
多功能园林作业机推土作业仿真分析
2020-03-13 05:49任毛飞陈娟娟
林业机械与木工设备 2020年2期
, 任毛飞, 陈娟娟
(信阳农林学院,河南 信阳 464001)
多功能园林作业机是指可以完成一般园林绿化作业(如开沟、挖坑、修剪草坪、整地等)的一种新型作业机具,该机主要由滑移装载机衍生而来[1]。
1 多功能园林作业机三维模型建立
在园林绿化建设中,平整地面、装卸土壤沙石是最主要的作业内容,在此重点分析多功能园林作业机推土作业(包含铲、装、卸等基本作业环节)的作业特点[2-3]。多功能园林作业机安装推土铲后便可组成具有推土功能的作业机,用Pro/E 4.0对其建模得到如图1所示的三维模型。
推土铲的动作由铲斗液压缸和举升液压缸联动控制[4]。作业机推土作业时前端质量相对较大,为了保持稳定性,在作业机的后端安装柴油机及质量较大的部件。同时把举升液压缸的支撑点也安装在后轮的位置上,这样的布置更有利于车体工作时保持前后的平衡,同时也能起到稳定力矩的作用[5]。

图1 多功能园林作业机推土作业三维模型1.铲斗液压缸;2.工作动臂;3.推土铲;4.附件安装系统;5.举升液压缸;6.车体;7.四轮转向系统
2 多功能园林作业机推土作业仿真分析
多功能园林作业机工作装置的连杆机构是在装载机正转五杆机构的基础上加以改进设计,如图2所示。其主要是为了适应各种不同附件的作业特点,同时也兼顾了装载机铲、装、卸等基本要求。其附件快速安装装置相当于五杆机构中最短的连杆,这样连杆机构的主要特点如下:①掘起力比六杆机构小;②连杆的倍率系数难以设计成较大的值,因而转斗的油缸行程较大,尺寸较小[6];③卸载时,活塞杆容易与斗底碰撞,因而推土铲的结构形式需要相应设计。这种正转五杆机构结构简单,能满足多功能园林作业的基本需求,因而大多数多功能园林作业机均采取这种结构[7]。

