
履带起重机性能表高效制定软件研究
2020-03-28 12:25刘林楠秦义校李启宇
机械设计与制造 2020年1期
刘林楠,秦义校,李启宇
(1.太原科技大学机械工程学院,山西 太原 030024;2.中国建筑第二工程局上海分公司,上海 200120)
1 引言
履带起重机因其起吊重量大,能够带载行走和接地比压小等优点,在核电、风电和石油化工设备吊装领域中起着不可替代的作用[1]。随着时代的发展,对起重机的可靠性要求越来越高,对履带起重机性能的研究也在不断向前推进。由于履带起重机结构复杂,在对其进行受力分析时往往将臂架、回转系统和履带系统分开进行计算[2]。臂架作为履带起重机的主要承载部件,其强度和抗失稳能力与整机起升性能和可靠性密切相关。臂架一般有多种组合形式来适应各种不同的工况,为了制定履带起重机性能表就需要对模型进行多次调整,这就使工作量变得相当庞大。从查阅的资料来看,现阶段国内外对臂架的建模研究,一般是针对几种典型的工况来进行的,这就导致了对臂架的受力情况缺乏一个全面认识[3]。
针对上述问题,通过对臂架结构进行深入挖掘,利用臂架中的各部分结构具有很高的关联性和重复性这一特点,开发出一款履带起重机性能表高效制定软件,能够简单、直观地建立桁架结构的参数化模型,并对其进行非线性分析,得到各个不同工况下履带起重机的性能表。研究成果可以帮助国内履带起重机生产厂家进行性能表的研制与验证,协助企业提高设计效率,使履带起重机作业更加安全。
2 履带起重机臂架建模
2.1 履带起重机臂架的组成
履带起重机的臂架通常包含主臂、副臂、撑杆、拉板和变幅桅杆等结构[4]。主臂由底端臂节(底节)、中间连接节(中间节)和顶端臂节(顶节)三部分组成。底节和顶节一般为变截面的四弦杆空间桁架结构,标准节为等截面桁架结构。它们的截面形状基本为矩形,四根弦杆分布在截面的四个角点上,主要用来承受由臂架头部传递来的轴向载荷;腹杆有直腹杆、斜腹杆和空间斜腹杆三种,主要用来连接弦杆和承受剪切力。当前主要采用单双耳结构来实现臂节的拼接,这种结构的优点在于具有较好的传递载荷能力、便于拆装和转场。在复杂臂架组合中一般包含变幅桅杆、超起和腰绳。其中变幅桅杆可以有效地提高起重机工作幅度范围;超起有利于改善臂架受力情况并减小臂头下沉幅度;腰绳可以改善副臂受力情况并减小其下沉幅度。
履带起重机的臂架有多种形式,本系统中把各种不同的臂架组合形式归纳为三种。第一种为主臂结构,由一节变径底节、若干等截面中间节、一节变径顶节组成,是最为常见的一种组合形式,可以满足一般起吊高度需求的吊装场合。第二种为主臂和超起的组合结构结构,其臂架系统与第一种类似,其中超起结构可以增大主臂拉锁的预紧力来有效改善主臂头部的受力情况,从而增大履带起重机的起重量。第三种为主臂、副臂和超起的组合结构,其中还包含腰绳和撑杆等结构。
2.2 履带起重机臂架力学性能分析建模
