
可穿戴下肢外骨骼总体方案设计
2020-03-05 02:33
技术与市场 2020年2期
(东北林业大学,黑龙江 哈尔滨 150080)
0 引言
可穿戴外骨骼机器人,又名助力机械,是一款能够为使用者加强承载负荷能力,提供辅助动力,以及帮助其支撑地面的助力机器人,属于可穿戴智能设备[1]。
可穿戴外骨骼机器人作为热门研究领域,在近些年发展迅速,已经具备了针对不同工作领域的不同类型外骨骼。如今外骨骼机器人的应用领域主要是:军事、医疗以及民用[2-3]。
下肢外骨骼总共有3个关节组件:髋关节、膝关节和踝关节。每个关节的运动和受力情况都能对人体产生影响。本文将针对人体下肢,进行外骨骼的整体方案设计。
1 人体步态分析
我们通常把一个健康的成年人感觉最舒适、自如的行走姿态叫做人体步态。他是成年人体最基本的运动状态。人体下肢一侧的脚跟接触地面到同侧脚跟下一次接触地面之间的运动时间叫做一个步态周期[4-5]。步态运动的各个时期如图1所示:我们把一侧脚跟接触地面到脚尖离开地面的过程叫做支撑相,约占整个周期的3/5;把一侧脚尖离开地面到同侧脚跟接触地面的过程叫做摆动项,约占整个周期的2/5[6]。

图1 人体步态
2 人体下肢各关节生物力学模型及其运动学分析
2.1 人体下肢生物力学模型分析
通常在进行人体各关节运动研究时,要对人体基本参考系进行研究。在医学研究和体育学中常用的参考系如图2所示。整个参考系由失状轴、冠状轴、垂直轴3个轴组成,同时具有冠状面、矢状面和横断面3个平面。人体各个关节的运动形式,可以大致分为屈伸运动、收展运动和旋转运动3种[7]。
如图3所示,参与人体下肢运动的关节有很多,而且大多数是多自由度关节。设计时下肢有些部位也存在一些少动或不动关节,这些关节只具备少量的调节功能,所以在外骨骼简化设计中只考虑髋关节、膝关节和踝关节。
2.2 人体下肢运动学分析
人体下肢具有不同的运动形式,大多以串并联的混合旋转结构为主,在机构学中可以表现出不同的运动形式[8]。在设计外骨骼机构时,要详细考虑人体下肢的机构运动学,使外骨骼结构也具备人体下肢复杂和精密的机构特点(见图4)。
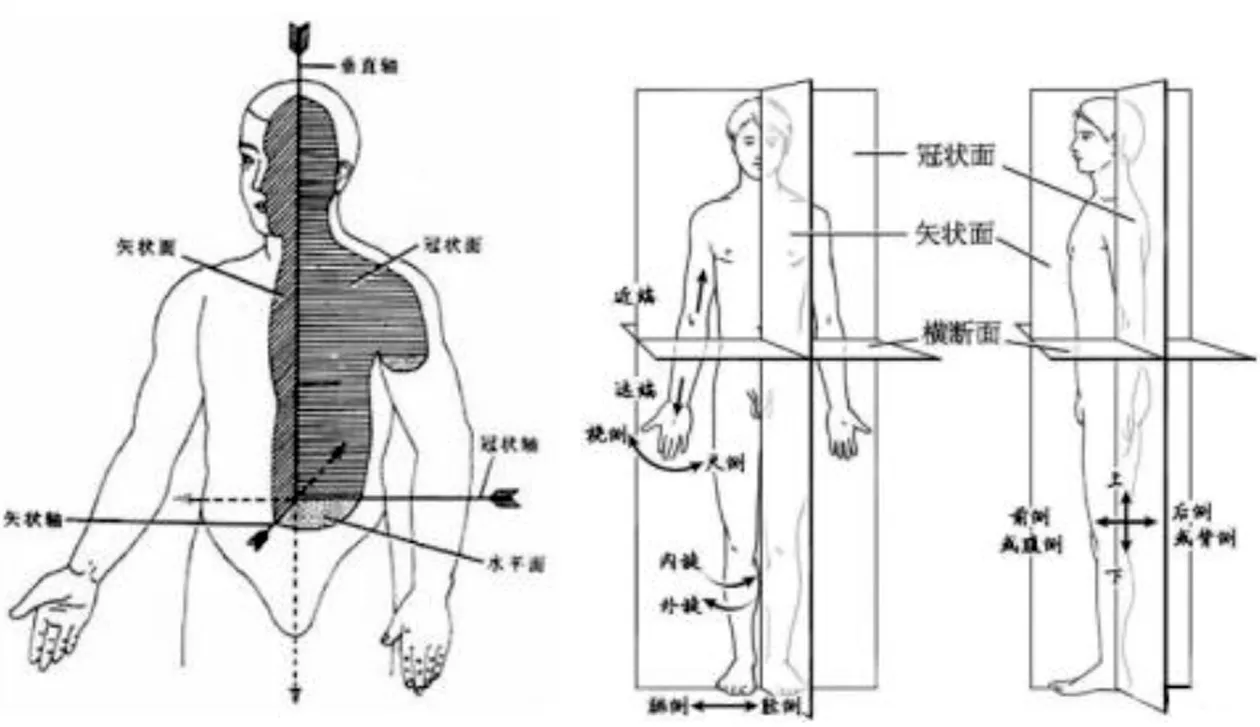
图2 人体基本平面及轴线

