轨道静检相对测量中长波计算方法的修正
2020-03-16 12:46熊丽娟朱洪涛吴维军魏晖曹娟华
铁道科学与工程学报 2020年2期
熊丽娟,朱洪涛,吴维军,魏晖,曹娟华
轨道静检相对测量中长波计算方法的修正
熊丽娟1, 2,朱洪涛1,吴维军1,魏晖3,曹娟华1
(1. 南昌大学 机电工程学院,江西 南昌 330031;2. 南昌航空大学 航空制造工程学院,江西 南昌 330063;3. 江西科技学院 汽车工程学院,江西 南昌 330098)
轨道静检中的长波测量是铁路平顺性检测中非常关键的一环。现行的长波相对测量法为一测回法,其所作的长波计算是基于轨检仪的角速度积分而作,而非真正的平面曲线转角和竖曲线转角。为获取此2转角,必须计算轨检仪推行经过各测点的姿态角,其中真方位角的增量即为平面曲线转角,而坡度角增量即竖曲线转角。本文使用多子样旋转矢量法以获取轨检仪推行过程中的实时姿态角,并修正原长波计算中小弦测值算法。线上实验表明,修正后一测回法的长波测值与原一测回法所测值在曲线半径较小时差异非常大,但即使在一般高铁曲线半径之下,其高低差异亦不容忽视。本文提出的修正方法对于现行的长波相对测量非常必要,能大大提高其测量精度。
长波;一测回法;姿态角;多子样旋转矢量法;小弦测值

我国铁路近年来的不断提速对轨道质量提出了更高的要求,也对轨道不平顺检测精度提出了更严苛的要求。因为轨道不平顺正是轨道质量状态的体现,影响着列车运行安全与乘坐舒适性[1]。轨道不平顺按有无轮载作用分为静态和动态不平顺[2]。前者主要反映轨道部分不平顺,后者则是轨道和轨下结构状态的综合反映,两者并不存在一一对应的函数关系[3]。作为工务养修作业的直接依据,静态测量结果殊为重要[4]。静检设备常为轻型轨检小 车[2],其中作相对测量[5]者称为轨检仪,作绝对测量[5]者称为轨道测量仪;动检设备一般为大型轨检车或安装于运营车辆上作在线检测[6]。世界各国测量高低、轨向不平顺的方法主要有弦测法和惯性基准法2类。弦测法中的三点中弦法(又称正矢法)为目前国内外大多数轨检仪采用。而惯性基准法中只有质量弹簧系统加速度积分与位移相加法为国内外轨检车普遍采用,成为实用化的“惯性基准法”。理论上该法可测出任意波长的轨道不平顺,但为了滤除无需测量的频率极低、变化缓慢、数值很大的轨道变化,须引入高通滤波器;并且需对由于车体倾斜、侧滚而使加速度计产生的相应输出进行修正,才能得到精度较高的结果[2]。随着列车运行速度提高,以往对列车轮轨动力作用影响不明显的长波不平顺(波长30~200 m)逐渐成为影响高速列车运行安全性、平稳性和舒适性的主要因素[7]。高速列车车体主振频率多在1 Hz左右[8],当列车速度为250 km/h时,最不利波长约为70 m。目前国内外已对中短波轨道不平顺进行了大量的研究,但对长波不平顺的相关问题的研究却有所欠缺[9−10]。