软件采用自下而上的构建方法对履带起重机臂架进行建模,先利用ANSYS局部坐标系建立各臂节的模型,再把各臂节模型拼装成为一个完整的臂架系统[5]。各臂节均由弦杆、腹杆和加强板组成,其中弦杆和腹杆采用Beam188单元进行模拟,加强板采用shell181单元进行模拟。腰绳和拉索采用link10单元进行模拟,变幅桅杆采用Beam188单元进行模拟。底节建立在总体笛卡尔坐标系上,并通过坐标系的旋转直接转到所需工况的工作角度。剩下的臂节依此建立在依据前一段臂节顶部的节点定义的局部坐标系上,最后经过对重合节点的耦合,整个臂架系统模型就建立起来了。
2.3 履带起重机臂架的试加载
为了使模拟的结果更加接近实际状况,软件中臂架的受力情况是根据野外施工时的实际情况来制定的,受力主要有:(1)臂架上所承受的因臂架自重产生的重力(考虑货物起升时产生的振动);(2)桁架臂头所承受的货物重力(考虑货物起升时产生的振动);(3)桁架臂头所承受的卷扬机构产生的钢丝绳拉力,其角度一般与主臂保持恒定,大小根据臂头滑轮组的倍率来计算;(4)桁架臂头所承受的臂架后方拉索传递的拉力;(5)臂架的迎风面上所承受的野外作业场地内风产生的阻力[6-9]。其中,货物重力载荷需要以迭代方式逐渐增加,直到找到满足臂架系统所有杆件的各自强度、刚度与杆件稳定性条件的最大载荷,并以这些临界值来生成性能表。
对臂架系统模型的约束主要是对臂架底节铰接处的固定限制和对各个臂节铰接处的约束限制。本软件通过约束X、Y、Z轴的平动自由度和绕X、Y轴的旋转自由度来模拟铰接。
3 性能表高效制定软件的编制
3.1 系统的工作流程
软件的源程序中写入了能够生成APDL命令流的程序,使用时只要输入的臂架参数和工况条件系统就会自动生成各种不同工况下APDL命令流。然后调用Ansys读取生成的APDL命令流,对此工况下的臂架进行起吊载荷迭代变化的非线性分析,当臂架杆件处于机械性能要求的临界值,就生成对应工况的性能表的起重量值,并以一定数据格式存入性能表库中,如果载荷过大就需要减小载荷再进行受力分析,直到找到该工况下所能承受的最大载荷。最后根据性能表函数中储存的结果按照设定好的格式生成性能表。软件系统的工作流程,如图1所示。

图1 软件工作流程Fig.1 Software Flowchart
3.2 软件系统窗体的设计
软件的界面由登录界面、操作主界面和一些辅助界面构成,可以通过在登录界面上输入正确的用户名和密码来打开系统主界面。系统主界面为父界面,余下的辅助界面均为其子界面可以通过系统主界面上的菜单进行调用。系统主界面上的菜单由开始、臂架类型、臂节参数、工况、结果显示和帮助六部分组成。其中开始菜单项包括新建工程、打开工程、保存工程和退出;臂架类型菜单项中可以选择提到的三种臂架类型;臂节参数菜单项包含主臂、副臂、超起和撑杆四个二级菜单,对二级菜单项进行选择可以打开各自对应的子窗口,在子窗口中能够对不同臂节的参数进行设置;工况菜单项可以打开对臂架工作幅度和仰角等参数进行设置;显示结果菜单项中可以查看生成的APDL命令流和性能表;帮助菜单项可以查询系统各部分的使用说明,也可以直接打开百度让用户进行搜索,还可以修改用户名和密码。系统中的部分工作界面,如图2所示。
