移动扫描技术在地铁隧道监测中的应用
2020-03-31 02:15郭玲
矿山测量 2020年1期
郭 玲
(上海市建筑科学研究院,上海 200032)
三维激光扫描技术是近几年来在测绘行业不断应用发展的新型技术,除了应用在获取城市建筑、地面三维模型与一些文物保护与修复上,地铁隧道的高精度收敛变形监测也是近年来一直研究的方向。
由于地铁停运时间较短,往往一晚上能够对地铁隧道进行检测的时间只有3~4 h左右,传统方式如钢尺收敛计和全站仪激光对点等检测速度已不能满足越来越多的地铁隧道检测计划要求,至2020年,上海地铁将拥有20条地铁线路,总里程多达877 km。本文介绍了三维激光推扫小车组成与在地铁隧道收敛监测的中的应用,以其目前精度分析三维激光移动推扫系统在未来地铁隧道监测监护中的可行性。
1 三维激光推扫系统基本原理
1.1 三维激光推扫小车组成
推扫小车主要由可拆卸轨检小车、Faro Focus 3D激光扫描仪和一台笔记本电脑组成。轨检小车呈T字形,上下两侧分别为2个和1个滚轮,可与轨道保持良好接触,在T字型上侧2个滚轮上配置了里程传感器。小车顺着轨道前行,扫描仪可以记录下隧道内壁连续的点云数据,里程计记录在隧道轴向移动距离,通过电脑匹配扫描仪数据,实现地铁隧道内假三维空间的复原,如图1所示。
1.2 里程数据提取与优化
系统采用旋转式编码器作为计数工具,采集器采用stm32作为主控,采集数据以ASCII格式串口打印输出。里程仪获取扫描时间序列里程数据,作为扫描隧道第三维信息,操作中,同步扫描仪与里程仪数据采集,扫描仪根据点时间、里程集及时间,内插出各点里程数据。里程仪采集数据频率越高,意味着相邻里程时间间隔越小,推扫运动信息越全面,内插出各点里程信息精度越高。

图1 激光扫描仪推扫小车作业图
小车的里程计虽然记录精准,但由于小车滚轮半径误差与轨道距离的行进上的误差,随着里程仪记录距离越来越大,里程记录误差越来越大,应在合理距离清零里程。里程仪有效采集频率为5~15 Hz,但增大里程仪的频率,串口接受与传输数据间将会产生误差,导致里程数据出错率将大大增加。在多次试验的结果下,推荐设置采集频率为10 Hz,同时每隔600个里程记录数据清零并重新记录。
1.3 扫描仪设置
FARO FOCUS 3D扫描仪支持两种扫描模式:螺旋扫模式和球形扫模式。球形扫模式俗称站扫,扫描仪镜片可绕垂直方向旋转300°,扫描仪主体可绕水平轴旋转360°,获得观测区域近似全方位3D点云数据。当仅需要采集二维轮廓信息时,扫描仪一般采用螺旋扫模式。在螺旋扫模式下,扫描仪水平度盘将被锁定,扫描仪镜片绕垂直轴旋转采集数据。使用轨道小车装载扫描仪前进,获取大范围轮廓。
在螺旋扫模式下,扫描仪激光镜片旋转一圈,会得到一圈隧道内壁的扫描线,扫描仪可以重复记录扫描线,见图2。通过电脑调用扫描仪开始与停止函数实现启动与关闭扫描,当前扫描线数据采集完成并确定后,扫描仪停止工作,当小车停止移动时,扫描仪可能还在执行螺旋线扫模式,须耐心等待扫描仪停止运行,不能移动小车位置,防止点云系统匹配出现误差。