将近年来有关轨道长波不平顺检测的研究按动检和静检分类发现,前者大多仍是采用惯性基准法,而后者则依然是以弦测法为基础。动检类研究有:郑树彬等[11]基于惯性测量原理提出于动检中获取加速度、隙距和速度信号进行积分、滤波以提取长波信息;陆珠兴等[12]亦是从加速度信号中提取轨道长波不平顺特征;盛文娟等[13]针对动检获得的加速度信号用分数傅里叶变换分析长波不平顺;朱文发等[14]提出可基于捷联惯性系统进行轨道长波不平顺检测,但未给出具体实施方法和实验结果;邢宗义 等[6]提出基于构架点头角速度的轨道垂向长波不平顺在线检测方法;HUANG等[15]提出将惯性基准法采集信号进行滤波、积分等环节得到所需波长不平顺的方法。这些研究的重心大多是在信号滤波上,鲜少见研究加速度计因车体倾斜、侧滚而产生的测量误差。静检类研究有:魏晖等[4]提出用相对测量代替绝对测量的长波不平顺快速测量法;李阳腾龙等[16]批判德铁30 m弦和300 m弦中长波平顺指标,提出高密度四点偏差约束轨道方向高低模型;张明等[17]提出用工业相机采集激光靶面图像,利用图像处理技术提取激光光斑中心坐标的长波不平顺激光检测方法;王源等[18]对轨道不平顺多点弦测法进行了误差分析。由于静态长波不平顺的绝对测量或激光检测法测量效率和测点密度较相对测量低很多,且其精度对环境及操作准确性的依赖较强[19],故目前倾向于用轨检仪测取静态长波高低与轨向值。不失一般性,下文将以70 m长波高低和轨向的相对测量作为研究对象。目前较高精度的长波相对测量法主要为一测回法,即在同一段线路上往返推,以消除顺里程与逆里程测量时的共同误差[20]。由于在现行一测回法中,长波是基于轨检仪角速度积分而非实际曲线转角计算,故其精度尚有待提高。为此,本文研究了解算实际曲线转角的方法,修正了长波计算中的小弦测值算法,以提高一测回法的长波测量精度。
1 长波数据具体测量方法
无论静态测量采用何种测量技术路线,其测量结果常常会以“特定弦长的矢距”,即弦测法形式来表达[3]。一般说来,关注何种波长的不平顺即测量何种弦长的中点弦测值(即“中点矢距”)。

图1 70 m长波轨向值示意图
具体说来,某测点的70 m长波轨向,指的是该点在轨道平面曲线上的70 m弦中点弦测值,如图1所示;而其70 m长波高低值,则是该点在轨道竖曲线上的70 m弦中点弦测值。
相对测量时,轨检仪可直接测得其在相邻测点间行走的角速度积分,其推行示意图如图2所示——轨检仪外廓呈T形,横梁与铁轨正交,侧臂置于右轨上[20]。为测得轨向和高低,其横梁与侧臂交叉处正交配置有2个单轴光纤陀螺仪(FOG)[20]:轨向FOG的盘面平行于轨道面,敏感轴垂直该面向下;高低FOG盘面垂直于轨道面,敏感轴平行该面从左轨指向右轨[20]。现行一测回法就是用这2个FOG分别进行载体坐标系(O−bbb)下b与b2轴向角速度的测量,并把这2个角速度积分近似当作平面曲线和竖曲线转角进行长波计算。