图3 人体重要骨骼及关节

图4 人体下肢关节分布情况
通过对人体下肢骨骼机构的分析,可以将髋关节和踝关节均看作具有3个自由度的球副机构,将膝关节看作只有1个自由度的转动副机构[9]。下肢骨骼与腰部盆骨相连,组成双下肢的运动链,简化后的下肢骨骼构型如图5所示。

图5 下肢骨骼简化模型D-H坐系
通过人机工程的相关资料数据分析,可以得到我国正常青年男子的身高与骨骼的大致比例。根据比例,可以得到人体各关节中心的相对尺寸,从而确定外骨骼各连杆和副之间的尺寸参数(见图6),其中:l0=0.039 H;l1=0.246 H;l2=0.245 H;l3=0.191 H。

图6 骨骼长度与身高比例关系
人体在正常步态运动中两侧下肢为相对中心对称关系,所以在分析时可以只考虑单侧下肢。本小节以右侧下肢为例,进行运动轨迹方程求解。[10]式中l3,l4均为常值,θ1,θ2,θ3为旋转角度,随着时间t变化而变化,c代表cos,s均代表sin,α、β、γ分别代表对应X、Y、Z轴的旋转角度。

设盆骨中心O4的运动轨迹方程为:

(1)

(2)
根据式(2)可以得到:
所以大腿连杆相对髋关节中心的轨迹方程为:
f1(t)=y1(t)=-l0·y(t)
(3)
小腿连杆相对膝关节中心的轨迹方程为:
(4)
当已知速度方程时,可以通过下肢连杆末端的速度X和下肢各连杆的初始位置求得运动学逆解,得到关节转动曲线。设:
(5)