图2 推扫数据显示
2 移动激光扫描系统流程与处理
2.1 里程数据预处理
预处理流程主要为匹配不同仪器间的数据与改正粗差,三维激光扫描系统最为关键的一点就是匹配里程数据与扫描数据,从而形成假三维空间点云数据,由于电脑usb接口传输与接受串口数据时会出现微小的误差,里程计记录下的里程由于传输时间延误等会导致相隔2个里程间隔时间缩短或拉长,最后在生成隧道平铺图时,会发现存在区域性的图像拉伸压缩或灰度集中的现象,这是由于点云数据分配给每一环的里程区间并不合理的问题。
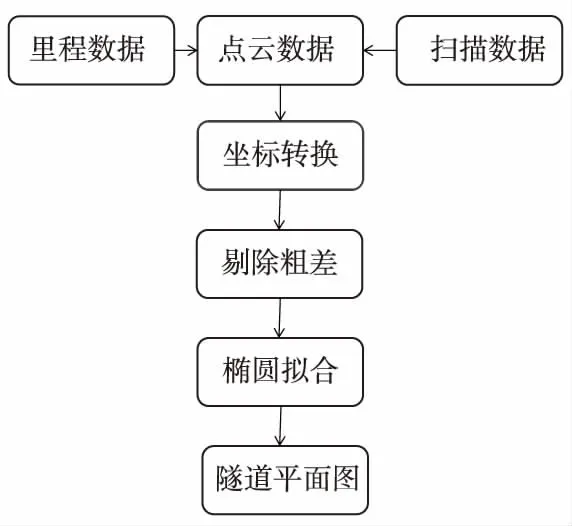
图3 移动激光扫描系统处理流程示意图
解决方法目前有2个,一是从数据的角度上,默认里程计与扫描仪频率不会产生变化,即每个数据间间隔与小车前进速度不会产生突变,通过解算每一点的速度,在接受数据时采用校检码剔除速度大于2 m/s的点;二是每间隔600个里程数据便重新记录下一段里程,消除累计误差的影响,重新结算里程会导致最终里程数据大于实际推扫区间的长度,在多个里程记录单元内,引入粗差探测法检测记录单元的起始和终点终点里程的正确性。拼接所有记录单元,恢复移动测量测段的从零开始递增的里程数据。
设误差方程为:

式中,V是n维观测值残差向量;A是n×t阶系数矩阵;X是t维参数估值向量;L是n维观测向量,各观测值分别用Li表示。参数最小二乘解为:
可求得观测值残差向量V,及其对应的权逆阵为:
QV=P-1-A(ATA)-1+AT
QV的对角线元素qv1,qv2,…,qvn是观测值残差v1,v2,…,vn的权倒数。由于观测值独立,有:
式中,Ai是观测值A的第i行。观测值Li的方差为:
标准化残差为:
当观测值没有粗差时,vi%是服从标准正态分布的随机变量。当|vi%|大于给定的限值,一般限制取值2或者3,即认定观测值Li存在粗差。
2.2 坐标转换与剔除粗差
扫描仪得到的fls格式的点云坐标为激光扫描仪独立坐标系下的坐标,根据扫描仪扫描角度与扫描仪和轨道的相对位置,通过旋转平移的方式转换为地铁隧道的测量坐标系,再结合里程文件形成假三维空间的点云数据。在考虑隧道内壁的拟合时,需先将测量坐标转换为平面坐标,同样是通过旋转平移的方式,提取一定厚度的三维空间的点云,形成一个平面的断面点,根据测量坐标系点,使用求解的平移参数和旋转矩阵,求解平面坐标。
由于扫描仪得到点云数据包含了大量的噪声点与离散点,非常不利于后续的拟合计算,在拟合之前,通常使用RANSAC算法对剔除粗差,通过反复选择断面数据中的一组随机子集来达成目标,被选取的子集被若适用于预估的模型则假设为局内点,在有限次的计算内,若有足够多的局内点,则认为模型正确,通过不停迭代的方式,根据局内点与模型的错误率筛选模型,直至选取出最佳的模型。
受扫描仪相对位置与前行方向的影响,实际中会存在有扫描仪垂直向误差,扫描仪天顶向误差与扫描前行误差,这些误差在后期拟合椭圆时会产生不可忽略的影响,需立即纠正。
2.3 椭圆拟合
由于地铁隧道埋深一般较浅,隧道管片一般为钢筋混凝土管片,受到的土压力与孔隙水压力不会使隧道管片产生塑性变形,可以默认为刚体,即隧道内的一片管片都是均匀连续的二次曲线。在拟合点云数据时,采用分管片拟合的方式,将隧道封顶块、连接块与拼装块分别进行椭圆拟合,椭圆拟合需要解算出椭圆的5个基本特征参数,椭圆的圆心X0,Y0、长半轴与短半轴a、b,与长半轴方位角α,一般的椭圆拟合方法有一般二次曲线标准化法、特征根法、数值导数法、至焦点距离和不变法,考虑到适用性问题,采用的特征根法与一般二次曲线标准化法均可满足精度与速度的要求。

