
新型高效智能便携式梨果采摘装置的研制
2020-03-26 11:53衢州职业技术学院王胜巫少龙周明安刘文军
河北农机 2020年2期
衢州职业技术学院 王胜 巫少龙 周明安 刘文军
引言
目前对于智能控制技术、嵌入式控制技术、计算机虚拟仿真技术等应用于农业生产中的起步还稍晚,但是通过近几年行内专家学者的研究与创新取得了一定的可借鉴的技术标准及实施方案,部分研究成果已经达到国内较为先进水平,但也存在一些不全面性和创新性不足的问题,这些研究为本项目的开展提供了保证和借鉴。
南京工业大学孙承平等[1]设计了采摘机器人视觉测量与避障控制系统。该系统具有较强的识别功能,但未能在模拟实践中进行系统的实验,实用性和推广性有待考量。华南农业大学熊俊涛等[2]研究了荔枝、柑橘的视觉识别定位方法,以及机械手的行为控制方法,进行了荔枝、柑橘的采摘作业试验,该款机器人制作成本高、且主要针对的是以串型水果为主的采摘,品种具有局限性。齐齐哈尔大学蒋超等[3]研究了基于传感器的自动识别水果采摘机。适用于大多数果园采摘,能高效、快速地采摘水果,极大程度上减少了劳动力,提高了采摘效率。东北林业大学孙雪等[4]提出了一种球形水果采摘机器人的总体结构方案,该机器人的主要特点是能够适应恶劣的地面环境、对果实伤害小、采摘效率高,能够为进一步研究开发实用型水果采摘机器人提供基础。南京农业大学董芒等[5]设计了一种轮式智能移动采摘平台,设计的转向机构和防撞梁机构,该移动平台结构合理,强度和刚度较高,运动精度高,符合实际工作要求。广东海洋大学曾嘉煜等[6]一种实用性高的无线遥控式高果采摘器。通过对已有的水果采摘器结构原理和使用步骤进行分析研究,结合红外遥控原理,由微型直流电动机驱动,采用可动机械爪结构,同时手柄部分采用可调伸缩杆结构,对高果采摘器结构进行合理设计。南京航空航天大学朱霞等[7]设计了一种用于智能水果采摘机器人的识别系统。该识别系统为后期果实的采摘提供了比较精确的参考。
目前国内的果蔬采摘机器人很大一部分是利用机械线缆机构方式驱动,在抓取果实应用中使用气动方式,鲜见有利用高低自由伸缩及可分离采摘机械臂的机构,结合影像识别技术定位果实,完成悬挂果的无损采摘。因此,一种便携式、无线遥感控制的高效梨果采摘装置的研制和应用,将降低悬挂果采摘作业的难度,促进我国农业采摘自动化水平的发展。
1 装置研制技术分析
1.1 自由伸缩可分离机械臂的运动学、动力学分析及稳定性控制
设计便携式智能高效的悬挂果采摘装置。需要经过试验仿真和实际调试,最终将实物制作大致分为:机械手装置、采摘部件、嵌入式控制模块、多视觉传感器模块、位置传感器模块等五大核心部分。通过UG 软件的三维设计分析功能,利用虚拟样机的仿真设计及动静力学分析技术,实现稳定的采摘动作路径规划及动力平衡,确保采摘过程的稳定性。
1.2 机械手与末端执行机构分析及平稳性存在的关键参数
设计出用于采摘智能控制技术的整体装置结构,研究嵌入式模块控制的优化构建与采摘稳定性的验证技术。建立悬挂果采摘装置的实际制作及优化的实验方法与验证手段。从智能制造技术制作完成样机的运行稳定性、连接杆与连接板的结合点处的速度及位移的变化曲线、从运动的稳定性及高效性角度出发,探索新型悬挂果采摘装置的切除执行机构及采摘稳定性的因素。
1.3 采摘装置末端切除执行机构分析及视觉定位方法
对末端的切除采摘机构,采用可分离高低两用的原则,设计出一种结构更为简单、通用性更强的末端执行器。通过较少的驱动器驱动,依靠无线控制模块和机械执行机构实现正常工作。该采摘末端执行器能根据橘树树干、枝叶和果实的实际情况进行调整,实现期望的抓取功能,易于控制,并能实现无损采摘。主要包括手持采摘机构的设计、力学分析、控制过程分析、抓取试验等。
1.4 智能高清影像定位识别技术的无线传感控制优化理论的实现
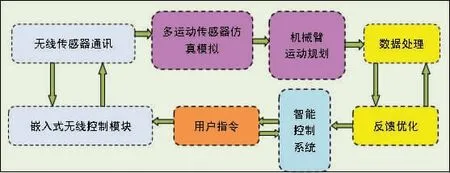
图1 智能水果采摘装置原理图
探索基于高清影像识别定位的嵌入式无线控制模块感知方法,检测智能水果采摘装置实现农业生产过程的动态优化技术等。初步完成相应装置的多运动传感器的设置及仿真,进行运动方案的规划,结合实验数据采集仿真分析验证,开展试验采摘实践,并实现悬挂果类智能便携式采摘装置的高效稳定的农业生产过程。
1.5 建立采摘机械装置的虚拟样机初期设计模型

图2 采摘装置虚拟样机初期设计图
如图2 所示,多传感器融合了多品种高果采摘装置,设计有视觉传感器、位移传感器、颜色传感器等多传感器控制的机械装置,实现多品种多形状水果的定位并采摘。在虚拟仿真设计中,采用机身稳定装置对整体装置进行仿真实验,并根据仿真实验数据及结果,合理编排传感器安装的位置及固定方式,采用移动式机身稳定装置设计,使得整个装置更加稳定,充分地融合嵌入式控制模块,提高高空水果采摘的智能化及精准性。设计便携式可分离的柔性可调节采摘剪切器,实现悬挂果的全地形高效智能采摘效果。
2 结论
便携智能高效采摘装置是对水果智能采摘机研制的技术革新,所研制的装置可推广到各个行业,满足农户及家庭合作社对采摘机的需求,服务农业具体工作。分析验证表明,装置能实现手持电动剪切部件的采摘效果,效率高、灵活、操控性非常强,达到高效率采摘低空的悬挂果。设计的无线遥控装置控制区的无线传感按钮,模拟实现剪切装置的快速剪切动作,达到远距离、高空控制的高效率水果的采摘。能够实现精准采摘规定尺寸范围内的各类品种球形水果,实现高低空水果的柔性化采摘的效果。
猜你喜欢
家庭影院技术(2021年7期)2021-08-14
无线互联科技(2021年4期)2021-04-21
电子制作(2019年7期)2019-04-25
小猕猴智力画刊(2019年3期)2019-04-19
电子制作(2018年23期)2018-12-26
电子制作(2018年19期)2018-11-14
电子制作(2018年16期)2018-09-26
军事文摘·科学少年(2017年4期)2017-06-20
电子制作(2017年8期)2017-06-05
小天使·五年级语数英综合(2015年8期)2015-07-06
