地面力学在火星壤力学参数估计研究中的进展与展望
2020-03-13 09:03党兆龙陈百超李建桥
宇航学报 2020年2期
薛 龙,党兆龙,陈百超,李建桥,邹 猛
(1. 江西农业大学工学院,南昌 330045;2. 江西省现代农业装备重点实验室,南昌 330045;3. 中国空间技术研究院北京空间飞行总体设计部,北京 100094;4. 吉林大学工程仿生教育部重点实验室,长春 130022)
0 引 言
为了寻找地外生命和可宜居星球,从登陆月球到对火星及太阳系中其他的天体的探测,人类的深空探测脚步从未停歇。但是由于地外行星恶劣的自然环境,使得人类必须使用可移动的星球车来完成对地外行星的研究和探测。即使人类可以在地外行星行走,也需要星球车来辅助人类完成各项科学探测及扩大人类探索的范围[1-2]。这就要求星球车具有良好的机动性、平顺性和通过性,使之能够顺利通过松软、颠簸的地外行星表面[3-5]。星球车的越野机动性不仅与地面障碍物和地形特性有关,还与车辆外形、车轮形状[6]和地外行星壤的特性有关[7]。而全面准确的了解行星表面星壤的物理力学参数,对于轮式星球车的路径规划、通过性能评估、自主导航、风险预测、仿真计算和脱困具有十分重要的意义。
由于受到火箭发射载荷的限制,目前的火星车并没有携带专用的测量火星壤力学参数的设备,因而无法实时准确的获取火星壤的力学参数。但根据车辆地面力学理论,基于轮壤作用数学模型可对轮下及火星车周边火星壤的力学参数进行辨识。
为了更好的支持火星探测任务,本文探讨了复杂火星地面对火星车移动性能的影响,分析了基于地面力学的火星壤力学参数辨识方法,总结了基于车轮的在轨火星壤力学参数辨识方法,给出火星壤的力学参数测试结果,并对未来地面力学在火星巡视探测领域的发展方向进行展望。
1 反演的目的和意义
目前,美国是火星探测最成功的国家,共有八个着陆器和火星车已经成功登陆火星表面并进行科学探测研究,其登陆时间和地点以及运行状态如表1所示[8]。从美国火星着陆器和火星车发回的照片和数据可知,火星表面遍布着陨石坑、火山、沙丘与峡谷,且大部分被一层松散的火星壤覆盖,一旦火星车车轮打滑并陷入其中,将导致巡视探测任务失败[9]。例如,2009年5月7日,勇气号的轮子陷入火星特洛伊沙地,车轮刨开了地表的一层硬壳,硬壳大约有2.45 cm(1英寸)厚,硬壳下面露出了松软的含沙物质。当勇气号开始尝试摆脱困境时,它的车轮又搅起了更多的含沙物质。这些物质含有高浓度的硫酸盐,比在火星上其他地区所看到的物质中硫酸盐的浓度要高得多。根据车轮的直径(约26 cm),车轮所陷入的深度大约有30 cm。为了帮助勇气号脱离困境,地面控制人员在土槽中对其状态进行了模拟,以期找出使其脱困的方法。但随着火星严冬的临近,勇气号的太阳能帆板已经无法吸收到足量的阳光供发电之用,它最终没能挨过残酷的冬天[10],勇气号在火星表面共运行了7.7 km。
勇气号并不是唯一一个陷入松软沙地的火星车,在梅里迪亚尼平原机遇号的六个车轮也曾陷入沙地达30 cm。为使机遇号脱困,科研人员同样利用模拟火星壤进行地面土槽试验,以图寻找最佳的方法使机遇号脱离束缚。所幸的是经过23个火星日的努力,在地面指令的控制下机遇号终于摆脱了束缚[11],而此处沙地也被正式的命名为“Purgatory Ripple”如图1所示。勇气号和机遇号车轮的沉陷主要是因为松软的火星壤加剧了车轮的滑转和车轮的沉陷,即车轮与火星壤所构成的地面车轮系统所能提供的驱动力不能克服地面的阻力。

