支柱形式对小水线面双体船波浪增阻和运动响应的影响
2020-03-30 08:35李冬琴章易立姜翰东
江苏科技大学学报(自然科学版) 2020年1期
李冬琴,章易立,李 鹏,张 冲,姜翰东
(1.江苏科技大学 船舶与海洋工程学院,镇江 212003) (2.江苏现代造船技术有限公司,镇江 212003)
小水线面双体船(small water-plane area twin hull, SWATH)相比单体船具有良好的耐波性,特殊的构造使得其在波浪中航行时所受的扰动作用比常规船要小得多,并且拥有较长的横摇周期,因而耐波性较好[1-3],受到了船舶行业的高度关注.然而结构的特殊性也带来了一定的问题,SWATH由于水线面面积小,其纵倾恢复力矩仅为常规船的10%~20%,特别是在中高速航行时,作用于水下潜体上的孟克力矩[4](Munk monent)容易使船丧失纵向运动稳定性,致使纵稳性较差,所以SWATH在波浪中航行时的运动响应是必须考虑的一个因素.而波浪增阻作为快速性研究的重要内容之一,同样也是不可忽视的研究对象[5-6].目前,大多数SWATH研究主要围绕SWATH与常规双体船的对比分析,对于SWATH支柱形式对船体影响所做研究还比较少,且大多仅仅证明了其出色的耐波性能,并未考虑支柱对波浪增阻性能的影响.
支柱作为连接SWATH上船体和下潜体的关键结构,与波浪直接接触,因此支柱的结构形式直接影响船体波浪增阻和耐波性能.目前对于支柱形式的研究仍以兴波阻力和耐波性能为主.文献[7]中利用Shipflow研究了前支柱位置对船舶兴波阻力的影响;文献[8]中针对不同支柱倾斜角度的SWATH进行了设计航速下的耐波性能研究;文献[9]中基于三维势流理论计算了某斜支柱SWATH使用不同支柱构型的耐波性能;文献[10]中参照了穿浪双体船的支柱形式设计了一种新型小水线面穿浪双体船并研究了其阻力性能.因此,文中将基于数值波浪水池,研究支柱间距、斜度和单侧双支柱形式对SWATH在迎浪规则波中波浪增阻特性及运动响应的影响.
1 基本理论
基于流体力学理论和自由表面运动追踪技术,首先建立数值波浪水池(图1).数值波浪水池的数学模型主要由连续性方程和N-S方程两个控制方程组成:
(1)
(2)
式中:ρ为流体密度;ui为流体质点在i方向的速度分量;p为流体压力;μ为动力粘性系数;fi为质量力.

图1 三维数值波浪水池Fig.1 3D numerical wave tank
湍流模型选用目前应用较为广泛的标准k-ε模型.采用有限体积法离散控制方程并使用二阶迎风格式离散对流项和扩散项,扩散项为中心差分格式,压力-速度耦合采用SIMPLE方法进行迭代求解.对于自由液面的追踪使用流体体积(volume of fluid,VOF)方法,该方法原理通过研究网格单元中流体和网格体积比函数F确定自由面,追踪流体的变化,而非追踪自由液面上质点的运动,其方程为:
(3)
式中:a1、a2分别为空气相、水相的体积分数,并定义aq=0.5处为自由波面.
2 计算方法验证
为了验证以上所述计算方法的可行性,选取Delft-372双体船进行迎浪规则波中船体波浪增阻和运动响应的验证计算[11],船的几何模型如图2,其基本参数见表1.