图4 地铁隧道管片分布示意图
3 工程应用实验
为了验证激光推扫系统的准确性与可行性,采用c#语言将本文上述研究内容整理为可自动解算的推扫程序,通过在地铁内往返推扫重复的线路所得的收敛值做对比,分析程序与方法的稳定性,同时配备全站仪测量,每隔5环测得隧道收敛值,并对2种方法做差值对比。默认全站仪的精度较高为真实值,对比三维激光移动扫描与全站仪测量的结果和分布规律。
实验地点为上海某线路长期沉降及收敛值测量,在来回推扫对比的时发现对比偏差值较小,总计推扫对比数据14 916个,累计重复推扫多达10余个区间,其中收敛差绝对值在1 mm以下的有13 753环,占总比例的92.2%,差值绝对值在1~2 mm的有944环,差值绝对值在2~3 mm的有144环,收敛差绝对值大于3 mm的有75环,占总比例的0.51 %,可认为目前的推扫计算方法与程序具有相当高的稳定性,可以用于长期监测使用,部分数据如表1所示。

表1 扫描仪内符合对比偏差表
在第一步实验中证明了扫描仪推扫系统的可行性与稳定性,第二步对比同时间段全站仪联测的长期沉降数据,扫描仪数据全站仪数据的差值整体呈上下波动形,说明两者之间的仪器误差较小、可能存在的整体性误差的较小或可忽略,如图5所示。

图5 全站仪与扫描仪收敛值对比示意图
激光扫描结果与长期收敛结果对比偏差统计,在对比的7 723组数据中,偏差绝对值在0~3 mm的占88.79%,3~5 mm的占9.68%,大于5 mm的占1.63%。同时其数值差异的分布基本没有集中现象,说明可能存在的系统性误差较小,如图6所示。

图6 差值分布示意图
4 结 论
移动激光扫描拥有快速且高精度的特性,利用轨道便利,一组小车在一晚上3 h内可以推扫多达5 000环的收敛变形信息与病害的收集,可以为地铁的运营维护节省相当大的人力与物力,通过多次实验与优化表明:
(1)拼接成的假三维空间点云精度受里程计和扫描仪的误差纠正处理影响巨大,正确的里程排布与扫描仪三维方向的相对误差纠正可以进一步提高移动激光扫描系统的精确性。
(2)根据《城市轨道交通工程测量规范》中变形测量Ⅱ级所要求的±3 mm、±5 mm的变形下,移动激光扫描测量精度目前可以满足该规范的要求。
(3)里程计记录受滚轮完整性影响,在推扫过程中会不可避免的产生磨损与误差,需要定期检修。若某一段区间通关管片宽度计算的起始里程差与里程计记录的里程差超过2倍管片宽度,必须重新校核2个里程计。
猜你喜欢
导航定位学报(2022年5期)2022-10-13
现代仪器与医疗(2022年2期)2022-08-11
汽车实用技术(2022年14期)2022-07-30
汽车工程师(2021年11期)2021-12-21
今日农业(2021年7期)2021-11-27
软件导刊(2019年12期)2019-02-07
火力与指挥控制(2018年1期)2018-03-02
车迷(2017年12期)2018-01-18
中国动物保健(2015年4期)2015-10-21
现代营销·经营版(2015年3期)2015-04-20