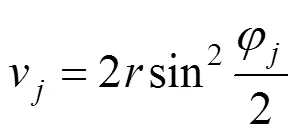
一测回法的70 m长波计算公式是根据“以小推大”公式推得[21],因此需先算小弦测值,才能计算大弦测值(即70 m弦测值)。因本文以江西日月明测控科技股份有限公司的轨检仪作为实验用机,采样密度为每0.125 m一个测点,故其长波计算的小弦测值为0.25 m弦的中点弦测值。现行小弦测值计算公式如下:
式中:v为测点的0.25 m弦测值,φ(rad)为测点-1到测点的曲线转角,如图3所示。
使用式(1)进行“以小推大”所得的70 m长波计算公式如下:


式中参数如图4所示[20]。

图2 轨检仪示意图
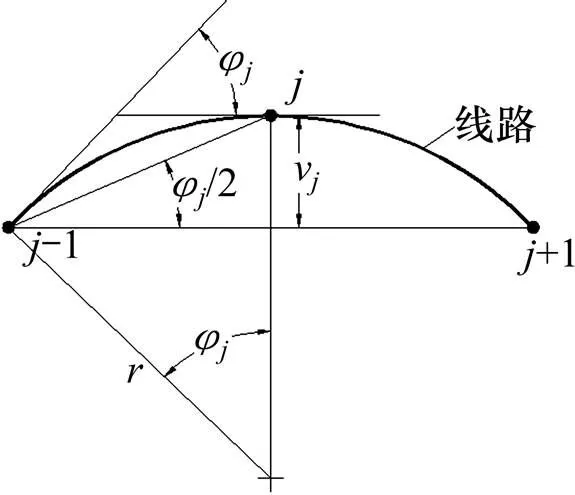
图3 现行小弦测值求解方法示意图
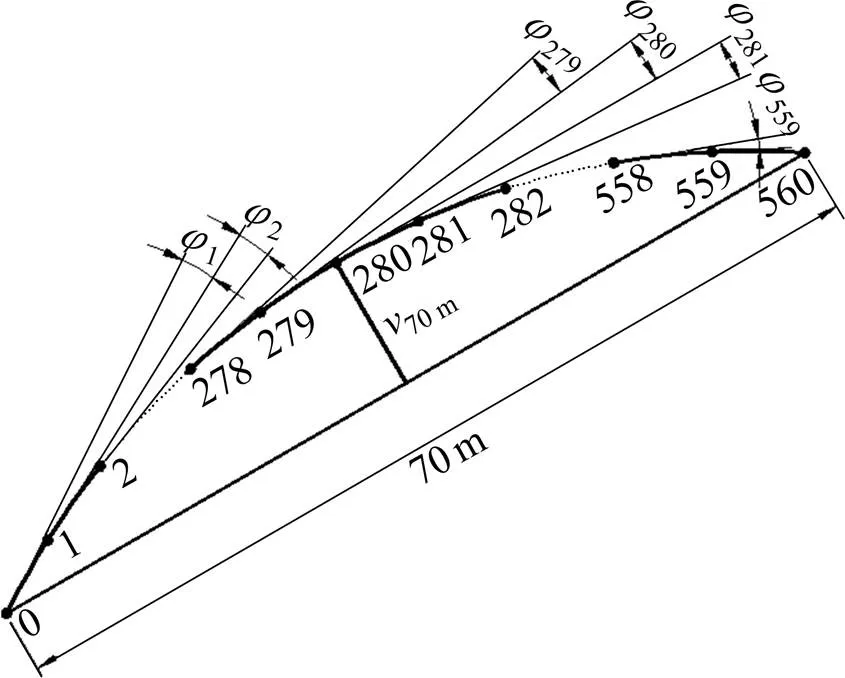
图4 “以小推大”求解70 m长波示意图
2 用角速度积分求解长波的弊端
现行一测回法将轨向和高低FOG输出的角速度积分近似当作实际轨道平面曲线和竖曲线上转角进行长波轨向和高低计算——这种近似缘于多数轨道平面都呈近似水平状态。因此,测量时为了方便常将轨向FOG敏感轴视作总铅垂向下,而将高低FOG敏感轴视作总是水平方向。
但在轨检仪推行过程中,轨向和高低2个FOG的敏感轴方向其实一直在变。将不同方向的角速度积分相加,所得量虽具有角度量纲,但一般情况下并无明确物理意义。

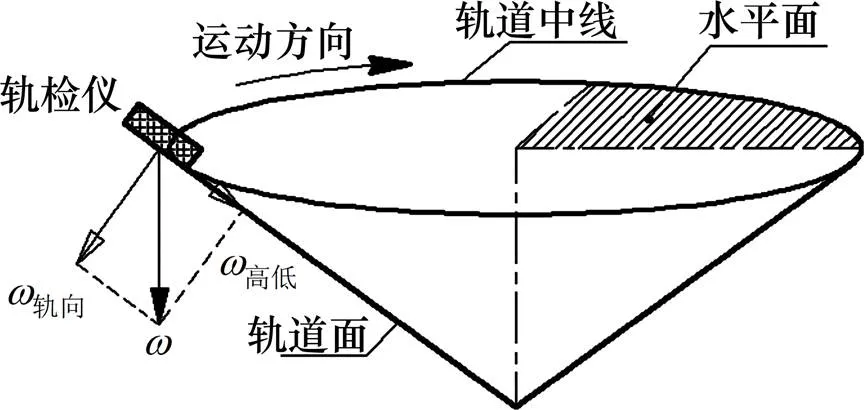
图5 轨检仪圆曲线上匀速推行图示
现行一测回法的这一近似做法可能给长波测量带来不可忽视的误差,尤其是在圆曲半径较小的情况下。它对短波精度的影响几可忽略,是因为在10~20 m线路范围内,FOG敏感轴方向的变化确实很小,但在70~120 m范围内,敏感轴方向的变化常常是难以忽略的。
实际轨道平面曲线的转角为轨检仪方位角增量,竖曲线转角为轨检仪坡度角增量。因此要进行准确的长波计算,需先测得轨检仪实时姿态角。
3 姿态角求解方法
姿态角的求解至少需测量载体3个维度上的角速度,如图2中轨检仪b,b和b三轴上的角速度。但在日月明公司所生产轨检仪上,b向的角速度并未配备FOG测量。由于该轨检仪3个姿态角——真方位角、坡度角和超高倾角(如图6所示[20])之中,系直接由倾角传感器测得,故使用姿态角4阶龙格库塔算法推导得出,b轴的角速度积分可如下求解:
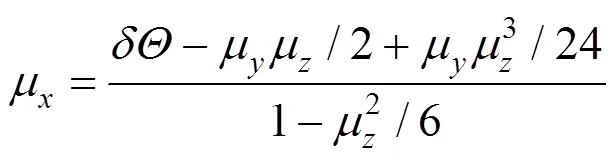
式中:μy和μz是相邻测点间yb和zb轴的角速度积分,为相邻点间超高倾角增量。