图2 Delft-372双体船模型Fig.2 Ship model of Delft-372
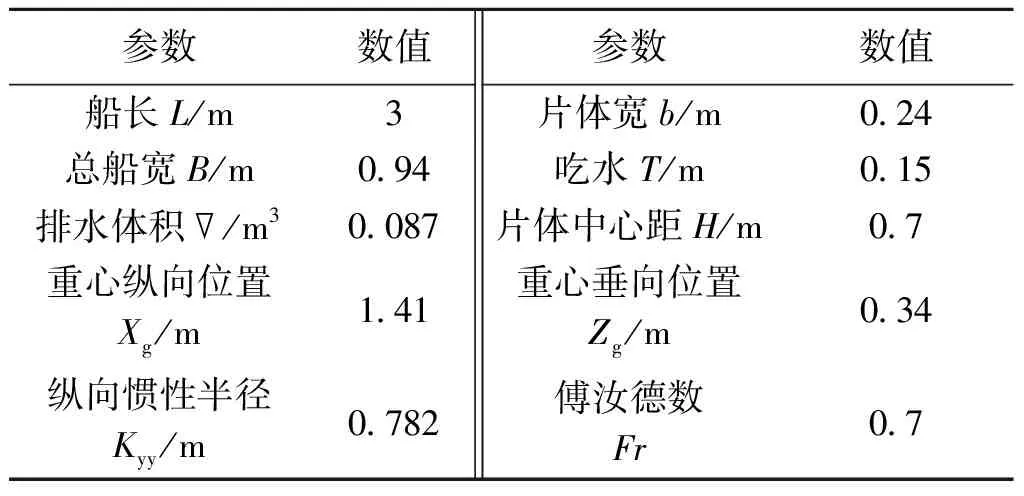
表1 Delft-372船型主尺度表
2.1 计算域及边界条件设置
计算域的选取应在确保对流场信息准确捕捉的同时避免过大的网格数量,由于双体船的两个片体关于中纵剖面对称,因此所形成的流场也是完全对称,为了提高计算效率,采用半模计算加对称边界条件的方式生成计算网格.通过参考文献[12]并对流场开展分析,确定计算域尺寸为4L×3L×3L,计算域的入口距离船首1倍船长,文中计算域的出口距离船尾3倍船长,设置为压力出口,消波区域的长度为1.5倍船长,设置在计算域出口处,计算域的宽度则控制在3倍船长左右,水深2L.计算域如图3.

图3 计算域设置Fig.3 Setting of computational domain
2.2 网格划分
网格作为CFD计算中最关键的因素,其形状好坏,质量大小,数量多少都对计算结果的精度和收敛性有直接的影响.采用STAR-CCM+中的网格划分功能,自由液面以外部分采用切割体网格划分,自由液面采用棱柱层网格划分,为了减少计算量,甲板上不设棱柱层网格,此外为了准确捕捉船体周围流场信息,需要对自由液面等关键部位进行网格加密,其中在一个波长范围内保证有60~100个网格,波高方向上保证有10~20个网格,并保证相邻区域之间网格尺寸的连续性[13].网格划分如图4.
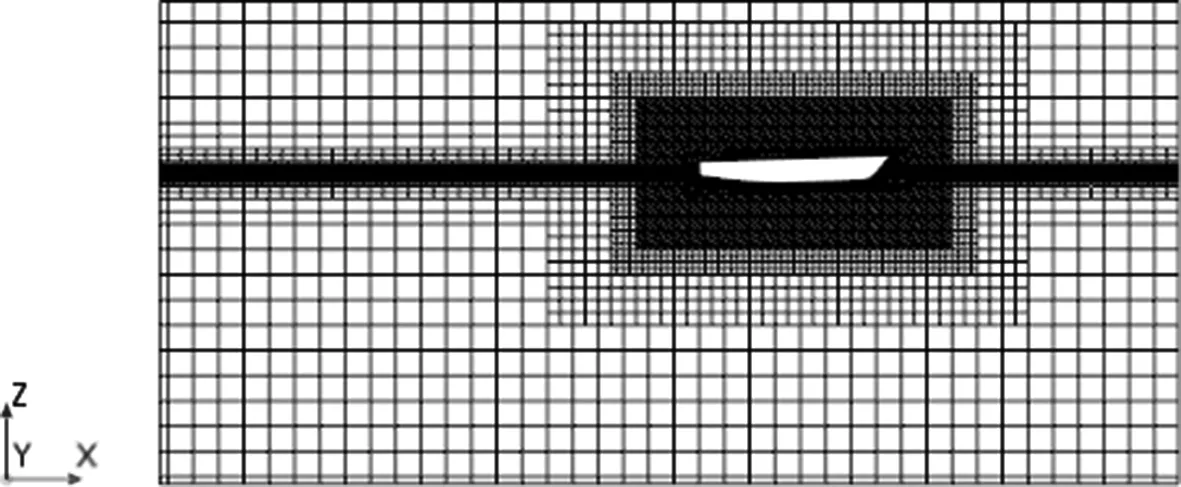
图4 网格划分Fig.4 Grids of computational domain
对于静水阻力的计算,仍采用上述计算域及网格划分,将物理连续体设置为静水并改为合适的边界条件.将计算后得到的波浪增阻、纵摇和垂荡幅值响应结果与试验数据对比,如图5,λ为波长,θa″为纵摇传递函数,za″为垂荡传递函数,σAW为波浪增阻系数,计算结果如表2.可以发现,采用CFD技术计算得到的纵倾、垂荡传递函数及波浪增阻系数都与试验值吻合良好,最大误差在15%左右,变化趋势也较为一致,证明了文中所使用CFD计算方法对于模拟双体船规则波中航行时的可行性和准确性,可用于文中对SWATH的仿真计算.

