汽车前碰撞预警系统测试法规的对比解析
2020-03-13 07:48孟祥虎
汽车电器 2020年2期
朱 龙,周 旋,孟祥虎
(徐州徐工汽车制造有限公司,江苏 徐州 221100)
现代交通运输业和汽车工业的快速发展给人们带来便利的同时,也使得交通安全环境变得更为复杂,交通事故已经上升成为全球性灾害和世界性难题。全球范围内,每年有千万量级的交通事故发生,造成的经济损失多达全球GDP的1%~3%,而其中追尾事故的占比尤为凸显[1](美国占比为29.5%,德国为28%)。随着经济的快速发展和道路状况的改善,我国汽车保有量持续攀升,交通事故总量呈上升趋势,据统计,我国万车死亡率已居世界首位[2]。面对交通安全问题的严峻形势,汽车主动安全越来越受到广泛的关注,作为主动安全技术的核心组成部分,前碰撞预警系统 (Forward Collision Warning System,FCWS)已成为该领域的重要研究课题。国内外也相继发布了相关行业标准推动汽车主动安全技术的发展[3,4]。
然而,FCWS的测试标准虽测试方法类似,但指标有所差异。2014年我国交通部发布了针对营运客车的前车碰撞预警系统测试规范JT/T 883-2014《营运车辆行驶危险预警系统技术要求和测试方法》[3](下文简称“883”),2017年质监局与标准委员会联合发布GB/T 33577-2017《智能运输系统车辆前向碰撞预警系统性能要求和测试规程》[5](下文简称“33577”),韩国国土交通部也发布了相关的测试法规推动FCWS的落地与发展(下文简称“KC”)[6]。本文对上述法规进行了对比分析,并对系统测试性能指标要求进行了深入解析,为系统开发和应用提供参考。
1 探测范围的要求
探测范围是视觉、毫米波雷达以及激光雷达等ADAS感知传感器最为重要的指标之一,探测范围的远近直接决定了基于目标感知报警及控制决策的及时性。探测范围越远,越能提升车辆前方目标与本车的相对运动状态预判的可靠性,从而能够在有潜在碰撞危险时,提前足够长的时间进行决策。显然,针对ADAS性能测试的法规制定者深知其重要性,因此在测试项中也有考虑车辆动力学及驾驶因素的探测范围评估方法。对现行的法规而言,KC中没有对传感器探测范围的明确规定;而883及33577对探测范围有同样的规定,其计算方法如下式:

式中:vmax——系统运行时的自车最高车速;Tmax——警告后驾驶员的最长制动反应时间;amin——自车满载充分制动时所能达到减速度的最低标准。
式 (1)计算最大距离的方式,实际上考虑了两个方面:①驾驶员反应时间内的行驶距离;②驾驶员进行制动操作后,与车辆制动性能相关的最大制动距离。事实上,综合考虑两者得到的最大探测范围是考虑感知可靠性的探测范围的最不利情况,从而最大限度地保障主动安全系统的有效性。以国内高速路段限速120km/h为例,假设人的反应时间为1s,且能达到的最小减速度为-5m/s2,则最低探测范围应该超过144m。这一距离远远超过报警时刻的距离 (40~80m)。因此,KC对此没有明确规定是不全面的。
2 碰撞时间测试标准
根据法规要求,KC、883以及33577三种标准前车碰撞工况CCRs (Car-to-Car,stationary)、CCRm (Car-to-Car,moving)以及CCRb(Car-to-Car,braking)下碰撞时间TTC的规定如表1所示。总体而言,中、韩FCWS碰撞时间TTC的范围设置不同,883对碰撞时间没有上限要求,因此ADAS设备只要设定足够长的时间,无论是3s还是5s甚至更大的值均能通过测试标准。显然,这一点是不合理的,因为提前较长时间报警 (车距足够长,并不存在碰撞危险)会对驾驶员正常驾驶产生干扰。
据统计,典型驾驶员感知-反应时间范围为0.9~2.1s,95%的驾驶员感知反应时间为1.6s[7]。基于此,按照法规的要求,剩下的最短操作时间如表2所示。显然,法规规定最小TTC标准下,剩余的操作时间不足以使得车辆完全避免碰撞。
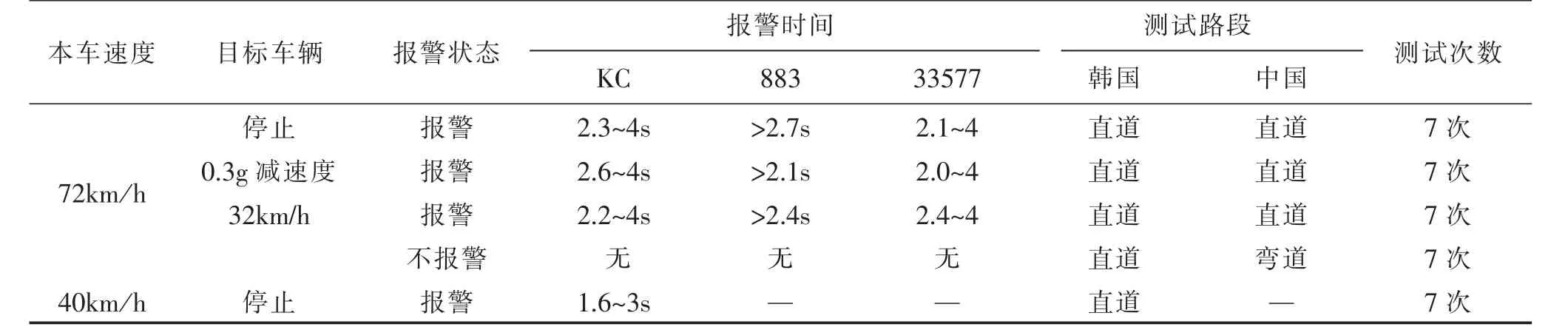
表1 TTC碰撞时间标准对比