求得相邻测点间轨检仪的对地角速度积分=[μ,μ,μ]T后,即可使用多子样旋转矢量法根据每小段角速度积分(=1, 2, 3, …)进行姿态角求解。虽然多子样旋转矢量法原本是将姿态更新时间间隔等分来获取子样,但其本意是要每个小区间的子样间差异不过大,故此处将时域等分广义化为路程等分,将每小段线路的角速度积分作为子样。
轨检仪姿态角具体算法如图7所示,主要使用四子样旋转矢量优化算法(RV4),个别地方(即前3个测点)使用单子样(RV1)、双子样(RV2)和三子样旋转矢量算法(RV3)。
目前,多子样旋转矢量姿态算法方面的文献其实有很多,除四子样经典优化算法外,还有五子 样[22]、六子样[23]甚至八子样优化算法[24]。但通过实验比较发现,五子样、六子样优化算法在长波测量中的使用效果并不比经典RV4算法[25]更好,故此仍主要使用RV4算法进行轨检仪姿态计算。
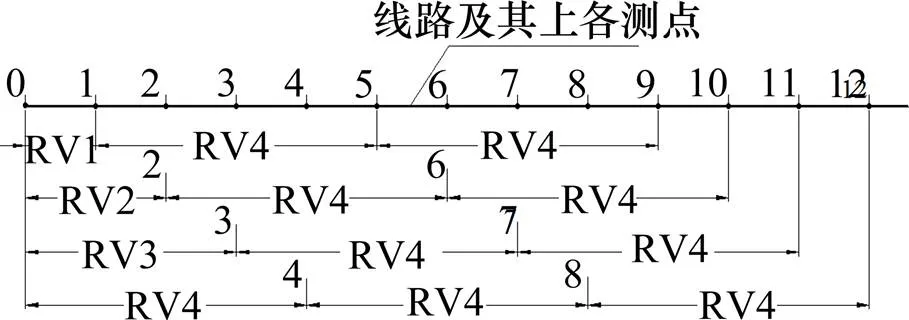
图7 各测点姿态角算法示意图
求得轨检仪在每个测点的方位角与坡度角后,其相邻测点间的方位角增量即为实际平面曲线转角,而坡度角增量即为实际竖曲线转角。
4 小弦测值算法的修正
“以小推大”公式原本如下:

式中:70 m(i)指第个测点处的70 m长波值;v指第个测点的0.25 m弦测值。
现行小弦测值v的算法,即式(1),是基于测点前一小段和后一小段曲率半径相同、转角相同的假设而来,如图3所示。但如果遇到图8所示情况,该算法的误差就较大了——因为此时φ为0,若按式(1)计算,小弦测值v即为0,这显然并非事实。可见,欲求0.25 m弦测值,不能只使用其中0.125 m的转角,将前后0.125 m的转角联合起来使用才更符合实际。
另外,即使情况如图3所示,式(1)也依然是简化后的结果,实际小弦测值
式(5)中:为线路局部曲率半径。由于一般情况下φ相当小,才将sin2(φ/2)近似为φ2/4,得到式(1)。但如果测量时错将转角φ测得过大,那这近似误差就大了。对比式(1)和式(5),φ如果测错,那么式(5)中的sin(φ/2)将限制其值不大于1,式(1)却会因为没有正弦函数的约束,令v误差随φ误差的增加而不断增加。当然,因为测量时并不知道局部曲率半径,式(5)不方便使用;若把=125/φ代入,则又难以控制φ测量不稳定可能带来的粗大误差。几经比较,最终决定将式(5)近似如下:
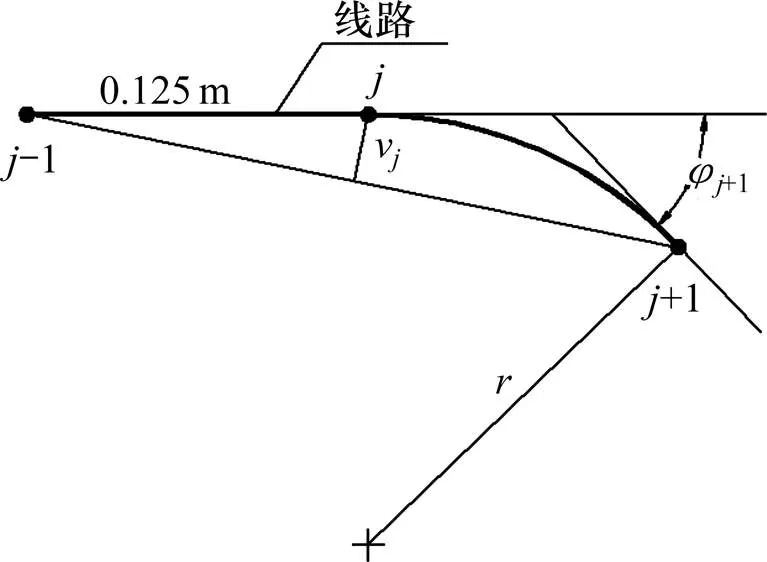
图8 小弦测值可能情况示意图
在式(6)的基础上,考虑测点后0.125 m转角φ+1对v的影响,将小弦测值计算公式修正为:

不难推出,图8中测点处的实际小弦测值为:

式中:单位为m,φ+1=0.125/。