图5 计算结果对比Fig.5 Comparison of calculation results

表2 计算结果对比
3 SWATH波浪增阻数值计算分析
初始SWATH船型主尺度参考相关资料[14],如表3,为了保障船体的纵向稳性,模型首尾安装有稳定鳍[14],模型见图6.

图6 SWATH模型示意Fig.6 Schematic diagram of SWATH

表3 SWATH主尺度表
为了研究SWATH支柱形式(支柱间距、支柱斜率和单双支柱)的变化对其波浪增阻及运动响应的影响,总共设计了18种支柱形式,不同形式间通过微调(双支柱形式支柱纵向总长度不变,支柱横向宽度略微增大)保持排水量不变,各支柱形式如表4.初始船型及几个典型变化形式如图7.计算域及网格划分仍用上文所述方法,故不再赘述,网格数量在150万左右.
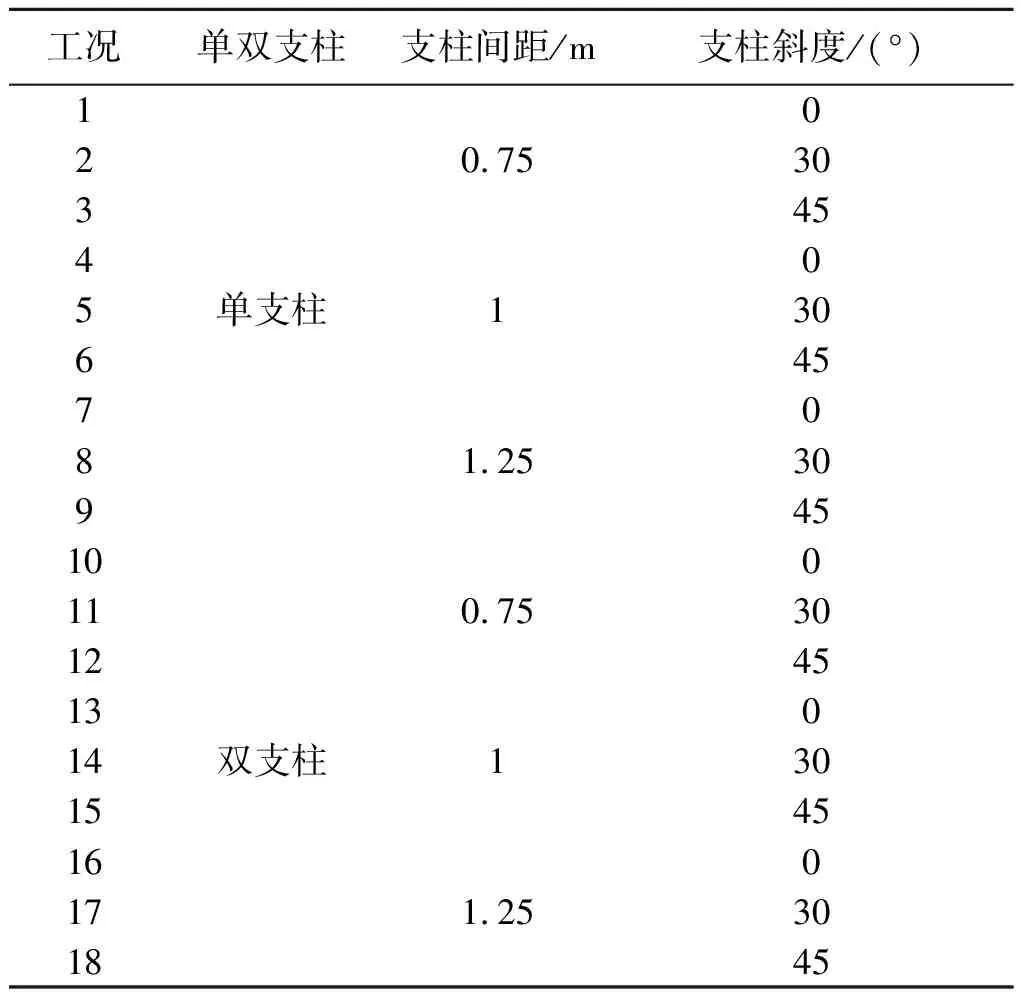
表4 SWATH各支柱形式汇总
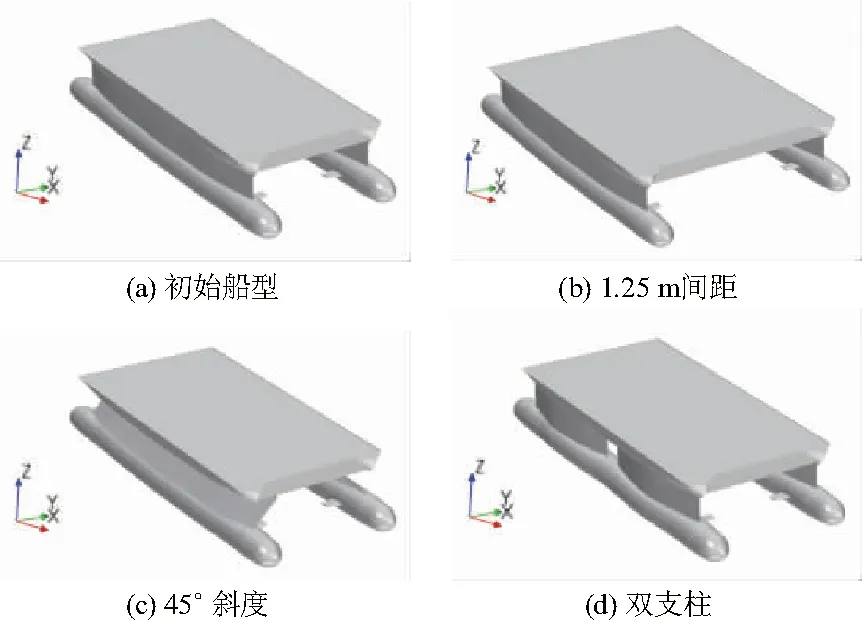
图7 SWATH初始及典型支柱变化形式
Fig.7Initial and typical strut variation forms of SWATH
由于文中计算工况较多,因此只选用一种典型规则波工况开展后续数值计算,为此总共选了5组不同波长的一阶规则波,波高选用资料所用波高[15],如表5,对初始船型进行模拟,各计算结果如图8,可以看出λ/L=1.3工况下SWATH波浪增阻系数及运动幅值最大,此时波浪频率接近船舶的自振频率,产生了共振现象,因而阻力与运动响应相对较大.为了便于后续比较同一规则波中SWATH支柱变化对增阻和运动的影响,选用Case IV(λ/L=1.3)作为基准工况开展后续研究.