表1 美国着陆器和火星车登陆地点和运行状态
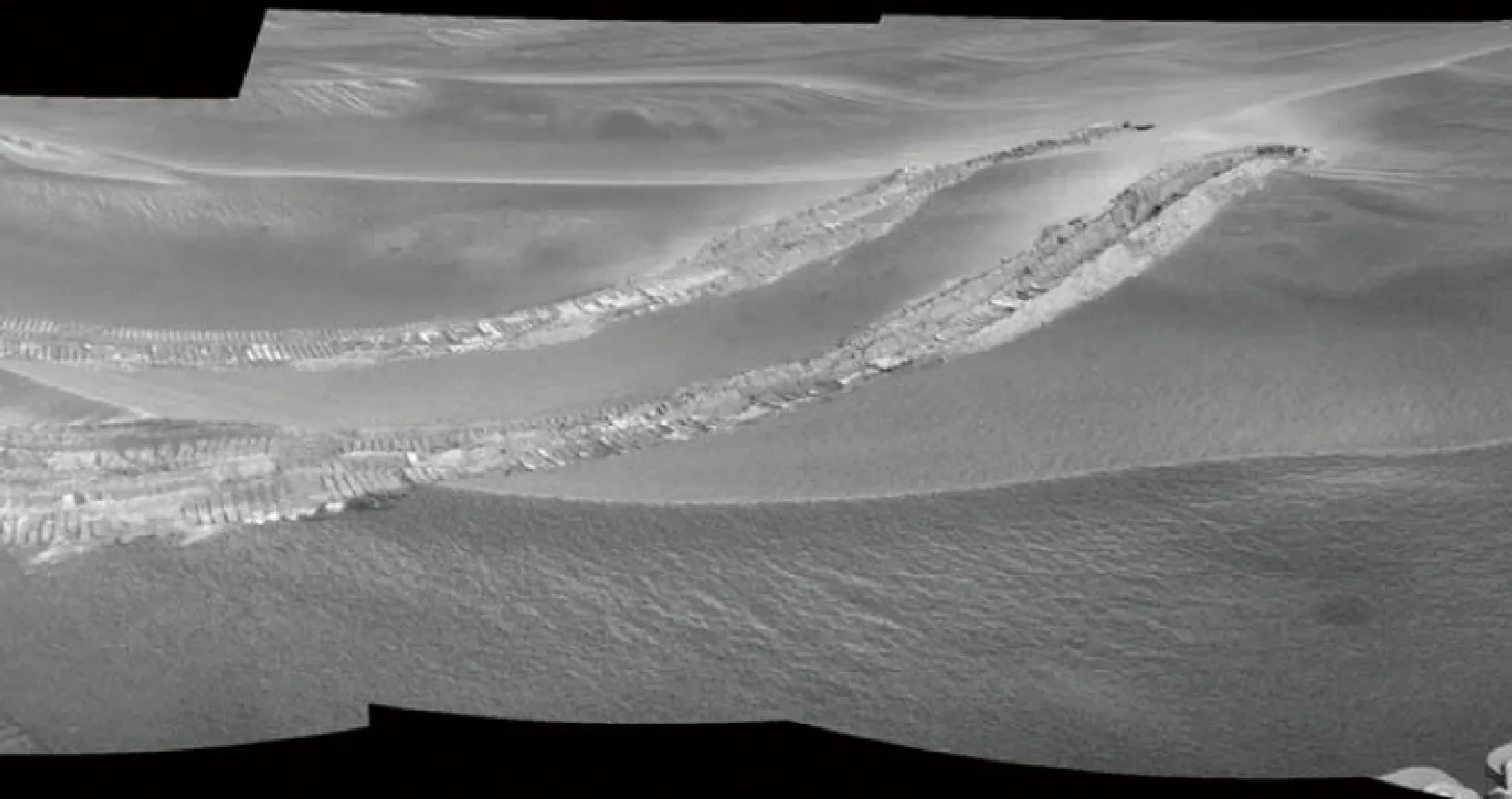
图1 机遇号车轮沉陷于Purgatory Ripple处的软沙中[11]
通过机遇号陷入沙地的深刻教训,当地面人员控制好奇号在火星表面前进时,会定期的通过拍摄图像的方式来观察其是否确实在前进,并根据在线传感器计算车轮实际的移动距离来确定火星车的总体滑转率,并确保车轮的滑转率低于限定值[12]。但是,由于地球和火星之间通讯时差的限制,这种方法也有其缺陷。例如2015年5月7日,好奇号就不得不停下其探索的“脚步”,其原因是由于好奇号车轮打滑,使得实际的行驶距离远远低于预计的19 m。实际上,从2015年5月7日至2015年5月13期间,好奇号试图到达观测目标进行研究的行进过程中,共行驶四次并且其中三次都因为车轮打滑而不得不中止行驶,以避免好奇号陷入沙地中。通过好奇号相机拍摄的图像显示,火星表面的沙丘横亘在好奇号和观测目标之间,因此在路径规划时选择了沙丘周围的一处看起来更坚固的地面,但是当好奇号达到这个区域时,意外发现这里竟然也是由松散物质构成的,说明火星表面具有非常大的欺骗性。图2为好奇号在沙丘表面留下的车辙痕迹。
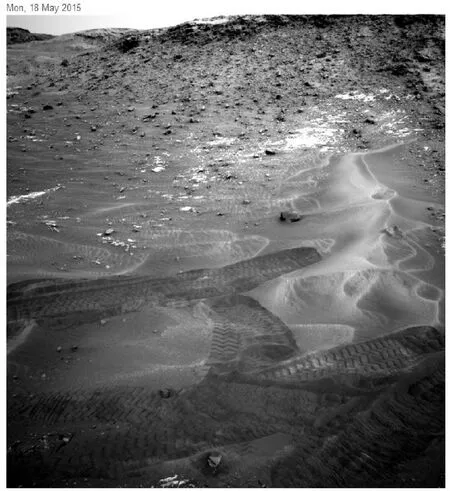
图2 好奇号在火星表面留下的车辙[13]
可见,采用火星车进行探索和科学研究时,了解和掌握其周边火星壤的力学状态尤为重要,特别是在路径规划、风险评估、牵引控制等方面有着不可替代的作用。
地面力学是研究车辆与松软地面之间的相互作用关系的一门学科[14-20],主要用于设计车辆移动系统、评估车辆通过性能和分析车辆在非常规路面的机动性能。地面力学研究首先需要了解土壤的力学参数,例如:承压模量kφ、内聚模量kc、沉陷指数n、内聚力c、内摩擦角φ和剪切变形模量K,其中前三个土壤参数称为承压力学参数(kc,kφ和n),后三个土壤参数称为剪切力学参数(c,φ和K),而这些参数的测定需要专用的试验设备对土壤进行测试才能获得。但是在地外行星探测过程中,由于发射重量和其它研究项目等方面的各种限制,目前在轨的火星车都没有配备专门的设备测量火星壤的物理力学参数,而是需要应用火星车或登陆器的触土部件(车轮或者采样铲),基于地面力学理论对火星壤的力学参数进行估算。车轮作为火星车重要组成部分,承担载重、牵引和移动的功能,并且始终与地表接触,因此根据轮壤相互接触模型对火星壤的力学参数进行估计成为可能。
2 轮壤接触模型简介
当刚性车轮以一定速度向前运动时,在轮上载荷W和车轮扭矩T的共同作用下,车轮与松软地面间产生的正应力σ(θ)并不是线性分布,而是以最大正应力为分界线划分成两个区域,以最大应力角θm和入土角θ1之间的区域为第一个应力区域,第二个应力区域包含离去角θ2和最大应力角θm,其正应力大小分别是σ1和σ2。车轮与土壤之间的相互作用关系如图3所示,进而得到车轮的受力平衡方程。
(1)