表1针对图8所示情况给出了不同曲率半径下原小弦测值算法的误差、修正后小弦测值算法的误差以及2种算法可能引起的70 m长波测量误差。显然,修正后算法可能引起的70 m长波误差可以忽略不计(70 m长波允许测量误差为3 mm[20]),而原算法可能引起的70 m长波误差在曲率变化率为1/320 km/0.125 m时(轨道上非常可能出现的情况)依然有近1 mm。

表1 图8情况下小弦测值算法修正前后误差比较
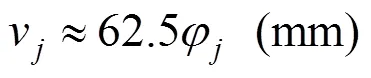
将式(7)代入式(4)整理得到修正后的长波计算公式为:


式中:70 m(i)的单位为mm。
5 实验结果
在一测回法中,使用上述方法获得姿态角增量,并用该增量作为转角φ,按照式(9)进行长波计算——此法本文称之为“修正后的一测回法”。
分别使用修正后的一测回法和原一测回法在普速铁路和高速铁路上实验。
所选普速铁路实验线路包含一完整的单曲线于其中,其资料如下:曲线半径为800 m,右转7°1′ 7.44″,缓和曲线长50 m,曲线总长148 m,超高75 mm,直缓点里程0.025 km。该线路上的实验结果如图9所示。
图9中第1幅图是70 m长波设计值,其高低范围在[−15.47, 25.06],轨向范围在[235.24,760.08];第2幅图是原一测回法测出的70 m长波,高低范围在[−69.48,57.51],轨向范围在[277.46,834.02];第3幅图是修正后一测回法测得的70 m长波,高低范围在[−46.46,74.58],轨向范围在[277.75,836.00]。长波轨向实测值和设计值的差异高达100 mm以上,可见该段实验线路状况很不良好,实际上这也确实是段年久失修专用于实验的老线路。在这段线路上,原一测回法与修正后的一测回法之间差异巨大。由图9中的第4幅图可知,其高低差范围在[−39.15,−5.02],轨向差范围在[−2.45,3.64],可见原一测回法的误差主要表现在其长波高低值。

图9 普速实验线路上一测回法修正前后实验结果比较
原一测回法在状况不良的普速线路上误差巨大。所选高速铁路实验线路为新建成的昆玉客专正线上的一段,亦包含一完整单曲线于其中,资料如下:曲线半径4 504.548 m,右转7°2′ 22.5″,缓和曲线长180 m,曲线总长733.446 m,超高45 mm,直缓点里程42.904 727 km。该线路上的实验结果如图10所示。
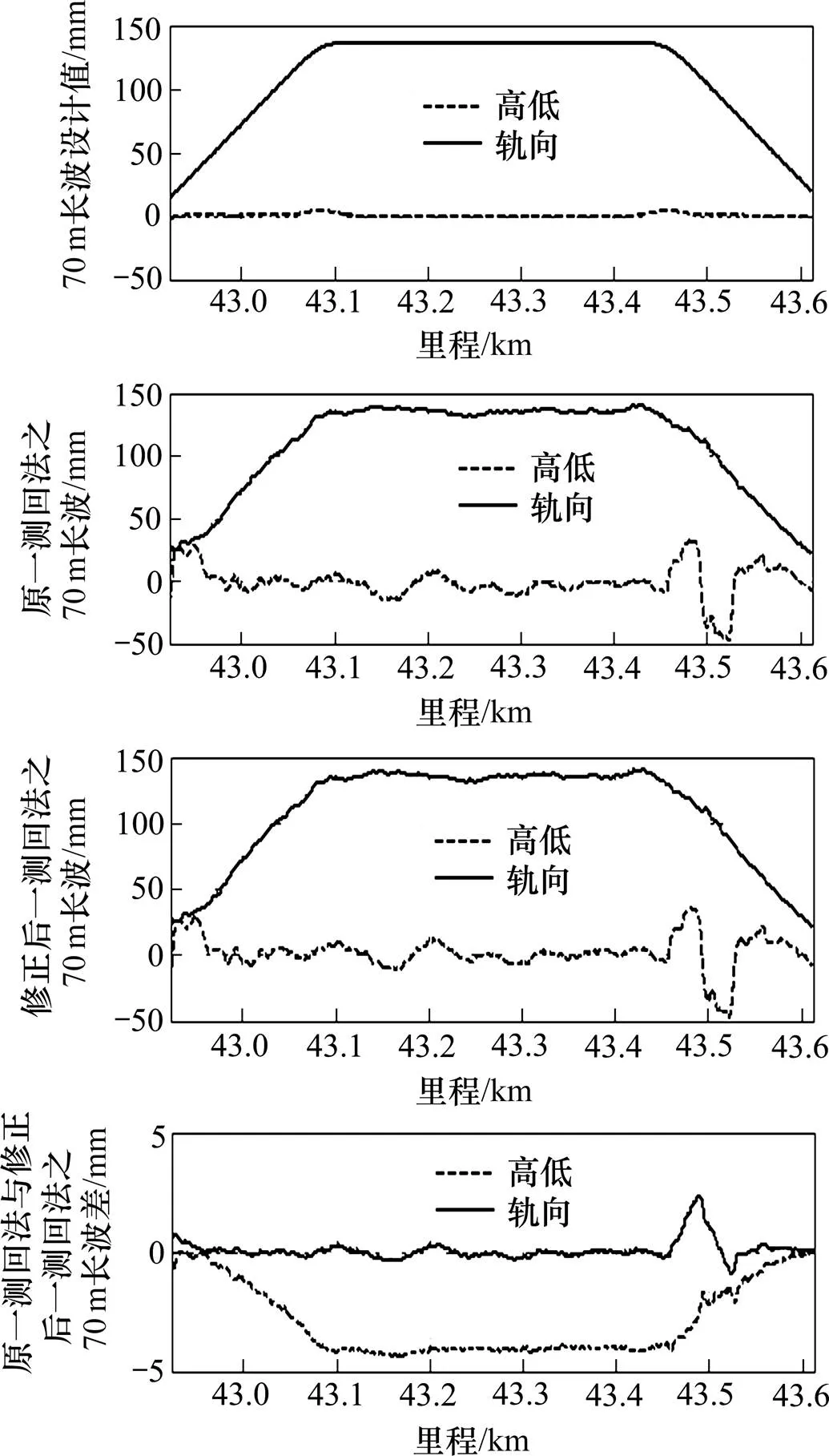
图10 高速实验线路上一测回法修正前后实验结果比较
图10中,第1到第3幅图的高低和轨向范围分别如下:
[−2.00, 4.35],[14.02, 135.97];
[−48.91, 32.04],[20.64, 140.95];
[−47.33, 35.17],[19.95, 140.86]。