表2 驾驶员最短操作时间
再者3种法规均对报警时刻的距离精度进行了规定。
1)KC规定7次重复测试,至少5次通过才算通过,且5次TTC的偏差不能超过15%。
2)883规定报警时刻的距离与系统设定的距离偏差不能超过5%或±1m,但没有可重复性的要求。
3)33577规定非自适应系统7次重复测试,至少5次通过才算通过,且5次均需要满足报警距离偏差不能超过15%或±2m的要求。
综上所述,883仅考虑了系统的精度,并未考虑系统多次重复执行时的稳定性,对于实际应用而言,这一点883存在不足。KC与33577对系统的精度和稳定性均有要求,且起到异曲同工之效。
3 ETTC的必要性
相对于883及KC,33577引入了强化距离碰撞时间的概念。一般而言,碰撞时间TTC确定算法是通过车辆与前方障碍物 (一般为车辆)的相对距离和平均相对速度决定[15]:

式中:V(t)——t时刻的瞬时相对速度,用以取代较小时间间隔Δt内的平均相对速度;Z(t)—t时刻的相对距离。
事实上,本车与前车的相对加速度一般不为0,因此假定其为0的做法可能引起TTC估计的偏差。那么,将相对加速度确定的TTC定义为Ta(t),存在如下关系:

式 (3)假定从t时刻开始直到碰撞发生,本车与前车间的相对加速度为常数a(t),且经过Ta(t)的延时,距离减小到0。解方程 (4)可得:

为了说明上述两种计算TTC算法的差异,按照JT/T 883-2014关于TTC的测试方法 (图1),自车与前车相距30m,均以72km/h的速度同向行驶,在某一时刻前车以0.3g的减速度开始制动。按照标准的要求,TTC报警时间应大于2.4s,假定TTC=2.7s报警,TTC与前车制动时刻的关系如图2所示。

图1 试验过程示意图
由图2可以看出,基于相对速度的TTC确定算法在前车紧急制动后2.52s发出警报,而基于相对加速度的TTC确定算法在前车紧急制动后1.77s发出警报,前者比后者延迟约0.8s的时间,也就是说,如果基于采用相对加速度的TTC确定算法将提前16m进行报警,可以留出更为充足的反应和制动时间,以进一步降低追尾碰撞发生的风险或者降低事故所带来的损失。

图2 TTC随前车紧急制动时间的变化
4 感知干扰测试要求
通过视觉、毫米波以及激光雷达对目标进行感知与定位,会出现非危险区域目标的干扰。对于毫米波雷达而言尤其显著,因为毫米波雷达在没有车身姿态估计和车道线约束的前提下,无法辨识目标是否为碰撞区域的目标。因此干扰测试的目的主要是对前车碰撞预警系统误报或者误操作的验证。3种规范对于该项内容的考核机制如表3所示 (√表示有规定,×表示无规定)。由表3可以看出,国内标准在此项测试要求比KC更完善,且33577考虑的因素最多,更为全面考虑各种传感器可能存在的缺陷。

表3 系统抗干扰测试
5 结论
本文对中国和韩国关于汽车前向碰撞预警系统的测试法规进行了对比分析,得到的主要结论如下。
1)总体而言,中国法规测试项的考虑更为全面,但是对于TTC没有规定上限,测试要求稍显不足,韩国KC认证没有对探测范围感知传感器的重要性能指标进行规定,显然是不合理的。
2)各法规对于TTC下限的规定,按照驾驶员的正常反应时间再进行制动操作无法完全避免碰撞。
3)在两车相对速度较大时,强化距离碰撞时间的引入是非常必要,能够预留充足的反应和制动时间,使得前碰撞预警系统更为可靠。
4)33577是883基础上的完善,参照此法规的测试标准,能够全面反映前车碰撞系统的性能。
猜你喜欢
财会学习(2022年7期)2022-11-13
中国交通信息化(2022年7期)2022-10-27
医学食疗与健康(2021年27期)2021-05-13
科学与财富(2021年33期)2021-05-10
环球时报(2019-12-30)2019-12-30
计算技术与自动化(2015年3期)2015-12-31
建材发展导向(2014年2期)2014-05-04
中学生数理化·高一版(2008年6期)2008-11-15
棋艺(2001年8期)2001-06-14
棋艺(2000年18期)2000-06-14