(2)
(3)
式中:W为轮上载荷(N),FDP为挂钩牵引力(N),T为车轮扭矩(N·m),θ1为入土角(rad),θ2为离去角(rad),θm为最大应力角(rad),σ(θ)为正应力(Pa),τ(θ)为剪应力(Pa),r为车轮半径(m),b为车轮轮宽(m)。
从车轮的受力平衡方程可以看出,土壤的力学特性对车轮牵引通过性有着重要的影响,其中承压特性和剪切特性最为重要。承压特性表示的是压力和沉陷的关系,不仅可以对车轮沉陷和阻力进行评估,还可以评估其牵引特性,常用的承压模型主要有Bekker模型[21]、Reece模型[22]、Ishigami模型[23]和滑转模型[24-26]等。剪切特性表示驱动轮轮下土壤剪切应力和剪切位移之间的关系,常用的剪切模型主要有Janosi模型[18]、指数模型[27]和Wong-Reece应力分布模型[18-20]等。可见了解火星壤力学特性,即可计算车轮的牵引力、轮上载荷和车轮扭矩,也可以为车轮设计、风险评估和通过性估计提供依据。但是在火星探测过程中,由于缺乏火星壤力学参数,因此可以通过车轮的受力平衡方程,同时应用已知条件(如轮上载荷、车轮扭矩和滑转率以及车轮沉陷等),在不增加火星车自身重量和专用检测设备的前提下,实现地面力学参数的辨识。
图3 刚性车轮与土壤相互作用关系
3 轮壤接触模型的火星壤力学参数反演方法
3.1 模型简化
由于轮壤表达式(1)~式(3)中包含复杂的积分,很难求得精确的解析解,因此需要对求解表达式进行简化。通过对四种不同类型土壤(干砂、砂壤土、粘土和雪)对比分析,轮下的正应力和剪切应力的分布是对称于最大应力角,并且其分布曲线可以近似的看作线性分布,即以最大应力角为分界的两个简化的线性方程表示[28-31],然后对式(1)~式(3)进行求解,得到包含正应力、剪切应力和入土角的简化解。同时以Mohr-Coulomb失效准则为基础,应用式(4)建立了正应力和剪切应力及土壤力学参数之间的关系,该模型也称为Wong-Reece应力分布模型:

(4)
式中:s为滑转率。通过式(4)、承压模型以及简化解,即可建立轮壤之间的动力学模型,对火星壤的力学参数进行辨识。
3.2 牛顿迭代法
应用Bekker承压模型,根据图3的轮壤关系,建立FDP的解析表达式[32-35]。该方法可应用复合辛普森公式、两点高斯数值积分法对解析表达式进行简化求解。由于内聚力变化相对于挂钩牵引力不敏感,即当内聚力变化范围很大时,其计算挂钩牵引力的变化很小。相反,当挂钩牵引力的值变化很小时,对反演的内聚力值的变化影响却很大。另外,当把内聚力和其它土壤参数同时进行反演时,将导致其它土壤参数值与其真实值不符。因此为了避免这种现象的发生,在求解过程中需要设定内聚力为一个合理的固定值。
该方法对φ,ks和K进行求解,其中ks为组合内聚模量,ks=kc/b+kφ。由于该模型共包含有三个未知变量,因此至少需要三组试验数据作为输入数据才能求得收敛解,这三组数据中分别包括挂钩牵引力、车轮滑转率和车轮沉陷,即[FDP,s,z]。对于土壤剪切参数中的内聚力,在求解过程中设置为一个合理的平均值(c=3 kPa),参与土壤力学参数反演。
3.3 最小二乘法