3 外骨骼踝关节驱动系统结构设计
3.1 外骨骼结构设计要求
外骨骼机器人是一种典型的人机结合设备,需要具备良好的舒适性和稳定性,保证人机协作效率良好。具体设计要求如下。
3.1.1 外骨骼拟人设计要求
外骨骼各关节的拟人设计是外骨骼各关节机构穿戴舒适且与人体运动功能相一致的前提,根据人体各关节位置进行尽量精确排布关节自由度位置,设计合理的运动副替代结构;针对人体下肢特点,设计合理的约束机构,其穿戴部分尺寸可调。
3.1.2 外骨骼人机运动适应性要求
人体运动过程中,设备与人体的相对位置可能会产生偏移,因此需要设计一些机构以适应人体运动过程中产生的人机相对位置变化,设备穿戴后无论何种绑缚状态,势必要留有一定空间给人体进行自调整,运动过程中这样的空间会造成人机一定程度的偏离,保证适应性的关键是为设备和人体设计合理的空间位置,选择适应性较强的人机连接方式,或者设计一个调整机构或在结构本体或在驱动系统中,以适应足部屈伸带动小腿肌肉的变化,实现外骨骼各关节部件的位置自调整。
3.1.3 外骨骼机体运动范围要求
外骨骼机构设计时,应满足机体运动范围大于正常的人体运动范围,保证在规定范围运动时能够达到人体需要而机器不产生干涉,不与其他部件产生碰撞;再在各关节处增加限位部件,起到保护作用。
3.2 外骨骼关节布置方案
已知影响人体下肢步态运动的自由度共有7个,但是踝关节处的收展自由度在人体正常运动中运动角度很小,可以忽略不计,所以在外骨骼设计时不进行考虑,外骨骼每侧下肢只设计6个自由度。这6个自由度中,髋关节具有屈伸、旋转、收展3个自由度;膝关节具有屈伸运动1个自由度;踝关节具有旋转和屈伸2个自由度。
通过已知的自由度限制,设计2种可行性较高的关节布置方案,如图7所示。

(a)外骨骼关节布置方案一 (b)外骨骼关节布置方案二
在人机穿戴运动时,外骨骼的关节相对人体外置,与人体各个关节的运动轴线不重合,运动中外骨骼与人体下肢实际运动轨迹偏差会很大。为了解决这个问题,需要在外骨骼关节位置布局上进行设计,在保证与人体运动一致的情况下,满足人体所需的舒适度。
设计时,由于3个关节的屈伸自由度运动轴线可以轻易满足与人体运动轴线重合,所以设计重点往往在髋关节的收展和旋转自由度,还有踝关节的旋转自由度上。如图7所示,2种方案在腰部与大腿的连接处均设置了3个旋转轴线相互垂直的旋转副,可以满足髋关节进行正常的大腿内摆外摆运动、大腿屈伸运动和大腿内旋外旋运动;在大腿与小腿的连接处设置了一个水平方向的旋转副,可以满足膝关节水平方向的屈伸运动;在小腿与脚部连接处设置了2个旋转轴线垂直的旋转副,可以满足踝关节的内旋外旋和屈伸运动。2种设计方案最大的区别就是髋关节处收展和屈伸2个自由度的位置变化。方案一中髋关节的收展运动轴线在腰部的后边,可以在人机穿戴时满足与人体髋关节收展运动轴线重合,而方案二中髋关节收展自由度处于大腿与腰部中间,很难与人体髋部收展运动轴线重合,理论误差远远大于方案一。
已知正常人体骨骼之间长度比例大致相同,如果一个人身高为H,那么他的大腿长度即髋关节到膝关节的长度为0.245 H;小腿长度即膝关节到踝关节的长度为0.246 H;踝关节相对地面的长度约为0.039 H。据统计男性身高平均值为175.24 cm,在骨骼结构要设计6 cm的伸长缩短结构,保证这一可调节的范围。采用内杆外杆相对运动的方式实现。
4 结语
本章通过对人体步态进行分析,首先将步态按人体下肢的运动划分成6个状态,然后经过分析论述人体下肢的生物力学模型,并对该模型按构件简化进行运动学分析。最后根据下肢各关节的生物力学模型和运动规律,提出外骨骼的设计要求,对外骨骼的整体方案进行设计。
猜你喜欢
现代仪器与医疗(2022年4期)2022-10-08
现代仪器与医疗(2022年4期)2022-10-08
中老年保健(2021年7期)2021-08-22
小哥白尼(野生动物)(2021年12期)2021-03-29
西南交通大学学报(2018年6期)2018-12-18
电子制作(2018年18期)2018-11-14
自动化学报(2018年6期)2018-07-23
大众健康(2016年3期)2016-05-31
中华骨与关节外科杂志(2016年6期)2016-05-17
中华骨与关节外科杂志(2016年3期)2016-05-17