图2 正转五杆机构1.连杆;2.铲斗;3.动臂;4.铲斗油缸
为了进一步验证园林作业机多功能作业的特性,在此利用运动学分析软件ADMAS分析作业机安装推土铲后,其铲土、装土、卸土一系列作业动作的基本性能,从而为多功能园林作业机在杆件设计及力学分析等方面提供参考。
建模前先启动ADAMS/View设置操作环境,设置好标准单位、重力加速度及存盘路径等,然后建立铲斗的截面图并拉伸,最后进行抽壳处理,完成铲斗作业模型的建立,如图3所示。通过结构点图标及几何工具箱里的创建板工具,创建动臂各部件,完成动臂前板、动臂后板以及动臂横轴、铲斗油缸、油缸活塞的建模并用布尔运算工具将动臂连为一体[8-9]。
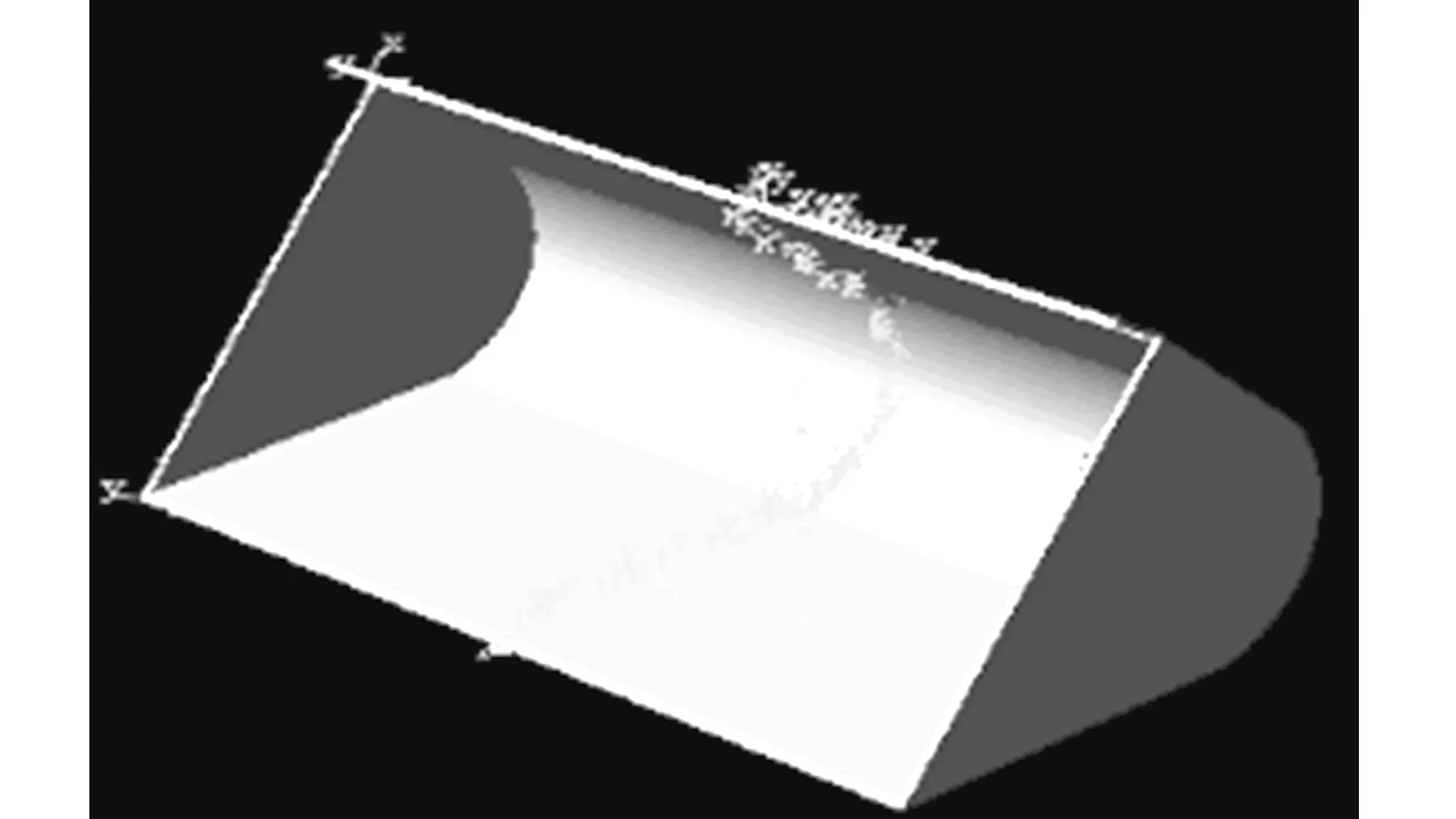
图3 铲斗三维模型
多功能园林作业机推土作业模型建立后在模型中添加约束,选择相应的设计点首先创建铲斗与动臂、动臂与车身等一共12个旋转副,创建铲斗油缸和铲斗活塞的圆柱副并在圆柱副上添加运动副。建模后整体效果如图4所示。
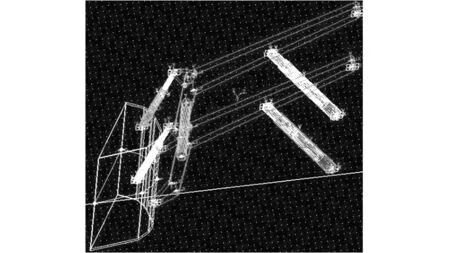
图4 建模后整体效果
相关部件的运动关系建立后利用step函数设置运动状况,step函数是在ADAMS中较为常用的函数之一,格式为step(x,x0,x1,h1)。现对其进行参数说明:
x—自变量,可以是时间或者时间函数;
x0—自变量的step函数开始值,可以是常数、函数表达式或者设计变量;
x1—自变量的step函数结束值,可以是常数、函数表达式或者设计变量;
h0—step函数初始值,可以是常数、函数表达式或者其他函数表达式;
h1—step函数最终值,可以是常数、函数表达式或者其他函数表达式。
确定运动函数后结合多功能园林作业机推土作业状况设定推土作业过程仿真时间,将推土作业分为以下几个步骤;① 铲斗翻斗——0~3 s;②工作间歇——3~4 s;③铲斗反转——4~5 s;④动臂举升——5~9 s;⑤卸料翻斗——9~10 s;⑥工作间歇——10~12 s;⑦动臂下降——12~20 s。
接下来将动臂油缸的运动function栏设置为:step(time,5,0,9,550)+step(time,12,0,20,-550);将铲斗油缸的运动function栏设置为:step(time,0,0,3,-80)+step(time,4,0,5,80)+step(time,9,0,10,-200)。然后点击仿真工具,设置end time为25 s,STEPs为1 000,点击启动图标进行仿真。
为了分析铲斗的运动状况,在铲斗的前端中间位置建立一个标记点,在仿真过程中该标记点的轨迹如图5所示。为便于分析,在此将轨迹图片加以处理,根据轨迹的变化形式及结合多功能园林作业机铲斗的作业情况将整个曲线分为4段。从轨迹曲线可以看出,作业机从0~1点开始向下铲土,这段时间是3 s,主要方式为铲斗的运动,其轨迹为0~1这段曲线;然后作业机开始铲土上升,从1位置到0位置,作业机将土铲持平,这个过程为多功能园林作业机的调姿阶段,轨迹与向下铲土轨迹重合;图中0~2这段曲线表示作业机稳步上升阶段,其大概轨迹为圆弧形,速度动荡不大,加速度动荡也不大,时间一直延续到9 s这一时刻。图中2~3段曲线为铲斗卸土动作阶段,此时动臂油缸基本不动,主要为铲斗油缸动作,其轨迹也大致为圆弧形,3~4段曲线为返回过程阶段,至此完成一个作业工作周期。整个曲线是在多功能园林作业机动臂油缸一端固定情况下(即作业机在原地作业无转弯和前进动作)的模拟仿真。