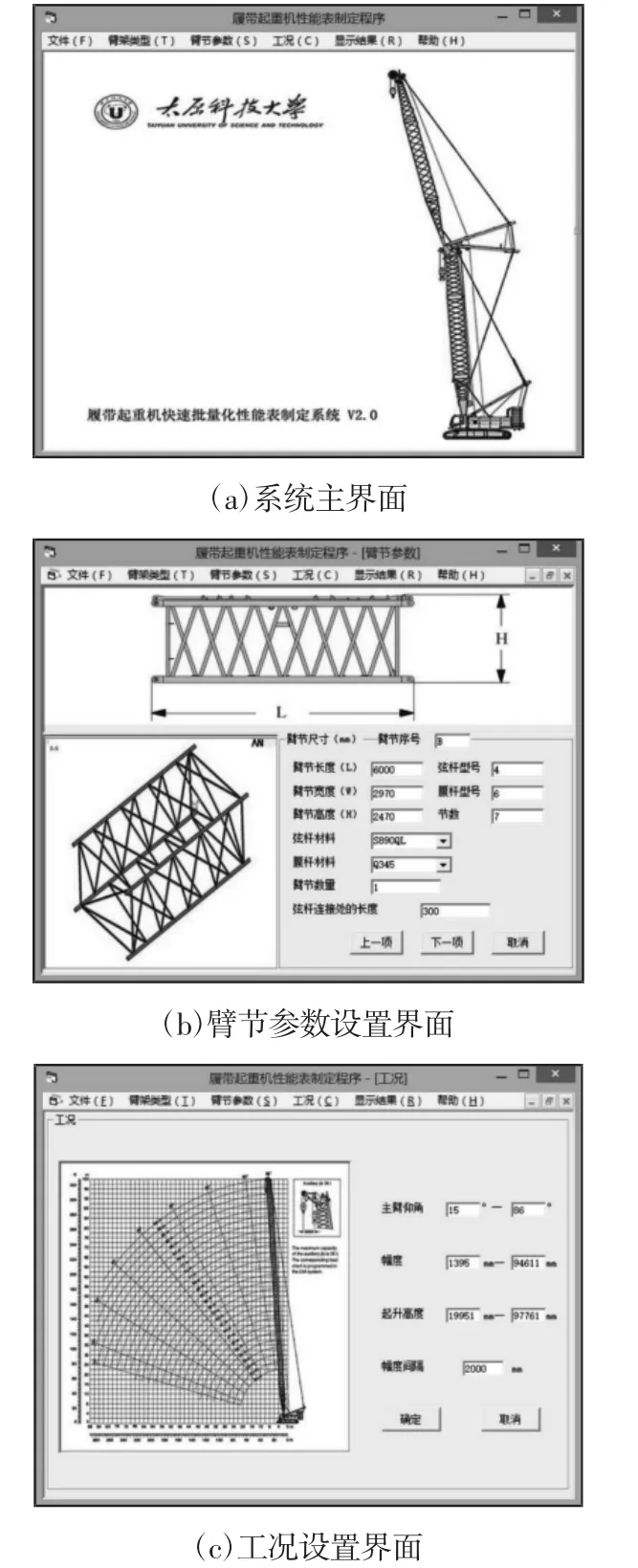
图2 系统工作界面Fig.2 System Working Interface
3.3 系统中标准模块的建立
为了提高程序的可读性和可维护性,将与特定窗体无关或者关联性比较小的代码放入标准模块中。为了方便统一查询管理变量,在标准模块中统一定义了系统中会用到的各种变量、数组和数学符号代码。
Publicsum_LengthAsSingle′臂架总长度
Publicarray_cs(4)′坐标系编号,坐标系原点,x点,y点,z点
…
Publicarray_f(100)AsSingle′幅度数组
PublicpiAsSingle′π 值
3.4 系统数据库类模块的建立
为了方便数据库的频繁调用,减小代码冗余程度,文中提及的系统将登陆信息、管材信息、材料信息等结合为共用数据类模块。下面以登陆数据库为例详细介绍具体建立与使用步骤。
(a)建立扩展名为.cls的类模块并对其中出现的变量进行定义。
PrivateLconnAsADODB.Connection
PrivateLconnectionstringAsString
(b)对类模块进行初始化,然后连接数据库。
PrivateSubClass_Initialize()
Lconnectionstring="Provider=Microsoft.Jet.OLEDB.4.0;DataSource="
&App.Path&"data.mdb"连接data.mdb数据库
SetLconn=NewADODB.Connection
Lconn.OpenLconnectionstring
EndSub
(c)定义事件,读取Access中数据内容。
Public Function GetList(ByVal strcmd As String,Optional pswhere As
String)AsObject
DimrsAsADODB.Recordset
Setrs=NewADODB.Recordset
rs.CursorLocation=adUseClient
ExitFunction
(d)实例化mclsMidTier为新对象,然后即可调用对象中的事件GetList从而建立数据链接。
SetmclsMidTier=NewclsMidTier
Setrs=mclsMidTier.GetList("select*fromUserInfo")
′调用用户信息
Setrs=mclsMidTier.GetList("select*fromTubeInfo")
′调用管材信息
Set rs=mclsMidTier.GetList("select*from MaterialInfo")'调用材料
信息
(e)在调用用户信息数据库时,读取用户输入的用户名,与得到对应的密码进行比对是否一致,一致则进入软件操作,不一致则提示密码无效,重新登陆。
Ifrs("UserPassword")=txtPassword.TextThen
Frmmain.Show
UnloadMe