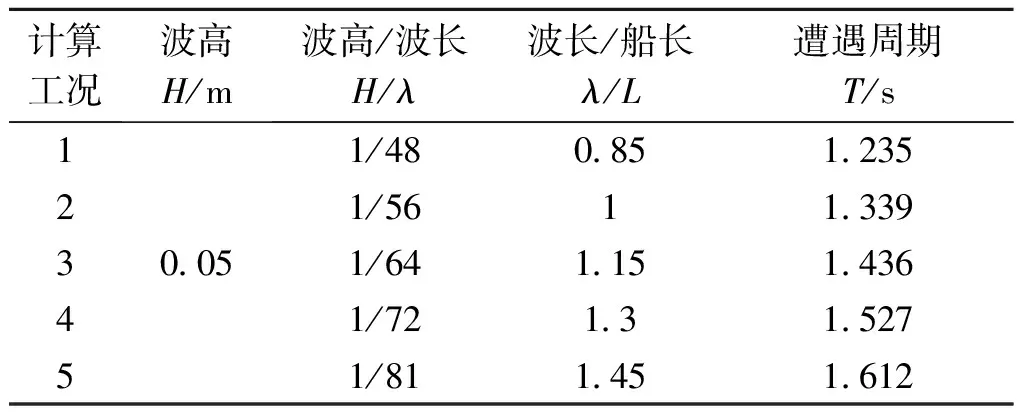
表5 波浪要素

图8 SWATH迎浪阻力与运动响应Fig.8 resistance and motion of SWATH in waves
3.1 支柱形式对SWATH运动响应的影响
船舶在波浪中迎浪航行时,由于波浪的扰动作用产生摇荡运动,其中纵荡运动较小且对其他运动及波浪增阻几乎没有影响,而垂荡和纵摇运动对船体阻力的影响较大[15],因而文中仅考虑船体的垂荡和纵摇运动.
为了便于计算结果的比对,通常对运动计算结果进行无量纲化处理,无量纲化垂荡与纵摇幅值表达式:
(4)
式中:za为垂荡振幅;θa为纵摇振幅;A为波幅.
3.1.1 SWATH垂荡响应分析
各支柱形式SWATH的垂荡传递函数计算结果对比如图9,由图可知:
(1) 当支柱间距相同时,不论单双支柱SWATH垂荡幅值都与支柱斜度成正比,这是由于支柱的倾斜使得船体的附加质量和阻尼系数发生了改变,因而船体航行时的运动响应大幅提高.其中垂荡幅值最小的单支柱SWATH(Dy=1.25 m,斜度为0),为0.867×10-3m.
(2) 当支柱斜度为30°和45°时,单双支柱SWATH垂荡幅值均随支柱间距的增大而减少,并且可以看出,随着支柱间距的增大,其对垂荡幅值的影响愈发不明显,其中在单支柱工况中,间距1 m和1.25 m的两条线几乎重合,因而适当地增大支柱间距可以改善SWATH的垂荡响应.而当支柱斜度为0时,单双SWATH的垂荡随支柱间距的变化并无明显的规律.
(3) 单支柱与单侧双支柱的布置对SWATH垂荡运动的影响无明显规律性.当支柱斜度较小,支柱间距相同时,双支柱形式的SWATH的垂荡幅值要大于单支柱形式,而当斜度增大到45°后,双支柱SWATH的垂荡响应幅值略小于单支柱形式.
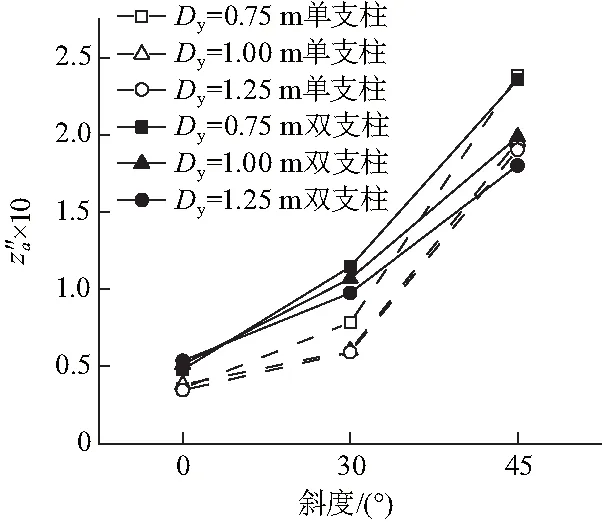
图9 垂荡传递函数对比Fig.9 Comparison of transfer function of heave
3.1.2 SWATH纵摇响应分析
SWATH在不同支柱形式下的纵摇传递函数对比如图10,可以发现:
(1) 单、双支柱SWATH在支柱间距相同的情况下,纵摇幅值都随着支柱斜度的增大而增大,由于SWATH的纵向稳定性不是太好,因此为了保证SWATH的纵向稳性,支柱的斜度不宜太大,其中纵摇幅值最小的是双支柱SWATH(Dy=0.75 m,斜度为0),为0.122°.