最小二乘法是基于经典的地面力学数学模型,通过求解[c,φ]=f(W,T,z,s)来估计内聚力和内摩擦角,其中z为车轮沉陷。该求解方法令θm=θ1/2,并应用简化的线性模型,得到最大正应力σm和最大剪切应力τm,进而得到包含c和φ的表达式[28-31],如式(5)所示:
(5)

在土壤力学参数反演的过程中,可以通过火星车车载传感器测量记录其行驶时的数据(例如z,T,W及s等)。z可以通过导航相机和避障相机拍摄的车辙图像进行估计[36],T可以通过车轮驱动电机电流计算获得,W可以通过火星车的位姿进行估计,s可以通过车辙图像轮刺的间距或者机器学习回归算法进行估计得到[37]。由于火星车行驶速度较慢,因此在一段较短的距离内就可以收集多对行驶数据,通过收集的数据即可利用最小二乘法求解火星车车轮周边行星壤的力学特性参数。
3.4 耦合法求解
耦合法是一种循环迭代的地面力学参数识别方法,分别利用挂钩牵引力、车轮沉陷和前进阻力矩对接触角系数、承压特性参数和剪切特性参数进行辨识求解[38]。正应力σ(包括前部正压力σ1和后部正压力σ2两部分)的计算模型中,用轮地作用沉陷指数N代替了传统模型中的土壤沉陷指数n,用于反映车轮的滑转沉陷,N由沉陷指数系数n0和n1计算得到。c1和c2为最大应力角系数,通常离去角很小,因此在计算过程中设为零,即c3=0。可计算得到车轮前部和后部的正应力表达式[24]。应用式(4)、简化的线性模型[28-31]和正应力表达式[24]可得轮上载荷、挂钩牵引力和车轮扭矩的解析表达式:
(6)

W,FDP和T是关于所有土壤力学参数的函数,是高度耦合的方程组,因此对众多土壤参数同时求解是不合实际的。进行地面力学参数求解时需要先设定初始变量,给定轮上载荷,可以消除剪切特性参数PIII,同时参数PI对于沉陷量的影响很小,因此可以令c1=0.5,c2=0作为初始值,然后根据测量得到的沉陷量对承压特性参数PII进行反演。根据反演得到的PII和给定的角接触参数,及车轮扭矩对剪切特性参数PIII进行反演。最后,利用反演的PII和PIII进行角接触参数PI的反演。通过上述步骤可以近似实现对土壤参数的估计,但是模型的简化带来了误差,并且辨识得到的参数PI与进行参数PII和PIII辨识时所采用的参数PI不一致。因此在获得初步结果的基础上采用循环迭代的方法进一步进行参数反演。然后按照PII=fW(W,T,s,z),PIII=fT(W,s,z)和PI=fDP(W,T,FDP,s,z)的顺序循环求解[38-43]。
3.5 神经网络法
当轮壤相互作用时,根据式(1)和式(3)建立轮上载荷和车轮扭矩的数学模型,利用简化的线性模型对正应力和剪切应力简化。而最大应力角为θm=(θ1+θ2)/2,车轮与地面的接触角θc=|θ1-θ2|,由于离去角很小因此令θ2=0。对式(1)和式(3)求解,得到W和T的解析表达式[44],如式(7)和式(8)所示:
(7)
(8)
可见,该公式建立了火星壤力学参数c,φ与s,T,W的理论模型,如式(9):
[c,tanφ]T=f(s,T,W)
(9)
