基于组态王的陆上海洋平台远程监控系统设计与应用
2020-04-09 04:41李存军李德堂厉梁华军张祖国郑贞明
无线互联科技 2020年2期
关键词:组态王
李存军 李德堂 厉梁 华军 张祖国 郑贞明


摘 要:復杂的环境状况对海洋工程平台的安全性构成极大威胁,针对自升式平台缺少远程监控的问题,设计了基于组态王的陆上模拟海洋远程监控系统。文章对陆上海洋模拟平台远程监测系统各个部分进行介绍,并对传感器数据采集探头进行安装调试,利用组态王软件对历史数据进行采集、存储、绘制曲线并完成远程操控。通过实验对监控系统进行了验证,为海洋平台安全提供了保障。
关键词:组态王;陆上海洋平台;远程监控系统
在海洋资源勘探开发中,自升式平台应用量位居大型海洋工程装备首位。特别是近年来我国着力推动能源结构转型,加大了海上风电的开发和利用,为了避免海上风电场、风浪流环境影响,满足高精度、高可靠的风电设施建造和安装,几乎全部采用自升式平台为海上作业支撑。不稳定的海样环境会对平台构成巨大威胁,例如海底地基承载力不够和海浪台风对平台冲击,桩腿可能会突然穿透上覆硬土层进入下卧地层,形成刺穿,导致平台结构受损,造成重大经济损失[1-6]。
为了更好地保护研究人员安全,采取网络远程控制技术对平台进行监控,即利用一台电脑远距离控制下位机,在控制过程中,将以太网传输控制协议/互联协议(Transmission Control Protocol/Internet Protocol,TCP/IP)网络数据通信作为基础,控制计算机与被控对象运行,确保网络通信等各项功能可以顺利实现。通过互联网与陆控制中心对接,完成数据分析、缓存数据文件存储、报警等功能,科学评价平台安全工作状态,实现恶劣海况下平台远程控制,实时保障平台安全作业。
课题组在陆上海洋模拟平台进行远程监控系统安装调试,测试了在桩脚沉降工况下,组态王软件对海洋平台进行远程升降监控,如图1所示。
1 远程监控系统设计
1.1 系统原理
远程监控系统分为4部分,主要是传感器、监测与控制、网络通信、远程监控终端。
第一部分为传感器,包含平台液压系统内部压力与流量、平台桩脚的位移与形变参数、平台倾斜角度、平台外部环境变化(波浪大小等)等探测器。
第二部分为监测与控制,通过传感器的数据采集,获得的实时数据经过数据采集模块EM231,将4位模拟量转化为PLC内部处理的12位数字量。西门子S7-200是监控器部分的核心部件,通过对S7-200控制器编程实现对平台数据监测与控制功能。
第三部分网络通信,S7-200可编程控制器具有网络连接模块,本系统配置CP243-1以太网模块,以便将S7-200plc与以太网连接,以太网基于IEEE02.3标准,其通信协议基于ISO和TCP/IP技术。CP243-1模块高达100 Mbit/s的速度由网络进行数据传输,并最多同时支持8个连接。
第四部分远程监控终端,监测终端由计算机处理,提供图形化的呈现效果(见图2)。安装远程监控软件,数据信息经过无线传输到计算机,通过对数据接收,数字信号进行转化、数据滤波、数据实时显示保存、数据的预测。安全评判软件进行安全性分析并得出平台的安全状态,发生故障及时报警。
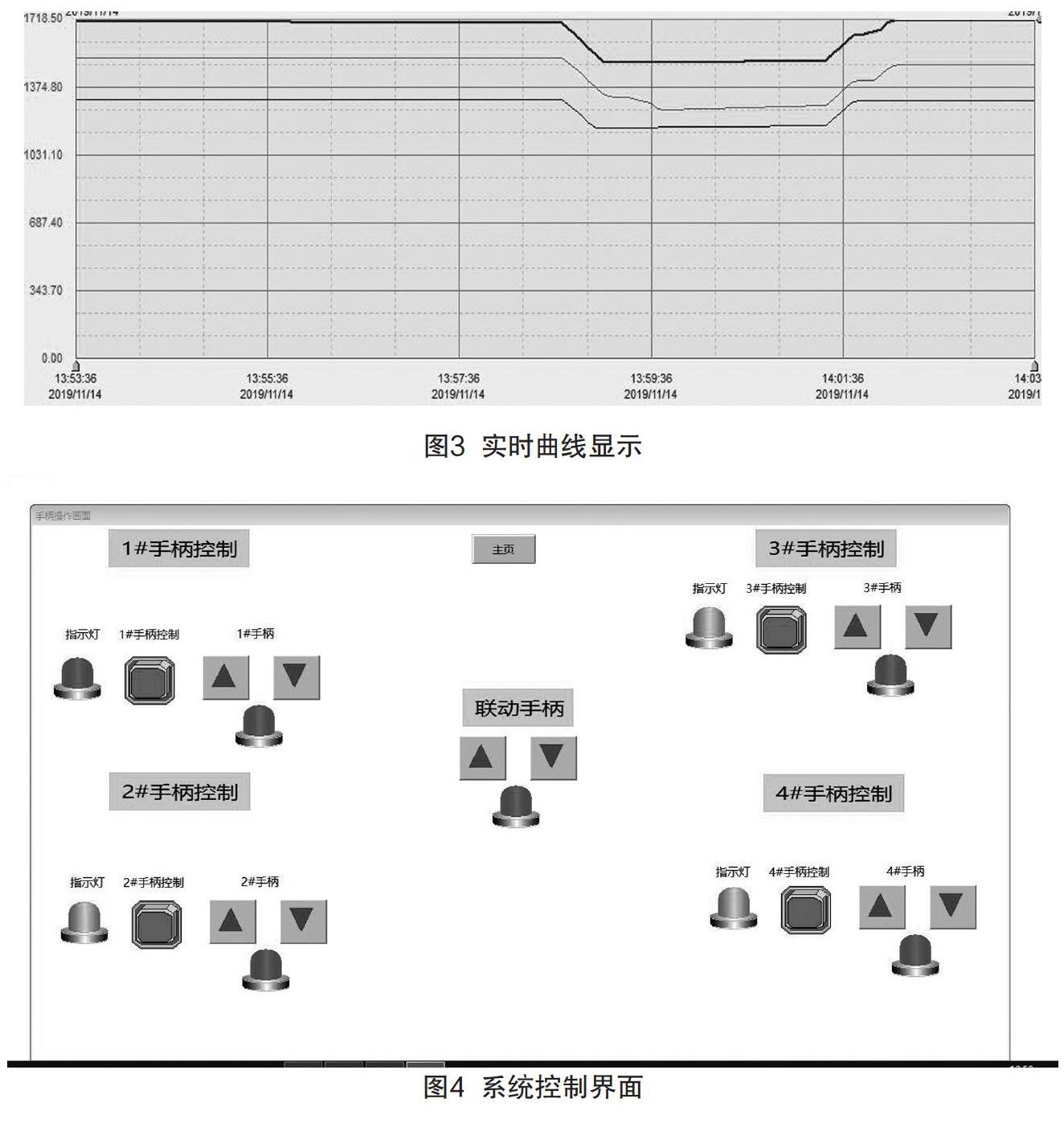
1.2 组态王监控系统界面
组态王是亚控科技根据当前自动化技术的发展趋势,面向自动化市场的应用,以实现企业一体化为目标开发的一套产品。该产品以搭建战略性工业应用服务平台为目标,集成了对亚控科技自主研发的工业实时数据库的支持,为企业提供一个对整个生产流程进行数据汇总、分析及管理的有效平台,使企业能够及时、有效地获取信息,并做出反应,以获得最优化的结果。
2 组态监测系统应用
图5为模拟海洋平台在桩腿突然刺穿地基而突然下沉时的地基压力变化实时曲线。
在陆上模拟地基沉降工况测试。首先,运用桩腿齿轮传动将模拟海洋平台4条桩腿升高至离地面,其次,将4个对应地基逐步提升至完全承受平台自身重力,根据平台双倾角传感器,调整平台倾斜角小于0.1°。
曲线开始时,压力较为稳定,范围在110~140 Bar,14时31分后桩腿突然下沉,地基压力出现波动,报警系统开始预警;14时35分后地基压力变化范围为114~280Bar,特别不稳定。此时远程操作平台完成桩腿的升降及时撤离危险环境,警报解除。