需说明的是,现在的高速线路一般为S型顺坡,但由于缺乏S型顺坡的相关数据,图10中的高低设计值依然是基于直线顺坡的假设而算得,故长波高低设计值与实测值看上去差异甚著。从长波轨向设计值与实测值差异只有几毫米看,该高速实验线路的状况要远好于上述普速实验线路。
图10中第4幅图的高低和轨向差范围分别为[−4.40,0.0457]和[−0.966,2.33],这表明即使在状况良好的高速线路上,原一测回法的误差仍主要出现在长波高低值上。虽然该高低误差较普速线路上的误差已大大减小,但其大范围近4.4 mm的误差依然是长波测量中不可容忍的。由此不难推知,在一般情况下,曲线半径越小则原一测回法的长波测量误差越大。
图10中第4幅图还显示,原一测回法长波轨向的误差相对高低小很多,只是在43.5 km处由于高低振荡幅值较大,连带影响了长波轨向的测量,使其出现2.33 mm的较大误差。可见,虽然原一测回法的误差主要出现在长波高低的测量上,但当线路状况较差时,连带长波轨向的测量也会出现不可忽视的误差。
综上所述,对现行一测回法进行上述修正对长波测量而言是必须的,能大幅提升其测量精度。
6 结论
1) 介绍了现行的长波相对测量方法——一测回法,并分析其使用角速度积分进行长波计算的弊病所在以及原小弦测值算法可能导致的误差,提出应使用姿态角增量进行长波计算并修正小弦测值算法。
2) 提出了在所使用轨检仪现有条件(2个FOG加一个倾角传感器)下的具体姿态角算法。
3) 修正了长波计算中的小弦测值算法,尽可能地减小了长波测量误差。
4) 展示了普速线路和高速线路上一测回法修正前后的实验结果,证明修正前后的长波测量结果差异很大,超出长波允许测量误差3 mm,尤其是在状况不良线路上。因此,本文对现有长波相对测量方法所作的修正非常必要。
5) 除了用于一测回法,本文的修正方法亦可用于相对测量中的半测回法。
[1] 冯超, 余朝刚, 孙雷, 等. 基于改进GM(1,1)与WOA- LSSVM组合预测模型的轨道不平顺预测[J]. 铁道标准设计, 2019(4): 34−39, 46. FENG Chao, YU Chaogang, SUN Lei, et al. Prediction of track irregularity based on improved GM(1,1) and WOA- LSSVM combination model[J]. Railway Standard Design, 2019(4): 34−39, 46.
[2] 罗林, 张格明, 吴旺青, 等. 轮轨系统轨道平顺状态的控制[M]. 北京: 中国铁道出版社, 2006. LUO Lin, ZHANG Geming, WU Wangqing, et al. Control of track smooth state of wheel rail system[M]. Beijing: China Railway Press, 2006.