当给定的四种地面数据类型的剪切力学参数和车轮半径和轮宽,根据特定车型的试验数据分别选定z(0.005,0.0075,0.01,0.0125,0.015,0.0175,0.02) m,s(0.01,0.02,0.03)和I(50,60,70,80,90,100) mA电机电流可以转换为车轮扭矩T,特征值的选择是应用重量为30 kg的微型探测车Kapvik在松软土壤行驶时的试验数据为依据选定的[45]。对应给定的z,求解滑转沉陷zss与接触角θc[46]。根据s求解j=r(θc+ssin(θc)-sin(θc)),I得到车轮扭矩T。然后计算τm和σm。通过式(7)计算对应的W,同时建立对应的输入数据对[W,T,s]和输出数据对[c,tanφ]。遍历所有给定的四种地面数据类型,形成一系列的输入数据对和输出数据对共504组。然后,应用504组数据训练神经网络,建立预测土壤内聚力和内摩擦角的评估模型,输入变量和输出变量分别为x=[W,T,s]和y=[c,tanφ]。
该方法可以在不需要获得车轮沉陷的前提下,对火星壤的剪切力学参数进行在线估计,并且可对每个车轮周围的火星壤进行同时估计。不仅有利于为充分了解巡视探测器的行驶状态,也有利于巡视探测器的自主导航。
3.6 支持向量机法
最小二乘支持向量机(Least-squares SVM, LS-SVM)法通过训练数据集建立土壤剪切力学参数辨识模型,对火星壤的剪切力学参数进行就位估计。
通常车轮行驶地面特别是地外行星表面,其土壤为塑性地面,车轮行驶过后,土壤的回弹量非常小,基本为零。当应力角θ分别等于0和θm时,可得最大剪切应力和剪切应力偏移量,通过简化的线性模型[28-31]得到轮上载荷、车轮扭矩和挂钩牵引力的表达式[47],如式(10)~(12)所示。
(10)
(11)
(12)
建立火星壤剪切力学参数与s,T,W的理论模型,[c,φ,K]T=f(s,T,W)。
针对定型车辆的车轮,选定s,z和T的合理变化范围[47]。确保所选的值包含尽可能多的数据,并且其值的范围包含了轻载-土槽试验台所采集的s,z和T的最大值和最小值。给定车轮的几何参数,通过解析模型计算入土角,最大剪切应力和最大正应力,计算轮上载荷,建立输入变量x=[s,T,W]和输出变量y=[c,φ,K]组成的训练集数据对共计4237对。建立LS_SVM模型时,应用参数寻优函数Tunelssvm进行网格搜索,优化gam和sig2这两个重要的参数[48]。
当火星车在火星土壤表面行驶时,通过车载传感器获取滑转率、车轮扭矩和轮上载荷后,就可以根据建立的土壤参数辨识数学模型,得出车轮所处位置火星壤的剪切力学参数。
3.7 遗传算法
遗传算法(Genetic algorithm, GA)用于反演行星壤的承压力学参数:组合变形模量和承压指数。根据简化的线性模型[28-31],建立轮壤关系模型的矩阵表达式[49],式(13):
(13)

可以计算得到轮上载荷和挂钩牵引力的表达式如式(14)和式(15):
(14)
(15)

(16)
因此由式(14)、式(15)和式(16)可得,W和FDP的表达式,如式(17)和式(18)所示:
(17)
(18)
对于火星车而言,W,T,s和θ1可由火星车上携带的传感器测量或者估计获得[37, 51]。W与T,s,z和ks,n1,n2成函数关系,其表达式为:
Fz=fz(W,s,ks,n1,n2)
(19)
FW=fW(T,s,z,ks,n1,n2)