(2) 当支柱斜度相同且≤30°时,单双支柱SWATH纵摇幅值与支柱间距并无明显联系,而当支柱斜度为45°时,单支柱SWATH的纵摇随间距的增大而减小,双支柱SWATH则与之相反.
(3) 与垂荡运动情况相反,当支柱斜度为0和30°,支柱间距相同时,双支柱形式的SWATH的纵摇幅值要小于单支柱形式,当斜度达到45°后,双支柱SWATH的纵摇稍大于单支柱形式.

图10 纵摇传递函数对比Fig.10 Comparison of transfer function of pitch
图11为计算稳定后初始及典型支柱变化形式SWATH在规则波中航行的自由面波形图,可以看到,CFD软件较好地捕捉到波浪的自由液面及船体周边的复杂流场.
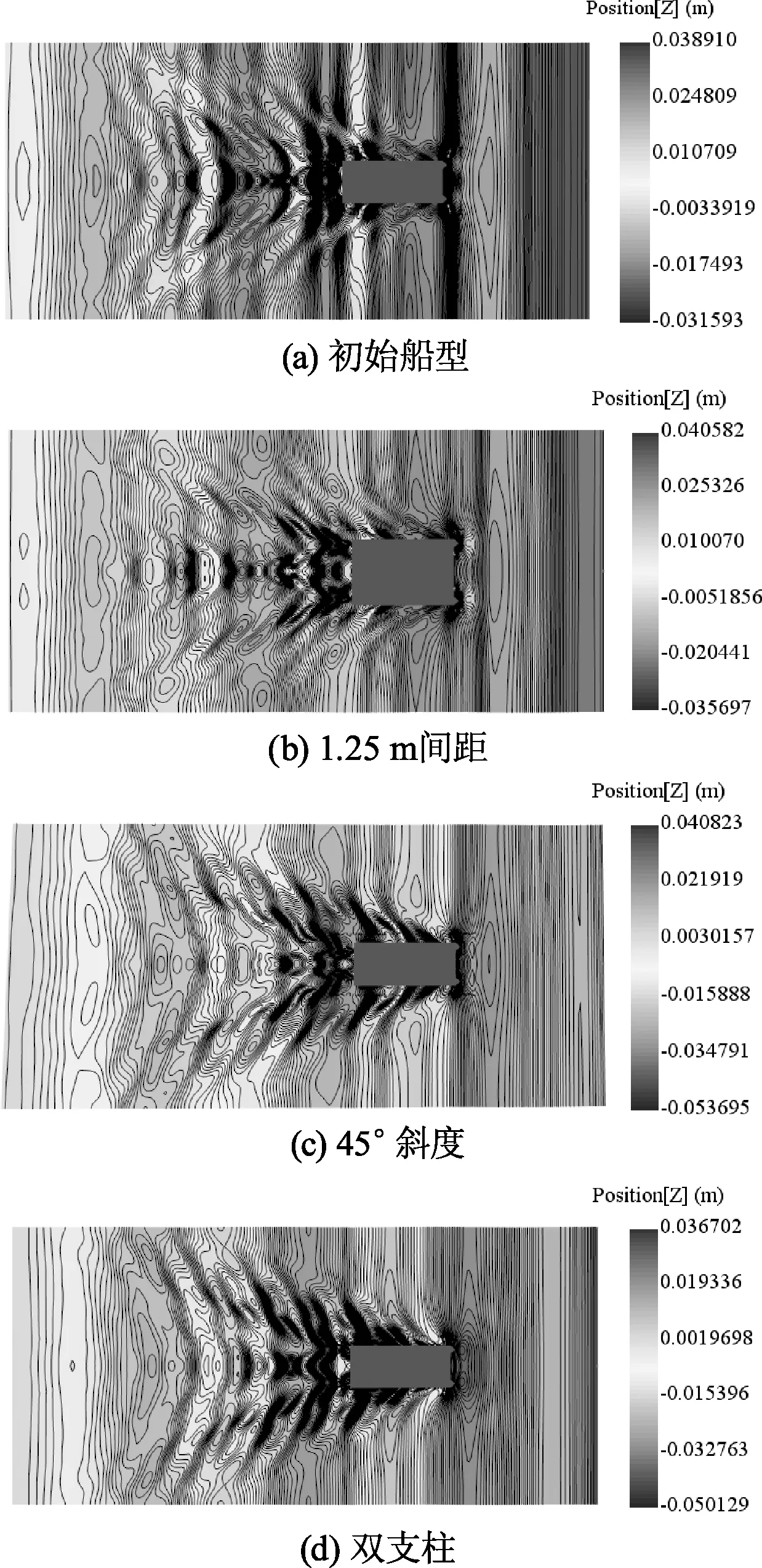
图11 初始及典型支柱变化形式SWATH瞬时自由面波形Fig.11 Instantaneous wave form of the initial and typical strut variation forms of SWATH
3.2 支柱形式对SWATH波浪增阻的影响
规则波中船舶增阻RAW为波浪中船舶平均阻力与静水阻力的差值,即RAW=Rwave-Rcalm,Rwave为波浪中的平均阻力,Rcalm为静水阻力,通过计算模型在静水中的数值仿真计算得到.为了方便比较,将RAW无因次化:
(5)
图12为各支柱形式SWATH的波浪增阻系数对比,由图可知:
(1) 支柱间距一定时,单支柱SWATH的波浪增阻系数随着斜度的增大有逐渐减小的趋势,可见支柱倾斜可以减少单支柱SWATH在迎浪航行时产生的能量消耗,但是在没有特殊需求的情况下不应超过45°,因为倾斜角度越大对支柱结构强度的要求也会相应增大;而双支柱SWATH则与之相反,随斜度增大逐渐增大,这是由于在单侧双支柱的布置下,支柱的倾斜使得片体内侧的流场变得更加复杂,增大了支柱间的互相干扰.其中波浪增阻系数最大的为双支柱SWATH(Dy=0.75 m,斜度为45°).
