∞控制的相关概念和思想,研究了多智能体系统能够在满足给定暂态性能指标的前提下达成一致问题。 多无人机系统的通信拓扑从如图2所示有限拓扑集合中随意切换,其中4个拓扑图G1、G2、G3、G4均包含一条有向生成树。拓扑切换过程如图3所示,σ(t)的当前值表示t时刻多无人机系统通信拓扑图的序号,即t时刻多无人机系统的通信拓扑图为Gσ(t). 图2 有限的拓扑集合={G1,G2,G3,G4}Fig.2 A finite set of topologies ={G1,G2,G3,G4} 图3 拓扑切换过程Fig.3 Topology switching process 在考虑暂态响应时,所设计的控制器,使得系统满足暂态响应性能指标,各无人机东向位置、东向速度、北向位置、北向速度分别如图4~图7所示。为描述方便将图4~图7称为第1组图。 图4 考虑暂态响应时无人机东向位置Fig.4 UAV eastward position with considering transient response 图5 考虑暂态响应时下无人机东向速度Fig.5 UAV eastward speed with considering transient response 图6 考虑暂态响应时无人机北向位置Fig.6 UAV northward position with considering transient response 图7 考虑暂态响应时无人机北向速度Fig.7 UAV northward speed with considering transient response 不考虑暂态响应时,所设计的控制器使得无人机系统趋于一致,各无人机东向位置、东向速度、北向位置、北向速度分别如图8~图11所示。为描述方便将图8~图11称为第2组图。 图8 不考虑暂态响应时无人机东向位置Fig.8 UAV eastward position without considering transient response 图9 不考虑暂态响应时无人机东向速度Fig.9 UAV eastward speed without considering transient response 图10 不考虑暂态响应时无人机北向位置Fig.10 UAV northward position without considering transient response 图11 不考虑暂态响应时无人机北向速度Fig.11 UAV northward speed without considering transient response 在不受外部扰动影响时,所设计的控制器使得无人机系统趋于一致,各无人机东向位置、东向速度、北向位置、北向速度分别如图12~图15所示。为描述方便将图12~图15称为第3组图。 图12 不受外部扰动时无人机东向位置Fig.12 UAV eastward position without external disturbance 图13 不受外部扰动时无人机东向速度Fig.13 UAV eastward speed without external disturbance 图14 不受外部扰动时无人机北向位置Fig.14 UAV northward position without external disturbance 图15 不受外部扰动时无人机北向速度Fig.15 UAV northward speed without external disturbance 当存在外部随机扰动时,考虑暂态响应和不考虑暂态响应,以及不存在外部随机扰动时,所设计的控制器均能使多无人机系统达到一致,但是在控制品质上存在明显的差异。从第3组图可以看出4架无人机构成的系统在5 s时达成一致,此后保持一致状态运行,表明在不受外部扰动影响时,所设计的控制器能够使得无人机系统达成一致。从第1组图可以看出4架无人机构成的系统也在5 s时达成一致,此后保持一致状态运行。但是对比3组图,可以发现,第1组图在1~4 s内由于外部随机扰动的影响,无人机系统的位置和速度曲线均产生了波动,因为考虑了暂态响应设计的控制器作用,无人机系统依旧在5 s时各状态达成了一致。从第2组图可以看出4架无人机构成的系统也在8 s时达成一致,此后保持一致状态运行,在1~4 s内由于外部随机扰动,可以清晰地看出无人机系统的各状态曲线都产生了较为强烈的振荡,以至于达成一致的时间较考虑暂态响应和不受外部扰动两种情况下都需多耗时4 s. 综合3组图,考虑暂态响应所设计的控制器抑制扰动效果极为明显,使得系统状态以较小的震荡快速趋于一致,在达成一致时间上与不受外部扰动情况下一样,且状态曲线基本相似。而不考虑暂态响应所设计的控制器,在控制效果上明显不如考虑暂态响应所设计的控制器,震荡剧烈,达成一致时间延后。因此本文提出的在有向切换拓扑条件下考虑暂态响应所设计的H∞一致性控制器能够解决多智能体系统受外部随机扰动时的一致性问题,同时满足暂态性能指标,极具实际意义。 本文给定的抗扰动衰减参数γ用于描述所设计控制器对外界扰动的抑制效果,取值越小则效果越明显,但是在仿真中发现过小的取值会导致(5)式无解,这意味所设计的控制器不能无限抑制扰动,关于γ最小取值本文并未进行研究。而γ取值如若过大则对扰动的抑制效果不明显,所设计的控制器也失去了意义。 本文针对有向切换拓扑条件下多智能体系统受外部有界随机扰动影响时,设计了H∞一致性控制器,使得系统能够追踪领导者达成一致。得出以下结论: 1)利用本文提出的算法设计的H∞一致性控制器,能够有效抑制外部随机扰动对多智能体系统达成一致所造成的影响,并满足给定的暂态性能指标,使得系统能够迅速高效地达成一致。 2)本文所研究的通信拓扑结构为有向切换拓扑,相比较已有的无向拓扑,有向拓扑下得到的结论,降低了对系统的通信要求,所得结论更具有一般性和实际意义。 3)所设计控制器能满足跟踪领导者的一致性,降低了对多智能体系统的控制难度和控制成本,只需通过对领导者的控制,便可以实现对整个多智能体系统的控制。






4 仿真结果与分析











5 结论
猜你喜欢
辽宁教育(2022年19期)2022-11-18
上海师范大学学报·自然科学版(2022年3期)2022-07-11
电气电子教学学报(2022年2期)2022-05-23
汽车实用技术(2022年9期)2022-05-20
汽车实用技术(2022年5期)2022-04-02
北京航空航天大学学报(2021年7期)2021-08-13
能源工程(2021年2期)2021-07-21
导航与控制(2021年6期)2021-02-18
疯狂英语·新悦读(2021年1期)2021-01-27
华东师范大学学报(自然科学版)(2019年5期)2019-11-11