图5 标记点轨迹
标记点的位移、速度、平移加速度分析分别如图6、图7、图8所示,这三个图是将X方向和Y方向的总位移、速度、平移加速度结合起来(无Z方向,因为在Z方向各个值均为0),从这些分析图中可以看出各个阶段标记点的运动状况,从而反映整个铲斗的工作过程,为以后铲斗的工作性能分析,如工作是否平稳、工作行程是否合理,以及有无干涉等方面提供重要的参考依据。

图6 标记点位移分析

图7 标记点速度分析
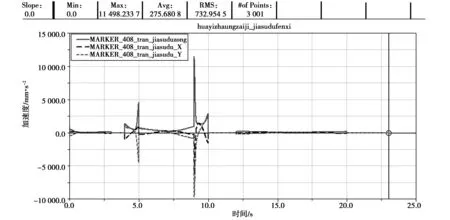
图8 标记点平移加速度分析
从标记点位移、速度、平移加速度的分析图可知:标记点的位移,X方向的位移变换较小,说明铲斗的作业幅度不大,基本在圆弧范围内动作。Y方向的位移变换为2 100 mm左右,符合常用多功能作业机的基本俯仰范围,但相比较大的装载机其俯仰范围要小。同时由于该仿真是动臂油缸固定在地面上,step函数也没有按照最大范围设计,所以仿真结果比实际(实际的范围大约是2 600 mm)要小。而总的位移为X方向位移平方加上Y方向位移平方的平方根,所以一直为正值。
标记点的速度经历了几个变换区域,其区域的划分与图中标记点的轨迹相对应。速度在铲土和卸载时达到最大,在该时刻加速度也达到最大,其他时刻加速度基本为0,说明这些时刻工作较为平稳。在铲土和下载时因为推土铲的受力方式急剧变化,同时推土铲内物料的重量也急剧变化,所以这段时间推土铲不仅对铲斗油缸和动臂油缸有冲击,而且对整个车体也有冲击。
3 结束语
通过建立三维模型,分析了多功能园林作业机推土作业的工作过程。重点分析了工作臂的运动形式,利用了ADAMS软件的仿真功能,建立了作业机工作装置的仿真模型。结合推土作业铲、装、卸的作业特点,通过建立标记点记录了该点位移、速度、平移加速度的变化,利用step函数得到作业铲的总体作业情况。对多功能园林作业机的关键部件工作动臂进行了应力应变分析,得出其最大应力区域,为工作动臂的设计提供了参考。
猜你喜欢
冶金设备(2020年2期)2020-12-28
科学技术创新(2020年32期)2020-11-05
消费导刊(2020年1期)2020-07-12
学生天地·小学低年级版(2019年10期)2019-12-30
家教世界·创新阅读(2019年11期)2019-12-10
学生天地(2019年28期)2019-08-25
作文与考试·小学低年级版(2019年7期)2019-04-17
纤维复合材料(2018年2期)2018-12-07
建筑机械(2018年11期)2018-11-22
机械制造(2018年3期)2018-07-25