(2) 支柱斜度相同情况下,单双支柱波浪增阻系数均随支柱间距的增大而减小(仅双支柱SWATH在斜度为0时附近无明显规律),这是由于片体间距离越小,片体间的干扰越严重,导致波浪增阻增大.
(3) 当支柱间距≤1 m,斜度≤30°时,双支柱SWATH波浪增阻系数要小于单支柱形式,考虑SWATH的快速性此时可以考虑布置单侧双支柱;而当Dy=1.25 m时,任意支柱斜度的双支柱SWATH波浪增阻系数均大于单支柱形式.

图12 波浪增阻系数对比Fig.12 Comparison of the coefficient of added resistance
4 结论
基于数值水池,结合重叠网格与DFBI技术针对多种支柱形式SWATH的波浪增阻和航行姿态进行了数值模拟与分析,得出:
(1) 支柱斜度对迎浪下SWATH运动响应有着显著的影响,具体表现为支柱斜度的增大会增大SWATH的纵摇和垂荡运动幅值,降低船舶的耐波性能,出于船舶航行安全考虑SWATH支柱斜度不宜过大.单支柱SWATH波浪增阻随斜度增大而减小,因而考虑到船舶的快速性能单支柱SWATH可以适当增加支柱斜度,双支柱SWATH波浪增阻则与之相反,随支柱斜度增大而增大.
(2) SWATH波浪增阻随支柱间距增大而减少,这主要是由于支柱间距越大,片体间流体干扰作用越小.
(3) 单侧布置双支柱与单支柱相比对SWATH增阻及运动响应的影响并无直接规律,因此在设计双支柱SWATH时还应考虑支柱间距、斜度和海况等其它因素,以提高船舶的航行性能和阻力性能.
猜你喜欢
计算技术与自动化(2022年1期)2022-04-15
舰船科学技术(2021年11期)2021-12-12
粮食加工(2021年6期)2021-12-03
石油化工应用(2020年5期)2020-06-07
能源(2017年7期)2018-01-19
珠江水运(2017年14期)2017-09-08
振动与冲击(2016年8期)2016-05-20
少儿科学周刊·儿童版(2015年7期)2015-11-24
中国领导科学(2015年11期)2015-07-01
中国军转民(2012年8期)2012-10-29