[3] 魏晖. 高速铁路轨道平顺性静态检测理论与精调技术研究[D]. 南昌: 南昌大学, 2014. WEI Hui. Research on the track irregularities survey theory and relevant adjustment technologies of HSR track[D]. Nanchang: Nanchang University, 2014.
[4] 魏晖, 朱洪涛, 殷华, 等. 高铁轨道平顺性的150 m/ 300 m校验及其快速测量[J]. 铁道工程学报, 2015, 32(1): 44−48, 54. WEI Hui, ZHU Hongtao, YIN Hua, et al. 150 m/300 m check for the irregularities of HSR and its rapid survey[J]. Journal of Railway Engineering Society, 2015, 32(1): 44−48, 54.
[5] TB/T 3147—2012, 铁路轨道检查仪[S]. TB/T 3147—2012, Inspecting instrument for static geometry parameter of track[S].
[6] 邢宗义, 陈岳剑, 王晓浩, 等. 基于构架点头角速度的轨道垂向长波不平顺在线检测[J]. 中国铁道科学, 2015, 36(4): 32−39.XING Zongyi, CHEN Yuejian, WANG Xiaohao, et al. On-line detection of vertical long wavelength track irregularities using bogie pitch rate[J]. China Railway Science, 2015, 36(4): 32−39.
[7] WANG Z, SONG Y, GUO G. Study on allowable safety speed criterion of long wave track irregularity of high-speed railway[J]. Journal of Residuals Science & Technology, 2016, 13(7): 175.1−175.4.
[8] Hung C F, Hsu W L. Influence of long-wavelength track irregularities on the motion of a high-speed train[J]. Vehicle System Dynamics, 2018, 56(1): 95−112.
[9] 吴晓峰. 杭长高铁长波高低不平顺问题的研究与分析[J]. 上海铁道科技, 2015(3): 8−9, 19. WU Xiaofeng. Research and analysis on the long wave height irregularity of Hangchang high speed railway[J]. Shanghai Railway Science & Technology, 2015(3): 8−9, 19.
[10] XIN Tao, WANG Pengsong, DING Yu. Effect of long- wavelength track irregularities on vehicle dynamic responses[J]. Shock and Vibration, 2019, 2019: 1−11.
[11] ZHENG Shubin, LIN Jianhui, LIN Guobin. Long-wave irregularity detection of high-speed maglev track[C]// 2007 8th International Conference on Electronic Measurement and Instruments, August 16-July 18, 2007. Xian, China. New York, USA: IEEE, 2007.
[12] 陆珠兴, 苏燕辰, 李华超. 轨道长波不平顺检测系统设计[J]. 中国测试技术, 2007, 33(2): 16−18, 56. LU Zhuxing, SU Yanchen, LI Huachao. Designing of long wave track irregularity inspection system[J]. China Measurement Technology, 2007, 33(2): 16−18, 56.
[13] SHENG Wenjuan, GUO Aihuang. Analysis of track long-wave irregularity with fractional Fourier transform[C]// 2009 5th International Conference on Wireless Communications, Networking and Mobile Computing, September 24−26, 2009. Beijing, China. New York, USA: IEEE, 2009.
[14] 朱文发, 柴晓冬, 郑树彬, 等. 基于捷联惯性系统的轨道长波不平顺检测[J]. 城市轨道交通研究, 2012, 15(11): 87−90. ZHU Wenfa, CHAI Xiaodong, ZHENG Shubin, et al. Detection of track long-wave irregularity based on SINS[J]. Urban Mass Transit, 2012, 15(11): 87−90.
[15] HUANG Jingyu, WU Zhewei, SHI Jin, et al. Influence of track irregularities in high-speed Maglev transportation systems[J]. Smart Structures and Systems, 2018, 21(5): 571−582.
[16] 李阳腾龙, 岑敏仪, 马国治. 高速铁路轨道中长波不平顺检测模型研究[J]. 铁道学报, 2017, 39(2): 112−118. LI Yangtenglong, CEN Minyi, MA Guozhi. Study on a novel inspection model of middle and long wave irregularities of track in high-speed railways[J]. Journal of the China Railway Society, 2017, 39(2): 112−118.
[17] 张明. 图像处理技术在轨道平顺度检测中的应用研究[J]. 铁路计算机应用, 2017, 26(6): 7−10. ZHANG Ming. Application of image processing technology in detection of track flatness and smoothness [J]. Railway Computer Application, 2017, 26(6): 7−10.
[18] WANG Yuan, TANG Huiyue, WANG Ping, et al. Multipoint chord reference system for track irregularity: Part II−Numerical analysis[J]. Measurement, 2019, 138: 194−205.
[19] 熊丽娟, 朱洪涛, 魏晖, 等. 基于轨道相对测量数据识别曲线关键参数的研究[J]. 铁道学报, 2018, 40(4): 127−134. XIONG Lijuan, ZHU Hongtao, WEI Hui, et al. Research on curve key-parameter identification based upon track relative survey data[J]. Journal of the China Railway Society, 2018, 40(4): 127−134.