(20)
3.8 其他算法
自适应卡尔曼滤波算法(Adaptive robust extended Kalman filter,AREKF),该算法可对预测沉陷指数N和内摩擦角φ进行反演,而其他力学参数需要给定一个经验值[52-53],该方法计算精度高,可适用于在线检测。粒子滤波法(Particle filtering method,PFM)假设土壤参数为具有一定概率密度的随机变量,对土壤的承压力学参数(n,ks)和剪切力学参数进行估计[54],该方法耗时较多。
表2总结了基于轮壤模型的火星壤力学参数辨识的方法,并对各种方法的输入参数、输出参数和优势进行了总结,其中耦合法具有较高的计算精度和土壤力学参数的全面辨识,可实现离线测量。牛顿法具有计算速度快和辨识精度高的优点,适合于在线分析,可实现剪切力学参数的辨识和部分承压力学参数的辨识。神经网络法和支持向量机法,具有计算速度快和不需了解车轮沉陷的条件下进行土壤剪切力学参数在线辨识的优点。遗传算法计算精度高,可实现对承压力学参数的辨识,可适用于在线辨识。
表2 基于轮壤模型的反演方法
4 火星壤参数辨识在火星车上的应用
4.1 索杰纳车轮反演
美国国家航空航天局(NASA)和喷气推进实验室(JPL)的科研人员利用索杰纳火星车单轮旋转剪切土壤,根据库仑定律,对火星土壤的内聚力c和内摩擦角φ进行估测,进而判定该区域的可通过性。结果显示,在轨火星车周边火星表面的火星壤内摩擦角均值为35.0°,内聚力均值为0.01 kPa[56]。索杰纳火星车在火星表面行走了105 m,进行了14次关于火星壤力学的试验、6次空载电流标定和11次车轮磨损试验[57]。当车轮在无负载条件下,车轮扭矩M与车轮驱动电机的电流和电机温度呈线性关系[56-57]。

(21)
式中:M为扭矩,y为变量,I电机电流,x为电机无负载时的电机电流,t车轮驱动电机的温度。y和x均随着温度t的变化而改变。在火星表面,通过抬起火星车两个前轮和一个右边中轮,然后驱动抬起的车轮旋转,同时记录电机电流,该电流为无负载电机电流。
土壤的强度采用Mohr-Coulomb失效准则,建立正应力和剪切应力之间的关系:
S=c+Ntanφ
(22)
式中:S为剪切应力,N为正应力。
在分析过程中,建立后轮(正转)和前轮(逆转)的轮上载荷与剪切应力、火星车重量、车轮沉陷深度、悬架力臂和弹簧刚度数据之间的关系方程[57]。正应力通过估计的轮上载荷、火星重力加速度和车轮在火星表面的投影面积估算,剪切应力通过车轮扭矩、车轮半径和车轮投影面积估算。车轮投影面积通过车轮的宽度和车轮沉陷深度位置对应的弦长计算。应用最小二乘法和Mohr-Coulomb失效准则,对剪切应力和正应力数据对进行拟合,计算内聚力和内摩擦角。
在探路者号登陆火星后的第13火星日,在火星表面“Yogi”附近,索杰纳进行右后轮试验,车轮沉陷深度为1.3 cm,得到内聚力和内摩擦角分别为0.06 kPa和40.9°[57]。根据试验结果,“cloddy deposits”类型火星壤的内聚力和内摩擦角的平均值分别为0.17±0.18 kPa和37.0°±2.6°。
4.2 基于MER车轮的反演