3 结语
本文阐述了基于组态软件对海洋平台远程控制系统原理,设计了监控软件数据监测界面和控制界面,并进行了海洋平台桩腿沉降对地基压力变化数据采集实验。验证了本系统的可靠性与可行性。
[参考文献]
[1]王楠.黄河废弃水下三角洲土体破坏机制及桩靴承载能力研究[D].青岛:中国海洋大学,2013.
[2]KELLEZI L,STROMANN H.FEM analysis of jack-up spud penetration for multi-layered critical soil conditions[D].Copenhagen:GEO-Danish Geotechnical Institute,2018.
[3]LEUNG C F,TEH K L,CHOW Y K.Study on jack-up spud-through soft soil engineering[J].Chan&Law,2007(5):291-298.
[4]TATEISHI H,WATANABE Y.Leg penetration monitor system to avoid the punch-through accidents of jack-up rigs[C].Shanghai:Offshore Technology Conference 5223,1986.
[5]CASSIDY M J,HOULSBY G T,HOYLE M,et al.Determining appropriate stiffness levels for spudcan foundations using jack-up case records[J].Conference Paper,2002(3):22-25.
[6]MICIC S,LO K Y,SHANG J Q.A new technology fo r increasing the load-carrying capacities of offshore foundations in soft clays[J].Canadian Geotechnical Journal,2011(5):949-963.
Abstract:The complicated environment poses a great threat to the safety of the offshore engineering platform. Aiming at the problem that the jack-up platform lacks remote monitoring, a land-based simulated offshore remote monitoring system based on kingview is designed. This paper introduces various parts of the remote monitoring system of the land and ocean simulation platform, installs and debugs the sensor data acquisition probe, and uses kingview software to collect, store, draw curves and complete remote control. The monitoring system is verified by experiments, which provides a guarantee for the safety of the offshore platform.
Key words:kingview; land and ocean platform; remote monitoring system
猜你喜欢
电子制作(2017年23期)2017-02-02
中国教育技术装备(2016年20期)2016-12-12
武夷学院学报(2015年3期)2015-07-18
河南科技(2015年8期)2015-03-11
机电产品开发与创新(2014年6期)2014-03-11
船海工程(2007年4期)2007-09-20