[20] 熊丽娟, 朱洪涛, 王志勇, 等. 轨道长波不平顺半测回法测量精度的研究(Ⅰ)[J]. 铁道学报, 2019, 41(6): 130− 136. XIONG Lijuan, ZHU Hongtao, WANG Zhiyong, et al. Study on improving accuracy of track long-wave irregularity measured by semi-observation method(Ⅰ)[J]. Journal of the China Railway Society, 2019, 41(6): 130− 136.
[21] 朱洪涛, 魏晖, 王志勇, 等. 轨检仪弦测法“以小推大”检查轨道轨向不平顺的理论研究[J]. 铁道学报, 2007, 29(1): 36−40. ZHU Hongtao, WEI Hui, WANG Zhiyong, et al. Discussion on inspection of track alignment irregularities according to method of chord measuring and its “Using small fetch big”[J]. Journal of the China Railway Society, 2007, 29(1): 36−40.
[22] 靳聪, 赵修斌, 许云达, 等. 捷联姿态解算五子样等效旋转矢量算法研究[J]. 科学技术与工程, 2014, 14(29): 96−99. JIN Cong, ZHAO Xiubin, XU Yunda, et al. Research on five-sample algorithm for attitude updating of SINS[J]. Science Technology and Engineering, 2014, 14(29): 96−99.
[23] 何矞, 任凯升, 南英. 捷联惯导姿态更新的六子样旋转矢量优化算法研究[J]. 南昌航空大学学报(自然科学版), 2008, 22(2): 35−38. HE Yu, REN Kaisheng, NAN Ying. Research on optimal six-sample rotation vector algorithms for SINS attitude updating[J]. Journal of Nanchang Hangkong University (Natural Science), 2008, 22(2): 35−38.
[24] LI Lianpeng, XIE Lun, SU Zhong. Research on optimal eight-sample rotation vector algorithm for SINS attitude updating[J]. Journal Computers, 2018, 29(2): 136−144.
[25] Jang G Lee, John G Mark, Daniel A Tazartes, et al. Extension of strapdown attitude algorithm for high- frequency base motion[J]. Journal of Guidance Control and Dynamics, 1988, 13(4): 738−743.
Correction of the long-wave calculation method in relative measurement of track static inspection
XIONG Lijuan1, 2, ZHU Hongtao1, WU Weijun1, WEI Hui3, CAO Juanhua1
(1. School of Electromechanical Engineering, Nanchang University, Nanchang 330031, China; 2. School of Aeronautical Manufacturing Engineering, Nanchang Hangkong University, Nanchang 330063, China;3. School of Automotive Engineering, Jiangxi University of Technology, Nanchang 330098, China)
Long-wave measurement in track static inspection is a very critical part for the test of railway smoothness. The current long-wave relative measurement method is purely observation method, of which the long-wave calculation is based on the angular velocity integral of the track detector, rather than the true plane curve turn-angle and vertical curve turn-angle. In order to obtain the two types of turn-angles, it is necessary to calculate the attitude angles of the track detector through each measuring point, wherein the increment of true azimuth is the plane curve turn-angle, and the increment of slope angle is the vertical curve one. In this paper, the multi-subsample rotation vector method was used to obtain the real-time attitude angles during the application of the track detector, while the small-chord versine algorithm in the original long-wave calculation was modified. The railway experiments show that the long-wave measured by the modified full-observation method is very different from the value measured by the original full-observation method when the curve radius is small, but even under the general high-speed curve radius, the difference between their longitudinal long-wave values cannot be ignored. Therefore, the correction method proposed in this paper is very necessary for the current long-wave relative measurement, and would greatly improve the long-wave measurement accuracy.
long-wave; full-observation method; attitude angles; multi-subsample rotation vector method; small-chord versine
U216.3
A
1672 − 7029(2020)02 − 0326 − 09
10.19713/j.cnki.43−1423/u.T20190307
2019−04−15
国家自然科学基金资助项目(51468042);江西省重点研发计划项目(20161BBE50079)
朱洪涛(1962−),男,湖南双峰人,教授,从事铁道检测技术研究;E−mail:honey62@163.com
(编辑 涂鹏)
猜你喜欢
汽车工程师(2021年12期)2022-01-17
中学生数理化·七年级数学人教版(2021年9期)2021-11-20
模具制造(2019年10期)2020-01-06
今日农业(2019年12期)2019-08-15
数字技术与应用(2017年8期)2017-10-30
红旗文稿(2016年7期)2016-05-13
探测与控制学报(2015年4期)2015-12-15
民用飞机设计与研究(2015年3期)2015-12-07
汽车与新动力(2012年5期)2012-03-25
cookie world(2010年5期)2010-06-10