勇气号和机遇号(Mars Exploration Rovers, MER)也通过车轮与地面的相互作用,进行了7次挖掘试验和20次刮擦试验,对古谢夫坑(Gusev Crater)和梅里迪亚尼平原(Meridiani Planum)进行了火星壤的内聚力和内摩擦角的估算,其中对内聚力的估算采用电机功的比例模型和轮缘剪切应力模型[58-60]。进行车轮挖掘和刮擦试验时,应用电机电流、电压和车轮持续于土壤相互作用的运行时间计算电机所做的功[58]。计算内摩擦角时,假定内聚力为零,则内摩擦角仅与车轮的正应力和剪切应力有关,因此可得
φ=arctan((A·V·t)/(RθFN))
(23)
式中:θ为车轮挖掘旋转角度(rad),实验时前车轮顺时针旋转。电机做功需要减去电机内耗。车轮每旋转60°(30个数据点),计算一次内摩擦角,然后计算平均值,R为车轮半径R=0.125 m,FN为法向力。
内聚力的计算有两种方法,一种是电机功的比例模型(Ratios of electromechanical work),另一种是轮缘剪切应力模型(Modeling shear stress along the wheel rim),这两种方法都需要已知内摩擦角和接触面积。根据挖掘试验得出火星壤的内摩擦角30°~37°,内聚力的值为0~2 kPa。而根据车轮与地面的刮擦试验,得出火星壤的内聚力为0~11 kPa,不确定性的范围为±0.7~±3.9 kPa。
车轮挖掘的方法被用于在轨估计土壤的力学特性,但是其缺点是针对每个不同的方法都需要建立校正模型,并且结果误差大,而且应用车轮作为土壤力学测试的部件一旦出现沉陷等意外状况就会使火星车无法移动,严重威胁火星车的行驶通过性。另外用车轮旋转剪切火星壤的方法仅仅是在剪切应力最大的条件下获得,不能获取其它的地面力学参数,特别是承压力学参数。
5 结论与展望
应用轮壤作用模型,可以对火星车移动系统进行设计和优化提供理论支撑,还可以利用轮壤相互作用模型对火星壤的力学参数进行辨识。
通过不同的分析方法得到的土壤力学参数具有差异性,其准确性和适用性还需要进一步的试验验证。因此,针对我国火星探测计划的巡视探测器,开展整车与不同火星地表极端环境下的试验,找出适合探测任务并可评估整车在极端环境下的通过性的方法是一个重要的研究方向,还需要进行大量的基础性的研究工作。
另外,由于好奇号在火星地表运行过程中出现车轮磨损的情况,因此设计新型的具有一定刚度的弹性车轮,以适应苛刻的火星地表环境发挥最大的行驶性能,同时建立相适应的轮壤相互作用模型用于预测整车的通过性,也是地面力学领域中热门研究方向之一。
猜你喜欢
发明与创新·小学生(2021年11期)2021-12-24
检察风云(2021年10期)2021-07-28
快乐语文(2021年11期)2021-07-20
数学大王·低年级(2021年2期)2021-02-21
快乐语文(2020年36期)2021-01-14
求学·文科版(2019年3期)2019-03-30
小猕猴智力画刊(2018年7期)2018-08-08
中学生理科应试(2017年4期)2017-07-08
中学生天地(A版)(2016年5期)2016-05-14
发明与创新·中学生(2016年7期)2016-05-14