ElseIfrs("UserPassword")<>txtPassword.TextThen
MsgBox"密码错误",vbExclamation+vbOKOnly
EndIf
这样就建立了系统的数据库类模块。
4 实例验证
以履带起重机LR1300的主臂结构为例,建立由底节、一节3m中间节、一节6m中间节、五节12m中间节和臂头组成的臂架模型,其主臂长度为86m,工作幅度范围为(6~80)m。限于篇幅的原因,本中仅列出幅度为44m工况的分析结果。通过软件系统所生成的某一工况的Ansys云图,如图3所示。
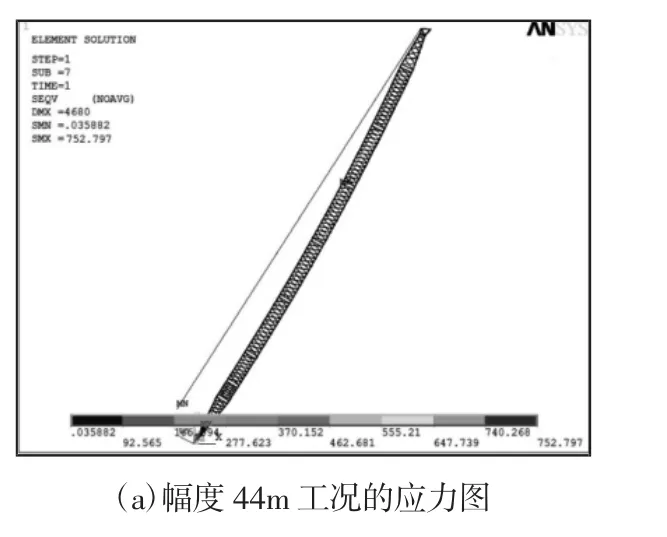
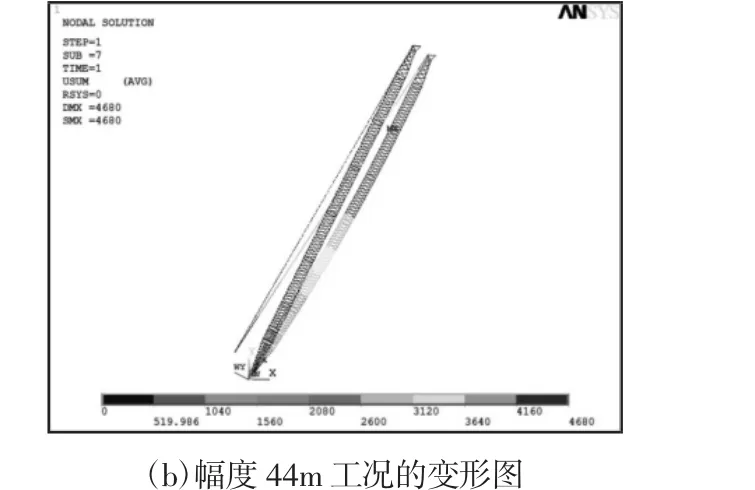
图3 Ansys非线性分析结果Fig.3 Results of Ansys Nonlinear Analysis
修改主臂长度,经过多次循环后得到的履带起重机性能表,如表1所示。

表1 生成的部分性能表Tab.1 Part of Generated Performance Table
把软件生成的性能表和LR1300履带起重机的性能表进行比较可以得到性能比较曲线图,如图4所示。

图4 性能比较曲线Fig.4 Comparison of Performance Curves
由表1数据和性能比较曲线可以看出,系统生成的臂架承载力性能比样本机型出厂性能表中的承载力性能高,提高率随工作幅度的增加而增大,所以,在工作幅度较小的工况中,履带起重机的起重性能主要由臂架承载力决定,在幅度较大的工况下,臂架承载力的重要性减小,基于整机倾覆稳定性的作用对于履带起重机起重性能的影响增大,即在较大幅度、较长臂架的工况下,臂架承载力与样本机型参数的出入有待进一步研究,例如探讨非线性动力学问题、风载荷的施加应涉及到流体力学及混沌理论等等,可以在后续的研究中通过改善履带起重机下车结构及重心的合理安排来优化其起重性能。
5 结束语
基于可视化编程语言,调用ANSYS进行多工况结构性能分析,在保证履带起重机臂架承载能力的基础上,构建了一套履带起重机性能表高效制定软件。研制的软件能够快速、直观地建立桁架结构的参数化模型,并对其进行非线性分析,得到各个不同工况下履带起重机的性能表数据。本研究成果可以帮助履带起重机制造企业产品高效开发设计,并使履带起重机作业更加安全。
猜你喜欢
兵器装备工程学报(2021年3期)2021-04-09
石油化工建设(2019年6期)2020-01-16
中国工程机械学报(2019年6期)2019-12-31
中国特种设备安全(2019年7期)2019-09-10
中国特种设备安全(2018年10期)2018-12-18
质量技术监督研究(2018年1期)2018-03-26
现代农机(2018年1期)2018-02-11
制造业自动化(2017年2期)2017-03-20
专用汽车(2016年7期)2016-11-23
船舶标准化工程师(2015年5期)2015-12-03
